表1-2常用的最小平方距离函数 最小平 方距离 公式 相关函 数 最小平 方距离 [f(x,y)-g(x',y] 相关函 数 归一化 的最小 f(x,y) g(x.y) 平方距 C=之 M 离相关 函数 零均值 归一化 f(x,y)-f g(x',y)-8m 的最小 平方距 之x,)-] 之之[gx-8 Vx=-M y=-M -M y=-M 离相关 函数 表13常用的参数最小平方距离函数 参数最小平方距离函 公式 数 带有一个未知参数a 的最小平方距离相关 觉L-8 函数 带有一个位置参数b 的最小平方距离相关 Crm-[f.g. =-M=-M 函数 带有两个参数的最小 [af(x.y)+b-g(x'.y) 平方距离函数
表 1-2 常用的最小平方距离函数 最小平 方距离 相关函 数 公式 最小平 方距离 相关函 数 2 [ ( , ) ( ', ')] x M y M SSD x M y M C f x y g x y 归一化 的最小 平方距 离相关 函数 2 2 2 ( , ) ( ', ') ( , ) ( ', ') M M NSSD M M M M x M y M x M y M x M y M f x y g x y C f x y g x y 零均值 归一化 的最小 平方距 离相关 函数 2 2 2 ( , ) ( ', ') ( , ) ( ', ') M M m m ZNSSD x M y M M M M M m m x M y M x M y M f x y f g x y g C f x y f g x y g 表 1-3 常用的参数最小平方距离函数 参数最小平方距离函 数 公式 带有一个未知参数 a 的最小平方距离相关 函数 2 ( , ) ( ', ') x M y M PSSDa x M y M C af x y g x y 带有一个位置参数 b 的最小平方距离相关 函数 2 ( , ) ( ', ') x M y M PSSDb x M y M C f x y b g x y 带有两个参数的最小 平方距离函数 2 ( , ) ( ', ') x M y M PSSDab x M y M C af x y b g x y
