现代监控量测新技术 课程讲义 袁永博赵璐刘辰龙编著 大连理工大学建设工程学部 2016年11月
现 代 监 控 量 测 新 技 术 课 程 讲 义 袁永博 赵璐 刘辰龙 编著 大连理工大学 建设工程学部 2016 年 11 月
第一章:数字图像相关技术 1.1数字图像相关测量系统 数字图像相关方法(Digital Image Correlation Method,简称DICM),又称为 数字散斑相关方法(Digital Speckle Correlation Method,简称DSCM),是应用计 算机视觉技术的一种图像测量方法。数字图像相关方法利用摄像机获取变形前后 被测物表面的数字图像,再通过对变形前后的图像进行相关匹配运算得到被测物 表面各点的位移。 数字图像相关测量首先要获取被测结构或构件变形前后的图像,要保证图像 的质量就必须要有一个稳定的测量系统,图11就是一个典型的数字图像相关测 量系统,它主要由光源、摄像机和计算机组成。在图像采集过程中,摄像机固定 不动。被测结构或构件受荷载作用发生变形,其表面的点产生位移,摄像机通过 拍摄图片的方法记录下该位移值。数字图像相关方法计算得到的位移是摄像机与 被测物之间的相对位移,要使这个相对位移可以代表实际位移,显然数字图像相 关测量系统要满足一定的条件。首先摄像机的位置必需固定不变,一般将摄像机 安装在三脚架上,从开始拍下初始图像到最后一幅图像采集完毕整个过程三脚架 不能移动,摄像机与三脚架之间也不能有相对的移动,即使摄像机微小的抖动也 可能对测量结果产生很大的影响。其次摄像机的光轴要与被测物表面近似成90 度,这是为了保证摄像机靶面与被测物表面平行。 加载系统 一光源 90 计算机 试样 图像采集设备 光源 图11数字图像相关测量系统示意图 摄像机作为数字图像相关测量系统的关键性元件,除了安装时要满足以上要 求外,本身的性能也十分重要。摄像机的性能指标主要包括传感器类型、分辨率、 信噪比、焦距、帧速率等。目前数码摄像机的传感器主要有CCD(电荷藕合)元
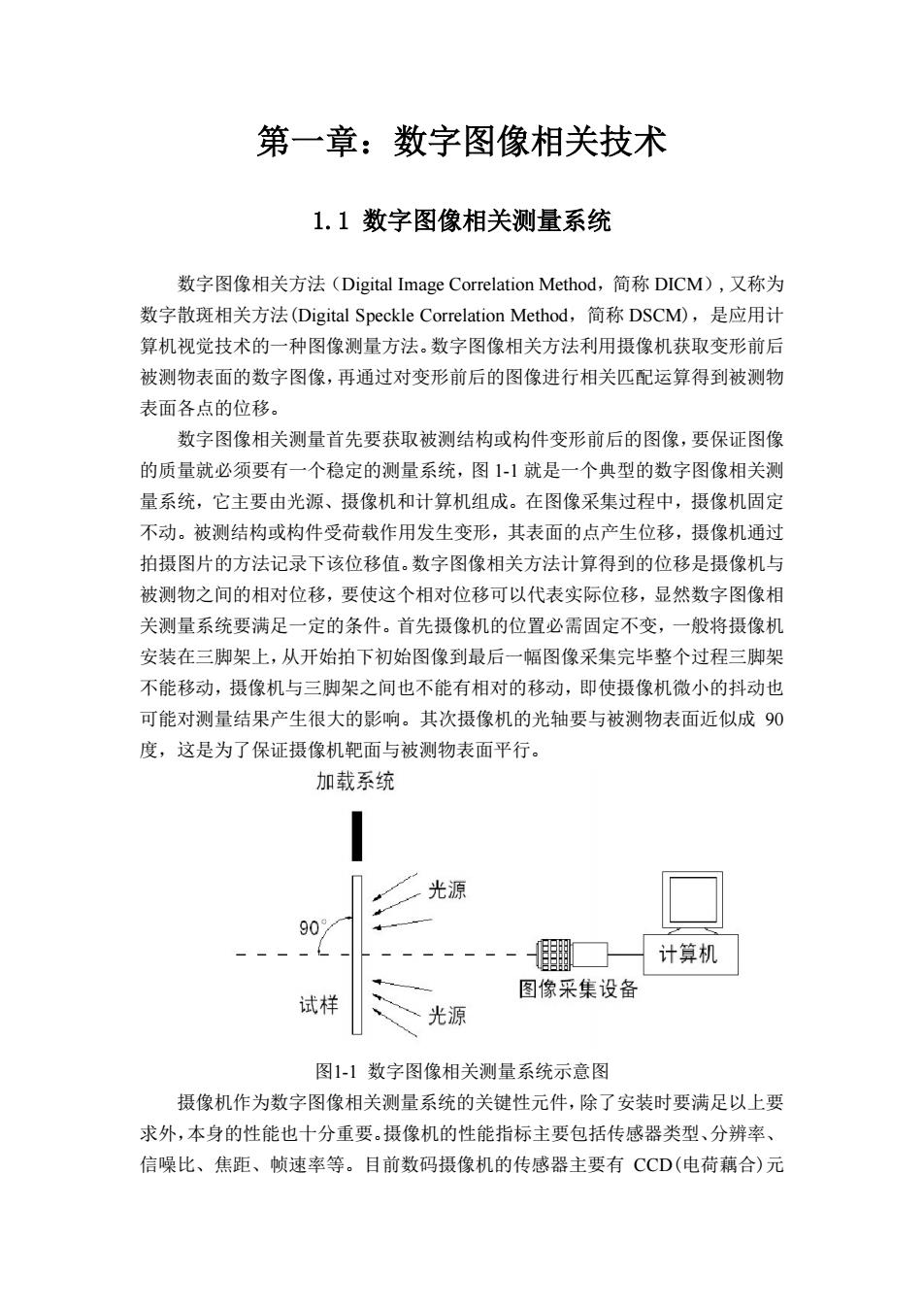
第一章:数字图像相关技术 1.1 数字图像相关测量系统 数字图像相关方法(Digital Image Correlation Method,简称 DICM),又称为 数字散斑相关方法(Digital Speckle Correlation Method,简称 DSCM),是应用计 算机视觉技术的一种图像测量方法。数字图像相关方法利用摄像机获取变形前后 被测物表面的数字图像,再通过对变形前后的图像进行相关匹配运算得到被测物 表面各点的位移。 