粒子图像测速技术 课程讲义 授课人: 杜海 单位:大连理工大学建设工程学部 编制日期:2016年4月5日
粒 子 图 像 测 速 技 术 课 程 讲 义 授课人: 杜 海 单 位:大连理工大学 建设工程学部 编制日期: 2016 年 4 月 5 日

第一章:粒子图像测试技术与摄影测量法 1.1概述 粒子图像测速技术(Particle Image Velocimetry,.PIV)是在流动显示基 础上发展起来的一种散斑图像测速技术。该技术充分利用了像面上所“冻结”的 流场信息来剖析流体运动,具有非接触式测量的特点。PIV技术作为一种具有代 表性的运动追踪测量技术在各个应用研究领域中也显示出其独特的魅力与重要 价值,如在医学研究领域中血液流动测试、在工程领域中的管道测量、在环境研 究领域的搅拌器流动测试、水产养殖领域的人工渔礁周围流场测试、航空领域中 的飞行器风洞测试、汽车研究领域中的车体结构流动测试等等。目前PIV技术作 为一种流体测量技术的价值已在科研与工业中得到了充分的验证,应用举例见图 1-1。 (a)飞行器设计 (b)管道研究 (c)船舶研制 图1-1PIV在给个行业中的应用 在流体测量技术的发展中看粒子图像测速的技术特点 在过去的几十年里,为了满足人们研究流动的物理机理及动力学特性的需要, 流体测量技术取得了很多进展。以流速测量为例,传统的皮托管测速成本低、操 作简单,但它的动态性能差,对流场扰动大,精度不高。热线热膜流速计(WAF) 结合了现代迅猛发展的电子技术,测量精度和频响都大大提高了,但如果流场范 围较小,与探头大小可比时,测量的空间分辨率受到限制,且此时对流场的影响 很大。相比之下,激光多普勒测速仪(LDV)在测量较小的流场时显示出它的非 接触式测量的优点,具有极好的时间分辨率和空间分辨力,可做三维测速,已经 成为流速测量的标准技术并得到了广泛应用。相位多普勒测速仪(PDA或PDAP) 不仅能像LDⅣ那样给出粒子的速度,而且可以给出粒子的粒径,在两相流动的测
第一章:粒子图像测试技术与摄影测量法 1.1 概 述 粒子图像测速技术(Particle Image Velocimetry, PIV)是在流动显示基 础上发展起来的一种散斑图像测速技术。该技术充分利用了像面上所“冻结”的 流场信息来剖析流体运动,具有非接触式测量的特点。PIV 技术作为一种具有代 表性的运动追踪测量技术在各个应用研究领域中也显示出其独特的魅力与重要 价值,如在医学研究领域中血液流动测试、在工程领域中的管道测量、在环境研 究领域的搅拌器流动测试、水产养殖领域的人工渔礁周围流场测试、航空领域中 的飞行器风洞测试、汽车研究领域中的车体结构流动测试等等。