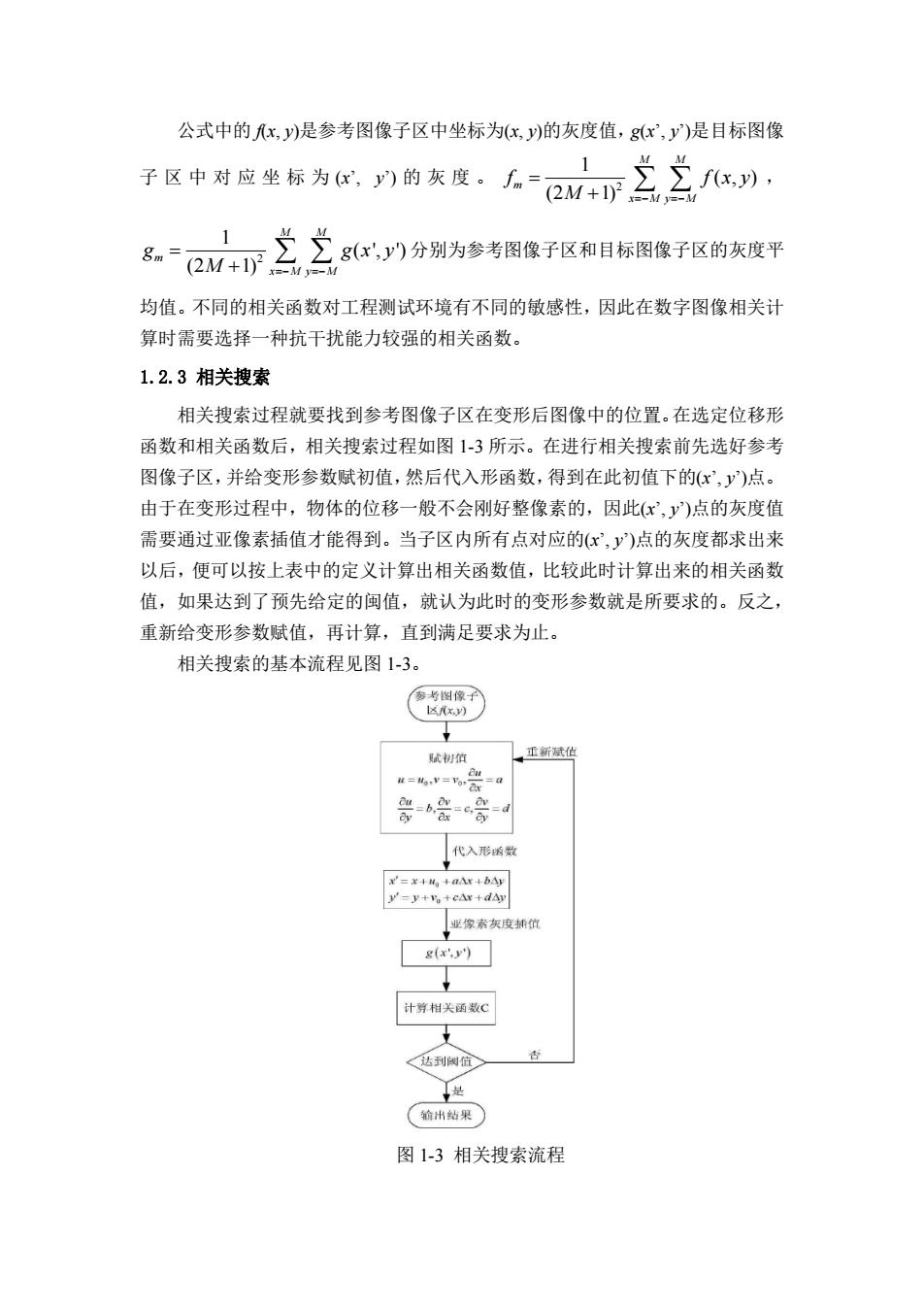
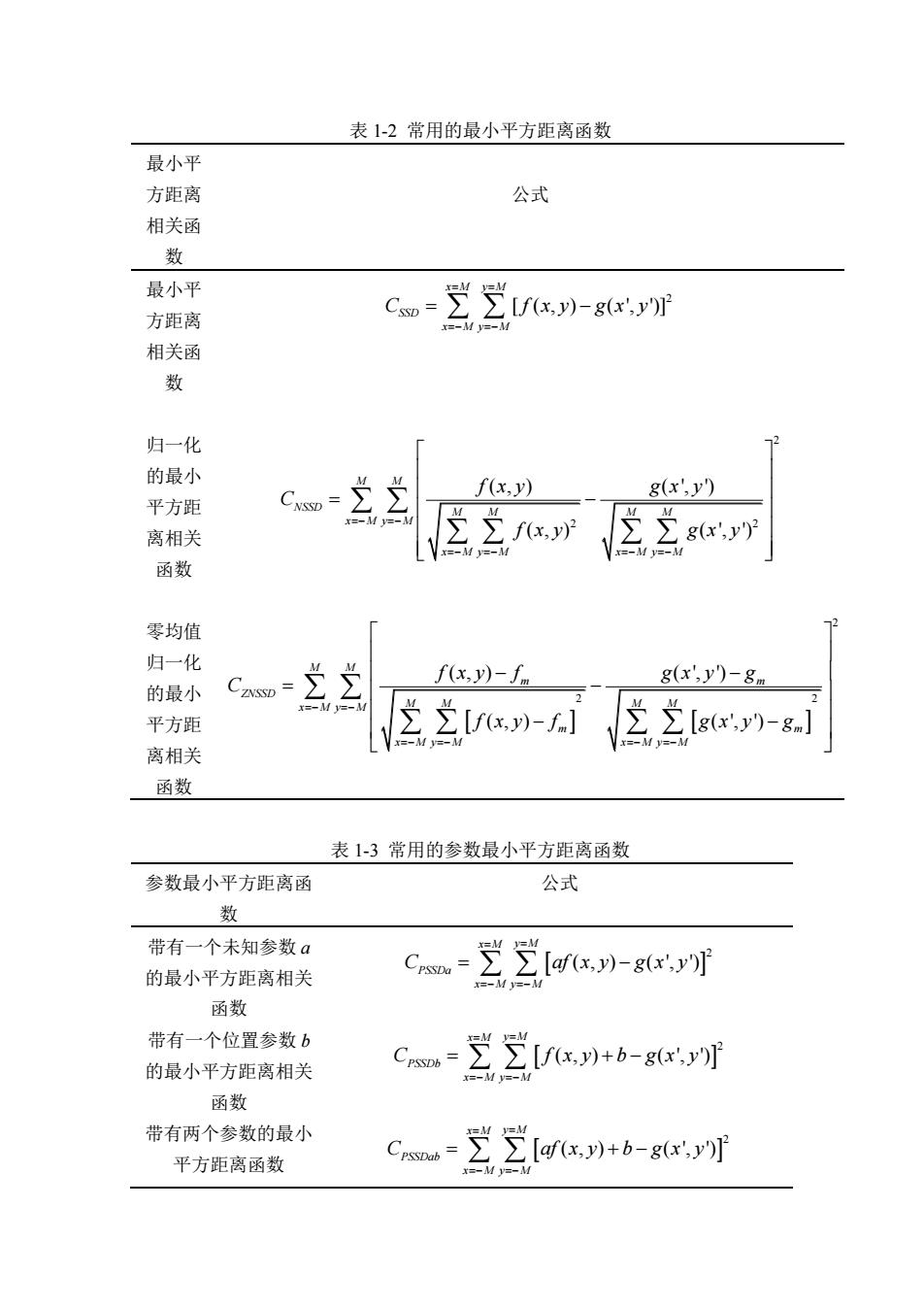
公式中的x)是参考图像子区中坐标为化,)的灰度值,gx,y)是目标图像 子区中对应坐标为化,n的东度.人=2W三之c, 8.2M+ΣΣ8x,)分别为参考图像子区和目标图像子区的灰度平 均值。不同的相关函数对工程测试环境有不同的敏感性,因此在数字图像相关计 算时需要选择一种抗干扰能力较强的相关函数。 1.2.3相关搜索 相关搜索过程就要找到参考图像子区在变形后图像中的位置。在选定位移形 函数和相关函数后,相关搜索过程如图13所示。在进行相关搜索前先选好参考 图像子区,并给变形参数赋初值,然后代入形函数,得到在此初值下的(x,y)点。 由于在变形过程中,物体的位移一般不会刚好整像素的,因此(x,y)点的灰度值 需要通过亚像素插值才能得到。当子区内所有点对应的(x,y)点的灰度都求出来 以后,便可以按上表中的定义计算出相关函数值,比较此时计算出来的相关函数 值,如果达到了预先给定的闽值,就认为此时的变形参数就是所要求的。反之, 重新给变形参数赋值,再计算,直到满足要求为止。 相关搜索的基本流程见图13。 成初值 正新威丝 程m.量m =b会-cg=d 代入形函 Y'=x+m+aAr+bAv y=y+。+cr+dy 亚像素灰度辅的 g(.y) 计算相关属数C (输州果 图1-3相关搜索流程
公式中的 f(x, y)是参考图像子区中坐标为(x, y)的灰度值,g(x’, y’)是目标图像 子 区 中 对 应 坐 标 为 (x’, y’) 的 灰 度 。 2 1 ( , ) (2 1) M M m x M y M f f x y M , 2 1 ( ', ') (2 1) M M m x M y M g g x y M 分别为参考图像子区和目标图像子区的灰度平 均值。不同的相关函数对工程测试环境有不同的敏感性,因此在数字图像相关计 算时需要选择一种抗干扰能力较强的相关函数。 1.2.3 相关搜索 相关搜索过程就要找到参考图像子区在变形后图像中的位置。在选定位移形 函数和相关函数后,相关搜索过程如图 1-3 所示。