数字图像相关测量首先要获取被测结构或构件变形前后的图像,要保证图像 的质量就必须要有一个稳定的测量系统,图 1-1 就是一个典型的数字图像相关测 量系统,它主要由光源、摄像机和计算机组成。在图像采集过程中,摄像机固定 不动。被测结构或构件受荷载作用发生变形,其表面的点产生位移,摄像机通过 拍摄图片的方法记录下该位移值。数字图像相关方法计算得到的位移是摄像机与 被测物之间的相对位移,要使这个相对位移可以代表实际位移,显然数字图像相 关测量系统要满足一定的条件。首先摄像机的位置必需固定不变,一般将摄像机 安装在三脚架上,从开始拍下初始图像到最后一幅图像采集完毕整个过程三脚架 不能移动,摄像机与三脚架之间也不能有相对的移动,即使摄像机微小的抖动也 可能对测量结果产生很大的影响。其次摄像机的光轴要与被测物表面近似成 90 度,这是为了保证摄像机靶面与被测物表面平行。 图1-1 数字图像相关测量系统示意图 摄像机作为数字图像相关测量系统的关键性元件,除了安装时要满足以上要 求外,本身的性能也十分重要。摄像机的性能指标主要包括传感器类型、分辨率、 信噪比、焦距、帧速率等。目前数码摄像机的传感器主要有 CCD(电荷藕合)元
件和CMOS(互补金属氧化物导体)器件两种,一般认为CCD比CMOS的成像质 量要好,但是CCD制造工艺较复杂,采用CCD的摄像头价格都会相对比较贵。 事实上经过技术改造,目前CCD和CMOS的实际效果的差距己经减小了不少。 而且CMOS的制造成本和功耗都要低于CCD不少,所以很多摄像头生产厂商采 用的CMOS感光元件。摄像机采集到的图像经数字化之后,每幅图像被离散成 m×n像素的灰度矩阵,m×n的大小即为分辨率。在拍摄区域一定的情况下,分 辨率越大,两像素点之间的实际距离就越小,测量精度就越高。信噪比是摄像机 的真实图像信号与噪声信号的比值,单位为分贝,信噪比越大采集图像中噪声信 号所占的比例就越小,图像就越真实。因此数字图像相关测量系统中要选用较大 信噪比的摄像机,一般要求信噪比要达到45dB以上。焦距也是摄像机性能的重 要参数,为了减小因摄像机靶面与被测量物表面不平行的位移的影响,数字图像 相关测量系统中应使用长焦距远心镜头摄像机,而且为了保证图像的相关性,不 宜用自动调焦的摄像机。帧速率是摄像机每秒可采集图像的张数,为了满足动态 测量的需要,帧速率不宜太低。另外数字图像相关测量系统中的摄像机不同于普 通的数码相机,普通的数码相机因图像的畸变较大,不能用于专业的测量中。 光源和计算机也是数字图像相关测量系统中重要的组成部分。