目前 PIV 技术作 为一种流体测量技术的价值已在科研与工业中得到了充分的验证,应用举例见图 1-1。 (a) 飞行器设计 (b) 管道研究 (c) 船舶研制 图 1-1 PIV 在给个行业中的应用 在流体测量技术的发展中看粒子图像测速的技术特点 在过去的几十年里,为了满足人们研究流动的物理机理及动力学特性的需要, 流体测量技术取得了很多进展。以流速测量为例,传统的皮托管测速成本低、操 作简单,但它的动态性能差,对流场扰动大,精度不高。热线热膜流速计(HWAF) 结合了现代迅猛发展的电子技术,测量精度和频响都大大提高了,但如果流场范 围较小,与探头大小可比时,测量的空间分辨率受到限制,且此时对流场的影响 很大。相比之下,激光多普勒测速仪(LDV)在测量较小的流场时显示出它的非 接触式测量的优点,具有极好的时间分辨率和空间分辨力,可做三维测速,已经 成为流速测量的标准技术并得到了广泛应用。相位多普勒测速仪(PDA 或 PDAP) 不仅能像 LDV 那样给出粒子的速度,而且可以给出粒子的粒径,在两相流动的测
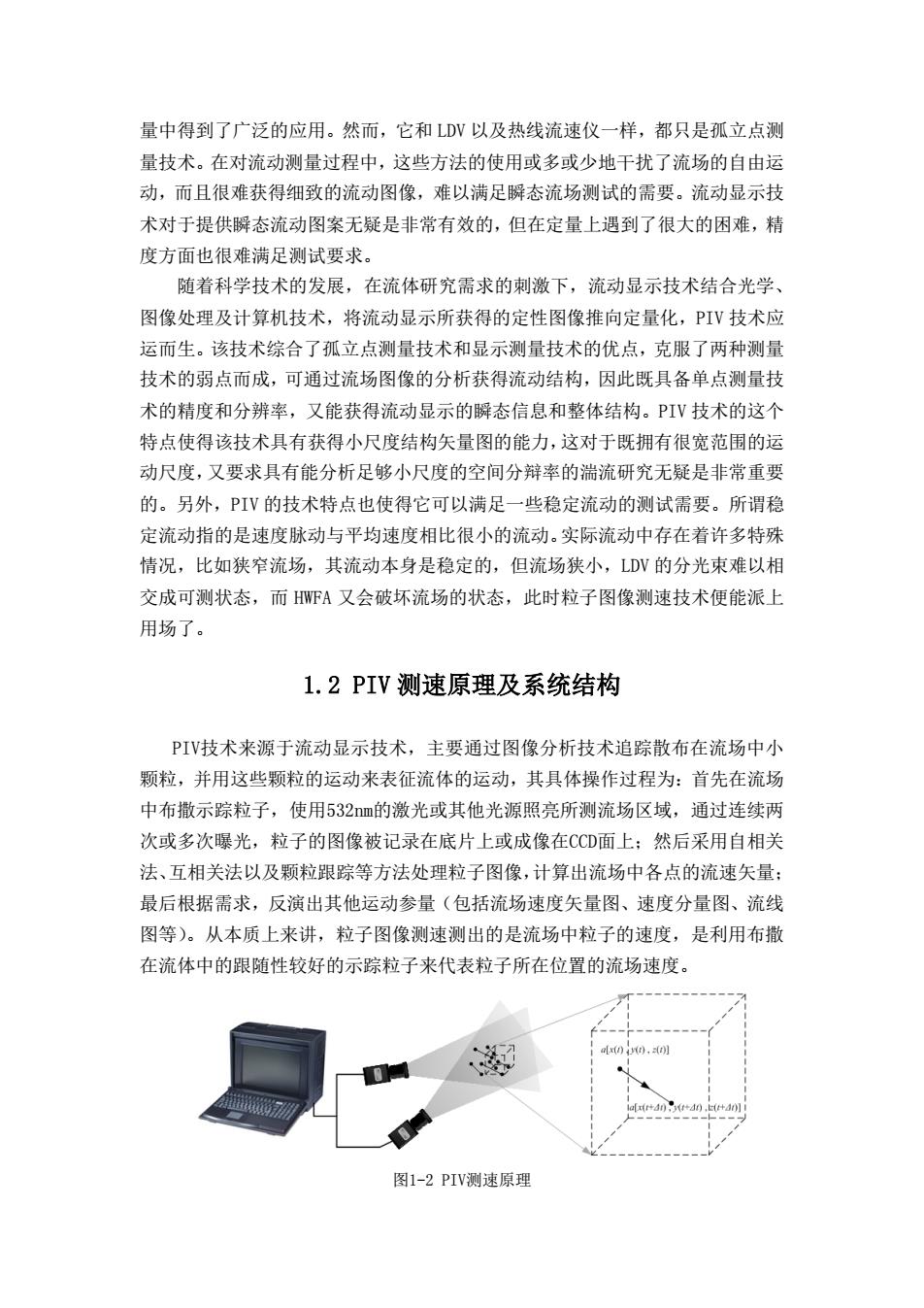
量中得到了广泛的应用。然而,它和LDV以及热线流速仪一样,都只是孤立点测 量技术。在对流动测量过程中,这些方法的使用或多或少地干扰了流场的自由运 动,而且很难获得细致的流动图像,难以满足瞬态流场测试的需要。流动显示技 术对于提供瞬态流动图案无疑是非常有效的,但在定量上遇到了很大的困难,精 度方面也很难满足测试要求。 随着科学技术的发展,在流体研究需求的刺激下,流动显示技术结合光学、 图像处理及计算机技术,将流动显示所获得的定性图像推向定量化,PIV技术应 运而生。该技术综合了孤立点测量技术和显示测量技术的优点,克服了两种测量 技术的弱点而成,可通过流场图像的分析获得流动结构,因此既具备单点测量技 术的精度和分辨率,又能获得流动显示的瞬态信息和整体结构。PIV技术的这个 特点使得该技术具有获得小尺度结构矢量图的能力,这对于既拥有很宽范围的运 动尺度,又要求具有能分析足够小尺度的空间分辩率的湍流研究无疑是非常重要 的。另外,PV的技术特点也使得它可以满足一些稳定流动的测试需要。所谓稳 定流动指的是速度脉动与平均速度相比很小的流动。实际流动中存在着许多特殊 情况,比如狭窄流场,其流动本身是稳定的,但流场狭小,LDⅣ的分光束难以相 交成可测状态,而FA又会破坏流场的状态,此时粒子图像测速技术便能派上 用场了。 