在进行相关搜索前先选好参考 图像子区,并给变形参数赋初值,然后代入形函数,得到在此初值下的(x’, y’)点。 由于在变形过程中,物体的位移一般不会刚好整像素的,因此(x’, y’)点的灰度值 需要通过亚像素插值才能得到。当子区内所有点对应的(x’, y’)点的灰度都求出来 以后,便可以按上表中的定义计算出相关函数值,比较此时计算出来的相关函数 值,如果达到了预先给定的闽值,就认为此时的变形参数就是所要求的。反之, 重新给变形参数赋值,再计算,直到满足要求为止。 相关搜索的基本流程见图 1-3。 图 1-3 相关搜索流程
1.2.4像素位移与实际位移的转化 数字图像相关方法计算的位移是图像上的虚拟位移,单位是像素。结构工程 测试实践中,必需将此像素位移转换为实际位移。最直接的方法是在图像中拍下 一个标尺,然后根据标尺上两参考点的实际距离(单位为mm)除以这两点之间的 像素个数n,就可以得到每个像素代表的实际位移,也可称为转换系数=m。 1.3图像相关方法应用于土木工程中的优势与问题 数字图像相关方法作为一种新型的光学测量方法,将其应用于土木结构变形 测量中,与传统的方法相比具有其独特的优势: ()非接触式测量。非接触式是指测量过程中,无需接触被测构件。接触式 的测量都要求找到固定的参照基准点或基准梁来安装传感器,对于大型空间结构, 如大跨度桥梁的挠度,高层建筑结构的动态位移监测等,很难或基本无法找到固 定的参照基准点。这时非接触式的方法的优势就突显出来了。另外非接触式测量 还不会因为接触对被测量结构的受力或变形状态产生影响。 (2)全场测量。数字图像相关方法可以测量出整个被测区域的位移场或应变 场。这对于研究构件的局部变形十分重要,如结构或构件的应力集中区域、关键 部位和处于复杂应力状态下的区域等,这些区域的位移和应变场的分布对于结构 设计或研究都是很重要的。现在的大部分方法都无法进行全场测量,有时为了得 到全场应变分布不惜花费大量的人力物力和时间来制作光弹模型,并以光弹模型 实验结果作为指导。由此可见,全场测量是极其重要的。 (③)一次测量既可获得位移又可获得应变。