为了保证图像 的质量和变形前后图像的相关性,要求光源可以提供一个均匀稳定的光场。在白 天且测量时间不是很长的情况下,自然光就可以满足要求。如果光线不足或者夜 间测量则可用人工光源。计算机是数字图像相关计算的载体,一方面采集到的图 像要通过数据线传输并存储到计算机中:另一方面需要在计算机中编制程序或者 软件对图像进行处理和计算,因此计算机的运算速度也很大程度上决定了数字图 像相关方法的数据处理时间, 另外,数字图像相关测量过程中还对被测物表面提出了一定的要求:表面可 以近似为一个平面:被测物变形主要在面内,离面位移可以忽略:表面具有类似散 斑图的随机灰度分布。前面两个条件一般很难人工干预,只能通过进行一些近似 处理尽量降低影响。最后一个条件相对比较容易解决,实际上很多土木工程中的 结构或构件表面(如混凝土表面、岩石表面等)本身就满足这一要求,如果不满足 可以在喷制人工散斑。 1.2数字图像相关的基本原理 数字图像相关测量系统采集到的图像实际是以矩阵的形式存储在计算机中, 为了方便表述,可以用x,y)代表变形前的图像,gx',y)代表变形后的图像。数 字图像相关方法的基本原理如图1-2所示,先在变形前的图像中以待测量点 (0,)为中心选取一定大小的子区作为参考图像子区,然后通过一定的相关搜索
件和 CMOS(互补金属氧化物导体)器件两种,一般认为 CCD 比 CMOS 的成像质 量要好,但是 CCD 制造工艺较复杂,采用 CCD 的摄像头价格都会相对比较贵。 事实上经过技术改造,目前 CCD 和 CMOS 的实际效果的差距已经减小了不少。 而且 CMOS 的制造成本和功耗都要低于 CCD 不少,所以很多摄像头生产厂商采 用的 CMOS 感光元件。摄像机采集到的图像经数字化之后,每幅图像被离散成 m n 像素的灰度矩阵, m n 的大小即为分辨率。在拍摄区域一定的情况下,分 辨率越大,两像素点之间的实际距离就越小,测量精度就越高。信噪比是摄像机 的真实图像信号与噪声信号的比值,单位为分贝,信噪比越大采集图像中噪声信 号所占的比例就越小,图像就越真实。因此数字图像相关测量系统中要选用较大 信噪比的摄像机,一般要求信噪比要达到 45dB 以上。焦距也是摄像机性能的重 要参数,为了减小因摄像机靶面与被测量物表面不平行的位移的影响,数字图像 相关测量系统中应使用长焦距远心镜头摄像机,而且为了保证图像的相关性,不 宜用自动调焦的摄像机。帧速率是摄像机每秒可采集图像的张数,为了满足动态 测量的需要,帧速率不宜太低。另外数字图像相关测量系统中的摄像机不同于普 通的数码相机,普通的数码相机因图像的畸变较大,不能用于专业的测量中。 