1.2PIV测速原理及系统结构 PIV技术来源于流动显示技术,主要通过图像分析技术追踪散布在流场中小 颗粒,并用这些颗粒的运动来表征流体的运动,其具体操作过程为:首先在流场 中布撒示踪粒子,使用532m的激光或其他光源照亮所测流场区域,通过连续两 次或多次曝光,粒子的图像被记录在底片上或成像在CCD面上:然后采用自相关 法、互相关法以及颗粒跟踪等方法处理粒子图像,计算出流场中各点的流速矢量: 最后根据需求,反演出其他运动参量(包括流场速度矢量图、速度分量图、流线 图等)。从本质上来讲,粒子图像测速测出的是流场中粒子的速度,是利用布撒 在流体中的跟随性较好的示踪粒子来代表粒子所在位置的流场速度。 图1-2PIV测速原理
量中得到了广泛的应用。然而,它和 LDV 以及热线流速仪一样,都只是孤立点测 量技术。在对流动测量过程中,这些方法的使用或多或少地干扰了流场的自由运 动,而且很难获得细致的流动图像,难以满足瞬态流场测试的需要。流动显示技 术对于提供瞬态流动图案无疑是非常有效的,但在定量上遇到了很大的困难,精 度方面也很难满足测试要求。 随着科学技术的发展,在流体研究需求的刺激下,流动显示技术结合光学、 图像处理及计算机技术,将流动显示所获得的定性图像推向定量化,PIV 技术应 运而生。该技术综合了孤立点测量技术和显示测量技术的优点,克服了两种测量 技术的弱点而成,可通过流场图像的分析获得流动结构,因此既具备单点测量技 术的精度和分辨率,又能获得流动显示的瞬态信息和整体结构。PIV 技术的这个 特点使得该技术具有获得小尺度结构矢量图的能力,这对于既拥有很宽范围的运 动尺度,又要求具有能分析足够小尺度的空间分辩率的湍流研究无疑是非常重要 的。另外,PIV 的技术特点也使得它可以满足一些稳定流动的测试需要。所谓稳 定流动指的是速度脉动与平均速度相比很小的流动。实际流动中存在着许多特殊 情况,比如狭窄流场,其流动本身是稳定的,但流场狭小,LDV 的分光束难以相 交成可测状态,而 HWFA 又会破坏流场的状态,此时粒子图像测速技术便能派上 用场了。 1.2 PIV 测速原理及系统结构 PIV技术来源于流动显示技术,主要通过图像分析技术追踪散布在流场中小 颗粒,并用这些颗粒的运动来表征流体的运动,其具体操作过程为:首先在流场 中布撒示踪粒子,使用532nm的激光或其他光源照亮所测流场区域,通过连续两 次或多次曝光,粒子的图像被记录在底片上或成像在CCD面上;然后采用自相关 法、互相关法以及颗粒跟踪等方法处理粒子图像,计算出流场中各点的流速矢量; 最后根据需求,反演出其他运动参量(包括流场速度矢量图、速度分量图、流线 图等)。从本质上来讲,粒子图像测速测出的是流场中粒子的速度,是利用布撒 在流体中的跟随性较好的示踪粒子来代表粒子所在位置的流场速度。 图1-2 PIV测速原理