数字图像相关方法只需一次图像 采集就可以经过计算得到位移和应变,而传统的方法要获得位移和应变,需要用 两种不同的方法来测量,如用位移传感器来测量位移,电阻应变方法来测量应变 毫无疑问测工作量成倍的增加,且两种测量过程可能相互制约和相互影响。 (4)数据采集过程简单。数字图像相关方法的数据采集过程光路简单,无需 激光作为光源,自然光就能满足要求,只用对构件表面作简单处理(表面纹理可 以近似为散斑场时,可以不用处理,如混凝土表面,没有喷涂的钢材表面)。采 集前的准备工作也很少,不需要进行传感器的安装、贴应变片等这些复杂的工作。 数字图像相关方法虽然有以上的诸多优势,但是目前该方法还没有在土木结 构变形测量中广泛的应用,主要是因为还存在以下方面的问题: (1)位移计算精度随距离变化。数字图像相关方法的位移计算精度虽然可以 达0.01像素,但是如果距离较远时,测量的区域就会变大,图像上每像素对应 的实际长度就会增大,精度也就随之降低。这使得数字图像相关方法难以进行远
1.2.4 像素位移与实际位移的转化 数字图像相关方法计算的位移是图像上的虚拟位移,单位是像素。结构工程 测试实践中,必需将此像素位移转换为实际位移。最直接的方法是在图像中拍下 一个标尺,然后根据标尺上两参考点的实际距离 l(单位为 mm)除以这两点之间的 像素个数 n,就可以得到每个像素代表的实际位移,也可称为转换系数 r= l/n。 1.3 图像相关方法应用于土木工程中的优势与问题 数字图像相关方法作为一种新型的光学测量方法,将其应用于土木结构变形 测量中,与传统的方法相比具有其独特的优势: (1)非接触式测量。非接触式是指测量过程中,无需接触被测构件。接触式 的测量都要求找到固定的参照基准点或基准梁来安装传感器,对于大型空间结构, 如大跨度桥梁的挠度,高层建筑结构的动态位移监测等,很难或基本无法找到固 定的参照基准点。这时非接触式的方法的优势就突显出来了。另外非接触式测量 还不会因为接触对被测量结构的受力或变形状态产生影响。 (2)全场测量。数字图像相关方法可以测量出整个被测区域的位移场或应变 场。这对于研究构件的局部变形十分重要,如结构或构件的应力集中区域、关键 部位和处于复杂应力状态下的区域等,这些区域的位移和应变场的分布对于结构 设计或研究都是很重要的。