光源和计算机也是数字图像相关测量系统中重要的组成部分。为了保证图像 的质量和变形前后图像的相关性,要求光源可以提供一个均匀稳定的光场。在白 天且测量时间不是很长的情况下,自然光就可以满足要求。如果光线不足或者夜 间测量则可用人工光源。计算机是数字图像相关计算的载体,一方面采集到的图 像要通过数据线传输并存储到计算机中;另一方面需要在计算机中编制程序或者 软件对图像进行处理和计算,因此计算机的运算速度也很大程度上决定了数字图 像相关方法的数据处理时间。 另外,数字图像相关测量过程中还对被测物表面提出了一定的要求:表面可 以近似为一个平面;被测物变形主要在面内,离面位移可以忽略;表面具有类似散 斑图的随机灰度分布。前面两个条件一般很难人工干预,只能通过进行一些近似 处理尽量降低影响。最后一个条件相对比较容易解决,实际上很多土木工程中的 结构或构件表面(如混凝土表面、岩石表面等)本身就满足这一要求,如果不满足 可以在喷制人工散斑。 1.2 数字图像相关的基本原理 数字图像相关测量系统采集到的图像实际是以矩阵的形式存储在计算机中, 为了方便表述,可以用 f(x, y)代表变形前的图像,g(x’, y’)代表变形后的图像。数 字图像相关方法的基本原理如图 1-2 所示,先在变形前的图像中以待测量点 (x0, y0)为中心选取一定大小的子区作为参考图像子区,然后通过一定的相关搜索
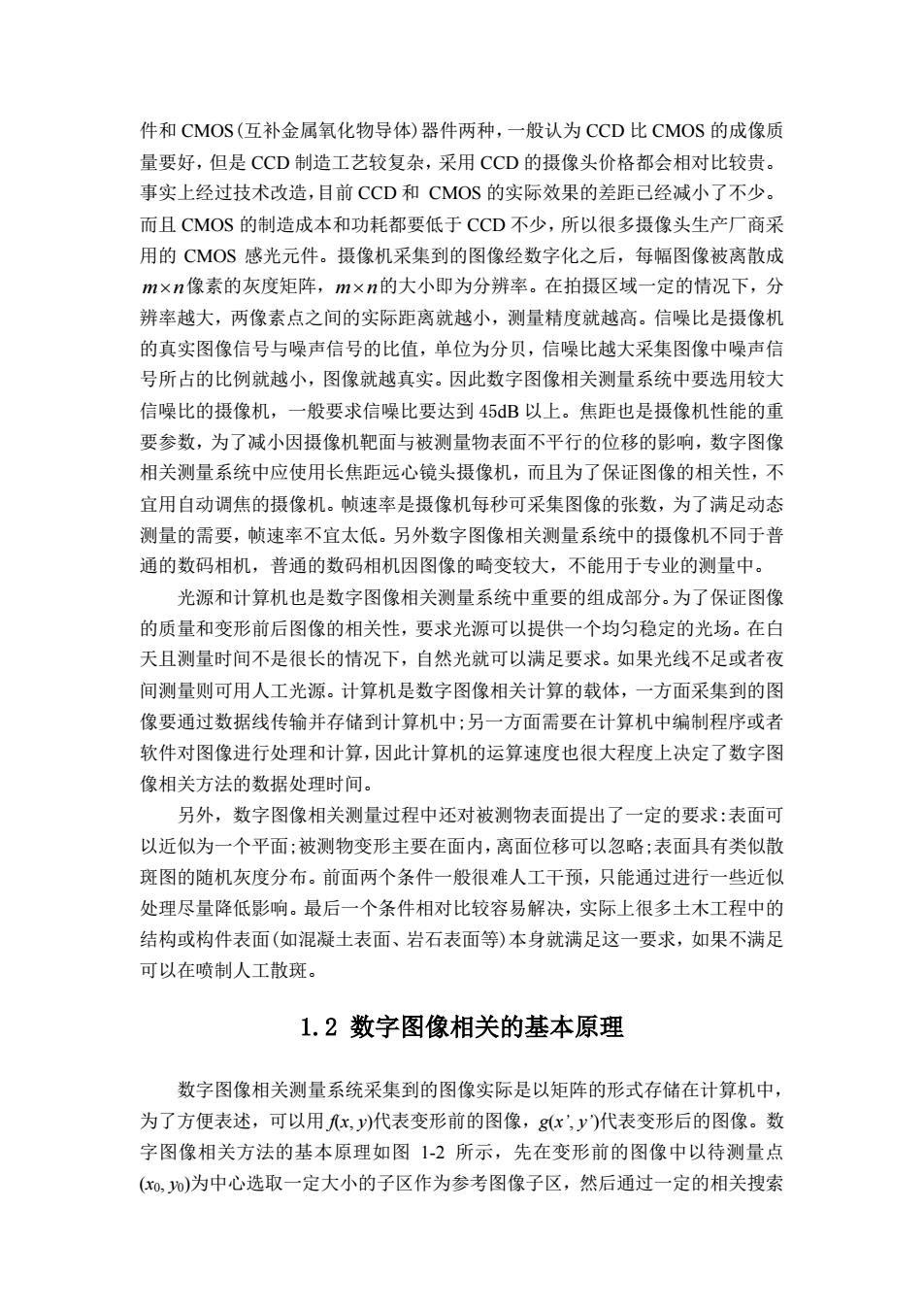
方法在变形后的图像中找到与参考图像子区相关性最大的以(x0',,')为中心的目 标图像子区。则测量点(物,o)的位移为:u=一x,v=6一为。此处计算出的 位移是图片上的位移(单位是像素),需要经过标定换算,就可得到待测点的实际 位移。 变形后的图像仅 图1-2变形前后的图像子区 1.2.1位移形函数 参考图像子区在变形后,不仅中心位置发生了变化,而且整个子区形状也可 能会发生变化,为了表示这种变化可以引用有限元中的位移形函数。设参考图像 子区中任一点(xy)经变形后,对应目标图像子区中的(x',y)点。由于变形后图像 子区不仅其中心位置会发生变化,而且形状也可能改变。因此,我们可以通过“形 函数”和待定参数矢量P将变形前后图像子区中对应点的坐标x,)和(x,y门联系 起来: x'=x+5(x,y,p) (1) y'=y+n(x,y,p) 如果目标图像子区相对于参考图像子区只有平移,则可用零阶形函数来描 述 5(x,y,p)=u (2) n(x,y,p)=v 上式中的u和"是子区中心点(,)分别在x和y方向上的位移。但在大多 数情况下,被测物表面不只是发生了刚体位移,还可能发生拉压、弯曲、剪切等 变形。于是必需引入一阶位移形函数:
方法在变形后的图像中找到与参考图像子区相关性最大的以(x0’, y0’)为中心的目 标图像子区。则测量点(x0, y0)的位移为: , 0 0 u x x , , 0 0 v y y 。此处计算出的 位移是图片上的位移(单位是像素),需要经过标定换算,就可得到待测点的实际 位移。 图 1-2 变形前后的图像子区 1.2.1 位移形函数 参考图像子区在变形后,不仅中心位置发生了变化,而且整个子区形状也可 能会发生变化,为了表示这种变化可以引用有限元中的位移形函数。设参考图像 子区中任一点(x, y)经变形后,对应目标图像子区中的(x’, y’)点。由于变形后图像 子区不仅其中心位置会发生变化,而且形状也可能改变。因此,我们可以通过“形 函数”和待定参数矢量 p 将变形前后图像子区中对应点的坐标(x, y)和(x’, y’)联系 起来: x x x y p ' ( , , ) y y x y p ' ( , , ) 如果目标图像子区相对于参考图像子区只有平移,则可用零阶形函数来描 述: ( , , ) x y p u ( , , ) x y p v 上式中的 u 和 v 是子区中心点(x0, y0)分别在 x 和 y 方向上的位移。但在大多 数情况下,被测物表面不只是发生了刚体位移,还可能发生拉压、弯曲、剪切等 变形。于是必需引入一阶位移形函数: (1) (2)

(3) =r+盘4a+y 有学者认为随着图像子区尺寸和位移梯度的增大,图像子区内的位移场保持 线性的可能性降低,因此必须要考虑模板窗口的非均匀变形,此时一阶形函数己 经没法描述实际的变形和位移了,就需要引入二阶形函数。能描述更为复杂变形 状态的二阶形函数表达式如下: r++++需A 12 axoy +4+4r+ (4) 7x,y,p)=v+ 2x 24+ 1.2.2相关函数 数字图像相关方法中的相关函数是评价变形前后图像子区相似程度的函数, 是待求变形参数的函数。数字图像相关方法以相关函数为判断依据,在变形后的 图像中搜索,找到与变形前图像子区的相关函数为极值的子区。相关函数有多种 不同的形式,归纳起来分为三类:互相关函数(Cross-correlation criteria)、最小平 方距离函数(Sum of squared difference criteria))和参数最小平方距离函数 (Parametric sum of squared difference criteria)。三类相关函数分别列在表l-l,表 1-2和表1-3。 表1-1常用的互相关函数 互相关函数 公式 直接互相关函数 cac-是fk,gx,n f(x,y)g(x.y) 标准化互相关函 台MM 数 兰克Um-gn-8l 标准化协方差相 关函数 .y)-s.F