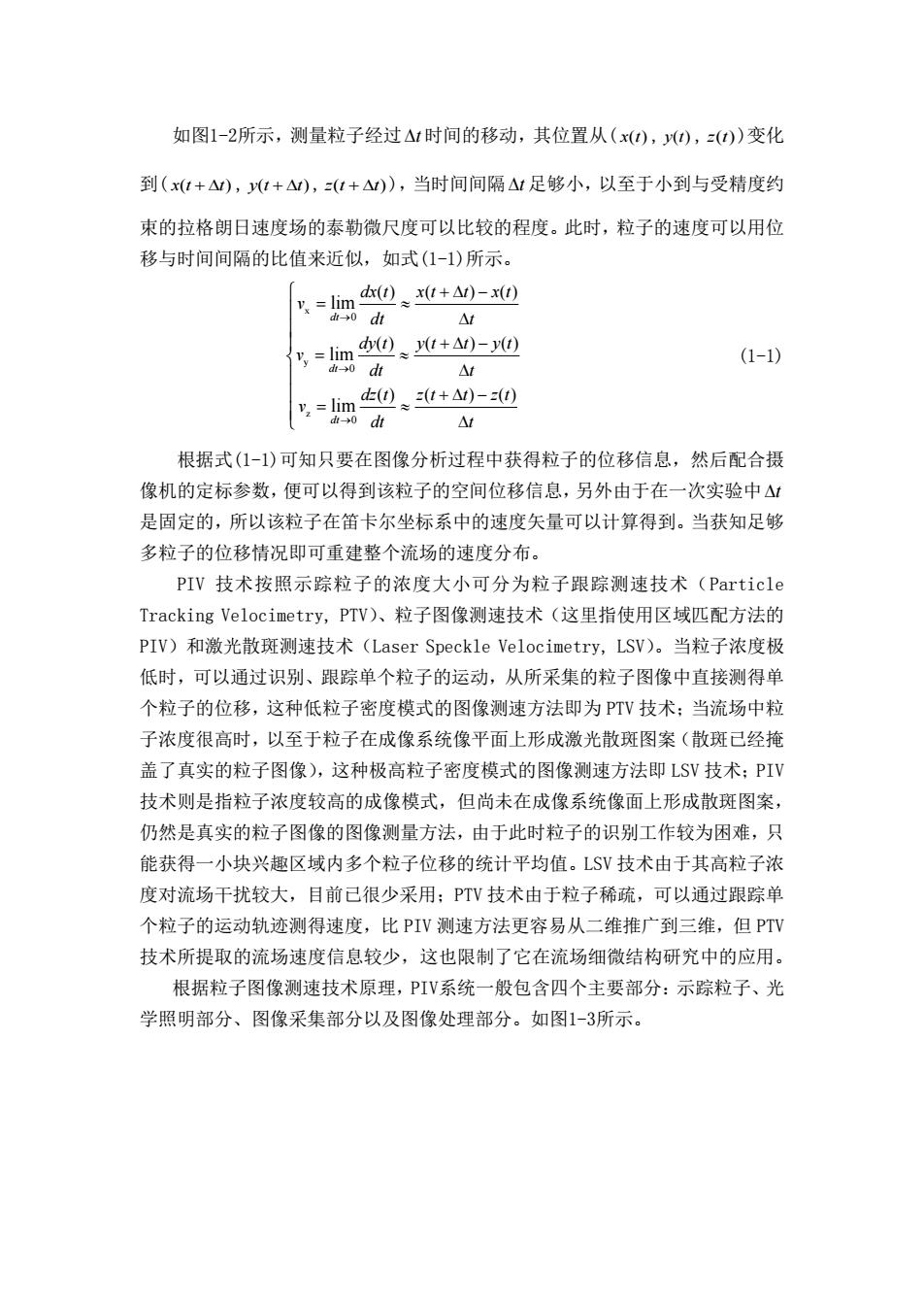
如图1-2所示,测量粒子经过△1时间的移动,其位置从(x0),),())变化 到(x(+),+),+),当时间间隔△M足够小,以至于小到与受精度约 束的拉格朗日速度场的泰勒微尺度可以比较的程度。此时,粒子的速度可以用位 移与时间间隔的比值来近似,如式(1-1)所示。 =网、+-0 d =m0、+4-地 (1-1) d At Ar 根据式(1-1)可知只要在图像分析过程中获得粒子的位移信息,然后配合摄 像机的定标参数,便可以得到该粒子的空间位移信息,另外由于在一次实验中△“ 是固定的,所以该粒子在笛卡尔坐标系中的速度矢量可以计算得到。当获知足够 多粒子的位移情况即可重建整个流场的速度分布。 PIV技术按照示踪粒子的浓度大小可分为粒子跟踪测速技术(Particle Tracking Velocimetry,,PTV)、粒子图像测速技术(这里指使用区域匹配方法的 PIV)和激光散斑测速技术(Laser Speckle Velocimetry.,LSV)。当粒子浓度极 低时,可以通过识别、跟踪单个粒子的运动,从所采集的粒子图像中直接测得单 个粒子的位移,这种低粒子密度模式的图像测速方法即为PTV技术:当流场中粒 子浓度很高时,以至于粒子在成像系统像平面上形成激光散斑图案(散斑已经掩 盖了真实的粒子图像),这种极高粒子密度模式的图像测速方法即LSV技术:PIV 技术则是指粒子浓度较高的成像模式,但尚未在成像系统像面上形成散斑图案, 仍然是真实的粒子图像的图像测量方法,由于此时粒子的识别工作较为困难,只 能获得一小块兴趣区域内多个粒子位移的统计平均值。LSV技术由于其高粒子浓 度对流场干扰较大,目前己很少采用:PTV技术由于粒子稀疏,可以通过跟踪单 个粒子的运动轨迹测得速度,比PIV测速方法更容易从二维推广到三维,但PTV 技术所提取的流场速度信息较少,这也限制了它在流场细微结构研究中的应用。 根据粒子图像测速技术原理,PIV系统一般包含四个主要部分:示踪粒子、光 学照明部分、图像采集部分以及图像处理部分。如图1-3所示
如图1-2所示,测量粒子经过 t 时间的移动,其位置从( xt() , yt() , zt() )变化 到( x t t ( ) , y t t ( ) , z t t ( ) ),当时间间隔 t 足够小,以至于小到与受精度约 束的拉格朗日速度场的泰勒微尺度可以比较的程度。此时,粒子的速度可以用位 移与时间间隔的比值来近似,如式(1-1)所示。 