现在的大部分方法都无法进行全场测量,有时为了得 到全场应变分布不惜花费大量的人力物力和时间来制作光弹模型,并以光弹模型 实验结果作为指导。由此可见,全场测量是极其重要的。 (3)一次测量既可获得位移又可获得应变。数字图像相关方法只需一次图像 采集就可以经过计算得到位移和应变,而传统的方法要获得位移和应变,需要用 两种不同的方法来测量,如用位移传感器来测量位移,电阻应变方法来测量应变。 毫无疑问测工作量成倍的增加,且两种测量过程可能相互制约和相互影响。 (4)数据采集过程简单。数字图像相关方法的数据采集过程光路简单,无需 激光作为光源,自然光就能满足要求,只用对构件表面作简单处理(表面纹理可 以近似为散斑场时,可以不用处理,如混凝土表面,没有喷涂的钢材表面)。采 集前的准备工作也很少,不需要进行传感器的安装、贴应变片等这些复杂的工作。 数字图像相关方法虽然有以上的诸多优势,但是目前该方法还没有在土木结 构变形测量中广泛的应用,主要是因为还存在以下方面的问题: (1)位移计算精度随距离变化。数字图像相关方法的位移计算精度虽然可以 达 0.01 像素,但是如果距离较远时,测量的区域就会变大,图像上每像素对应 的实际长度就会增大,精度也就随之降低。这使得数字图像相关方法难以进行远
距离测量。 (2)应变测量精度低。应变比较位移更能反应结构内部的变形情况,数字图 像相关方法的理论应变测量精度只有20μe,而实际测量时由于噪声等方面的影 响,更是只有100ue左右。 (3)计算效率有待提高。进行动态测量时,目前数字图像相关方法的计算速 度还难以实现真正的实时测量。而且计算速度往往与计算精度存在着矛盾,有时 为了使计算精度提高,而不得不以增加计算时间为代价。由此如何处理好计算效 率和计算精度之间的关系也十分重要。 (4)许多研究停留在实验室阶段。目前许多研究没有考虑实际工程环境,只 是在实验室内进行,这显然使数字图像相关方法的应用还难以适应复杂的工程环 境。因此还需要更进一步的研究使数字图像相关方法与工程实际结合起来。才能 让数字图像相关方法在土木结构中广泛的应用