( , , ) u u x y p u x y x y ( , , ) v v x y p v x y x y 有学者认为随着图像子区尺寸和位移梯度的增大,图像子区内的位移场保持 线性的可能性降低,因此必须要考虑模板窗口的非均匀变形,此时一阶形函数已 经没法描述实际的变形和位移了,就需要引入二阶形函数。能描述更为复杂变形 状态的二阶形函数表达式如下: 2 2 2 2 2 2 2 1 1 ( , , ) 2 2 u u u u u x y p u x y x y x y x y x y x y 2 2 2 2 2 2 2 1 1 ( , , ) 2 2 v v v v v x y p v x y x y x y x y x y x y 1.2.2 相关函数 数字图像相关方法中的相关函数是评价变形前后图像子区相似程度的函数, 是待求变形参数的函数。数字图像相关方法以相关函数为判断依据,在变形后的 图像中搜索,找到与变形前图像子区的相关函数为极值的子区。相关函数有多种 不同的形式,归纳起来分为三类:互相关函数(Cross-correlation criteria)、最小平 方 距 离函 数 (Sum of squared difference criteria) 和 参 数 最小 平方距 离 函 数 (Parametric sum of squared difference criteria)。三类相关函数分别列在表 1-1,表 1-2 和表 1-3。 表 1-1 常用的互相关函数 互相关函数 公式 直接互相关函数 ( , ) ( ', ') x M y M CC x M y M C f x y g x y 标准化互相关函 数 2 2 ( , ) ( ', ') ( , ) ( ', ') M M x M y M NCC M M M M x M y M x M y M f x y g x y C f x y g x y 标准化协方差相 关函数 2 2 [ ( , ) ][ ( ', ') ] [ ( , ) ] [ ( ', ') ] M M m m x M y M ZNCC M M M M m m x M y M x M y M f x y f g x y g C f x y f g x y g (3) (4)