x y z 0 0 0 ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) lim lim lim dt dt dt dx t x t t x t v dt t dy t y t t y t v dt t dz t z t t z t v dt t (1-1) 根据式(1-1)可知只要在图像分析过程中获得粒子的位移信息,然后配合摄 像机的定标参数,便可以得到该粒子的空间位移信息,另外由于在一次实验中 t 是固定的,所以该粒子在笛卡尔坐标系中的速度矢量可以计算得到。当获知足够 多粒子的位移情况即可重建整个流场的速度分布。 PIV 技术按照示踪粒子的浓度大小可分为粒子跟踪测速技术(Particle Tracking Velocimetry, PTV)、粒子图像测速技术(这里指使用区域匹配方法的 PIV)和激光散斑测速技术(Laser Speckle Velocimetry, LSV)。当粒子浓度极 低时,可以通过识别、跟踪单个粒子的运动,从所采集的粒子图像中直接测得单 个粒子的位移,这种低粒子密度模式的图像测速方法即为 PTV 技术;当流场中粒 子浓度很高时,以至于粒子在成像系统像平面上形成激光散斑图案(散斑已经掩 盖了真实的粒子图像),这种极高粒子密度模式的图像测速方法即 LSV 技术;PIV 技术则是指粒子浓度较高的成像模式,但尚未在成像系统像面上形成散斑图案, 仍然是真实的粒子图像的图像测量方法,由于此时粒子的识别工作较为困难,只 能获得一小块兴趣区域内多个粒子位移的统计平均值。LSV 技术由于其高粒子浓 度对流场干扰较大,目前已很少采用;PTV 技术由于粒子稀疏,可以通过跟踪单 个粒子的运动轨迹测得速度,比 PIV 测速方法更容易从二维推广到三维,但 PTV 技术所提取的流场速度信息较少,这也限制了它在流场细微结构研究中的应用。 根据粒子图像测速技术原理,PIV系统一般包含四个主要部分:示踪粒子、光 学照明部分、图像采集部分以及图像处理部分。如图1-3所示

图像采集卡 ,摄像机与镜头 图像处理设备 图1-3PIV系统组成 示踪粒子:为了提高透明流体的可测性,布撒示踪粒子用来显示流体的流动状态, 通过测量粒子的运动来获取流场信息。 光学照明部分:在PIV系统中,为了获取较好质量的粒子图像,需要外部辅助光 源的配合,用以增强示踪粒子散射光的强度,一般采用532m的激光光源,有时 也采用高亮的LED光源。 图像采集部分:PIV的核心是图像分析,所以采集到合适的图像十分重要,因此 不仅需要高帧率、高分辨率的摄像机,还需要大带宽、高速的图像记录设备(如 CameraLink高速图像采集记录器)以及相关的信号控制设备。 