距离测量。 (2)应变测量精度低。应变比较位移更能反应结构内部的变形情况,数字图 像相关方法的理论应变测量精度只有 20με,而实际测量时由于噪声等方面的影 响,更是只有 100με 左右。 (3)计算效率有待提高。进行动态测量时,目前数字图像相关方法的计算速 度还难以实现真正的实时测量。而且计算速度往往与计算精度存在着矛盾,有时 为了使计算精度提高,而不得不以增加计算时间为代价。由此如何处理好计算效 率和计算精度之间的关系也十分重要。 (4)许多研究停留在实验室阶段。目前许多研究没有考虑实际工程环境,只 是在实验室内进行,这显然使数字图像相关方法的应用还难以适应复杂的工程环 境。因此还需要更进一步的研究使数字图像相关方法与工程实际结合起来。才能 让数字图像相关方法在土木结构中广泛的应用
第二章:非接触视频测量仪 非接触视频测量仪是一套由英国艾美创(metrum)公司研发的二维位移测量 系统。该系统基于数字图像处理技术实现位移数据的非接触式测量。整套仪器包 括一个己安装好配套分析软件的笔记本电脑、高分辨率数字摄像机、镜头以及三 脚架,摄像机与笔记本电脑由一根千兆网线相连,实现数据的传输。该仪器已广 泛应用于工程检测和各类力学实验中。 图2-1非接触视频测量仪在力学实验中的应用 a)摄像机:b)千兆网线:c)配套电脑 在工程检测方面的应用主要包含:桥梁检测、道路检测、铁轨检测、是坝检 测等。 图2-2非接触视频测量仪在桥梁检测中的应用
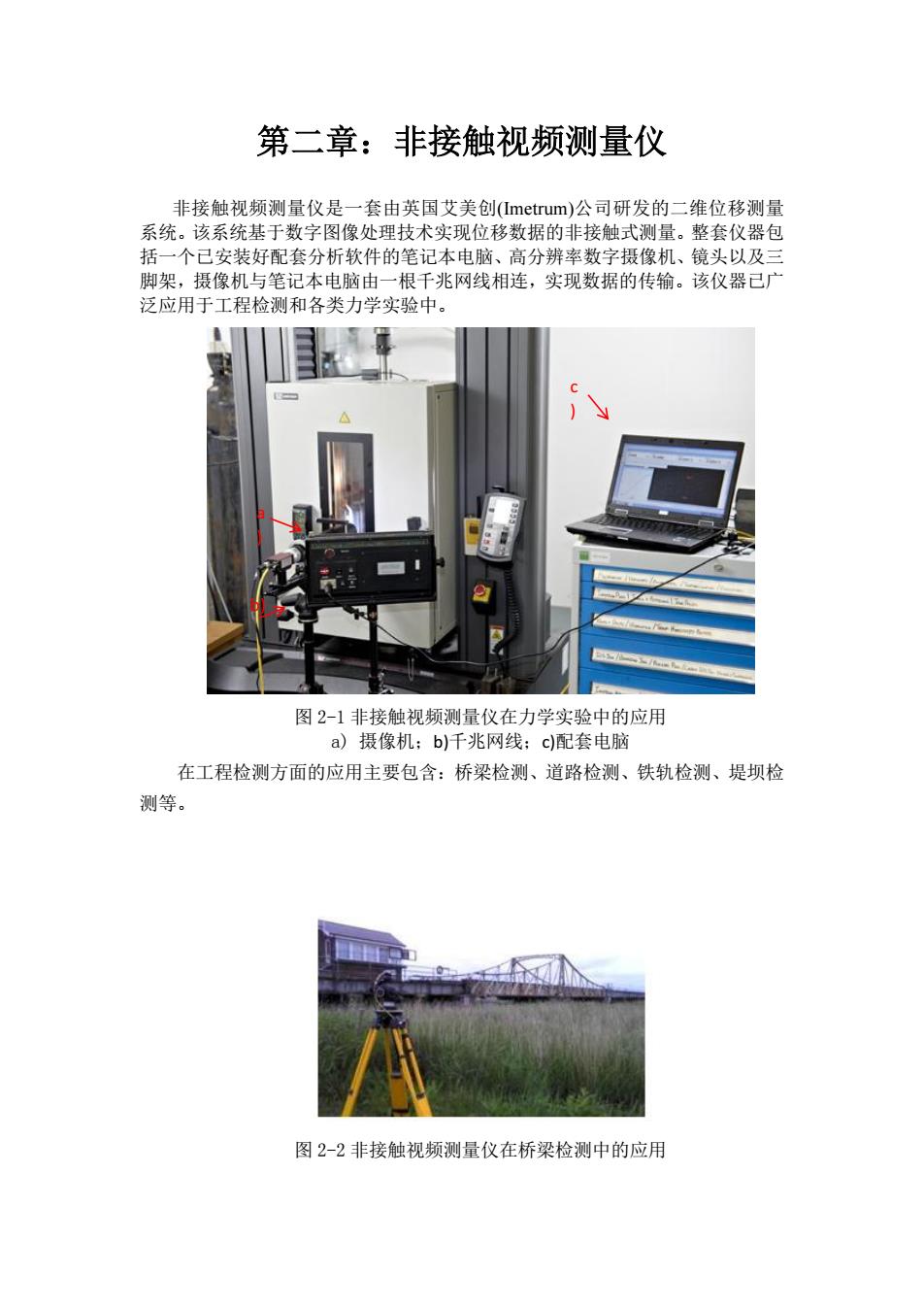
第二章:非接触视频测量仪 非接触视频测量仪是一套由英国艾美创(Imetrum)公司研发的二维位移测量 系统。该系统基于数字图像处理技术实现位移数据的非接触式测量。整套仪器包 括一个已安装好配套分析软件的笔记本电脑、高分辨率数字摄像机、镜头以及三 脚架,摄像机与笔记本电脑由一根千兆网线相连,实现数据的传输。该仪器已广 泛应用于工程检测和各类力学实验中。 图 2-1 非接触视频测量仪在力学实验中的应用 a) 摄像机;b)千兆网线;c)配套电脑 在工程检测方面的应用主要包含:桥梁检测、道路检测、铁轨检测、堤坝检 测等。 图 2-2 非接触视频测量仪在桥梁检测中的应用 a ) b) c )