图像处理部分:将粒子图像进行相关匹配分析、追踪分析等处理,以得到粒子散 斑的运动,该部分功能主要在P℃机上完成。 1.3摄影测量原理 粒子图像测速方法在本质上说是一种摄影测量技术在透明柔性体运动测量 上的一种应用。了解摄影测量的相关知识对于PIV技术的把握具有着重要的意 摄影测量是通过对摄像成像系统拍摄的图像进行分析计算,测量出被测物体 在三维空间中的几何参数和运动参数的一种测量方法。空间物体通过成像系统映 射在相机的像平面上,因此所采集的图像包含了物体的结构信息(PIV中的粒子 图像包含了示踪粒子的空间分布信息与颗粒的尺度信息)。数字图像的最小单位 为像素(Pixl),每个像素的值(灰度信息)反映了空间物体表面对应点的光强 大小,而该点的图像位置对应于空间物体表面的几何位置。物体在像面上的位置 与它的实际物体位置的对应关系可由成像系统的几何投影模型(或称成像模型)
散播示踪粒子的 被测流场 图像采集卡 图像处理设备 摄像机与镜头 光源 图1-3 PIV系统组成 示踪粒子:为了提高透明流体的可测性,布撒示踪粒子用来显示流体的流动状态, 通过测量粒子的运动来获取流场信息。 光学照明部分:在 PIV 系统中,为了获取较好质量的粒子图像,需要外部辅助光 源的配合,用以增强示踪粒子散射光的强度,一般采用 532nm 的激光光源,有时 也采用高亮的 LED 光源。 图像采集部分:PIV 的核心是图像分析,所以采集到合适的图像十分重要,因此 不仅需要高帧率、高分辨率的摄像机,还需要大带宽、高速的图像记录设备(如 CameraLink 高速图像采集记录器)以及相关的信号控制设备。 图像处理部分:将粒子图像进行相关匹配分析、追踪分析等处理,以得到粒子散 斑的运动,该部分功能主要在 PC 机上完成。 1.3 摄影测量原理 粒子图像测速方法在本质上说是一种摄影测量技术在透明柔性体运动测量 上的一种应用。了解摄影测量的相关知识对于 PIV 技术的把握具有着重要的意 义。 摄影测量是通过对摄像成像系统拍摄的图像进行分析计算,测量出被测物体 在三维空间中的几何参数和运动参数的一种测量方法。空间物体通过成像系统映 射在相机的像平面上,因此所采集的图像包含了物体的结构信息(PIV 中的粒子 图像包含了示踪粒子的空间分布信息与颗粒的尺度信息)。数字图像的最小单位 为像素(Pixel),每个像素的值(灰度信息)反映了空间物体表面对应点的光强 大小,而该点的图像位置对应于空间物体表面的几何位置。物体在像面上的位置 与它的实际物体位置的对应关系可由成像系统的几何投影模型(或称成像模型)