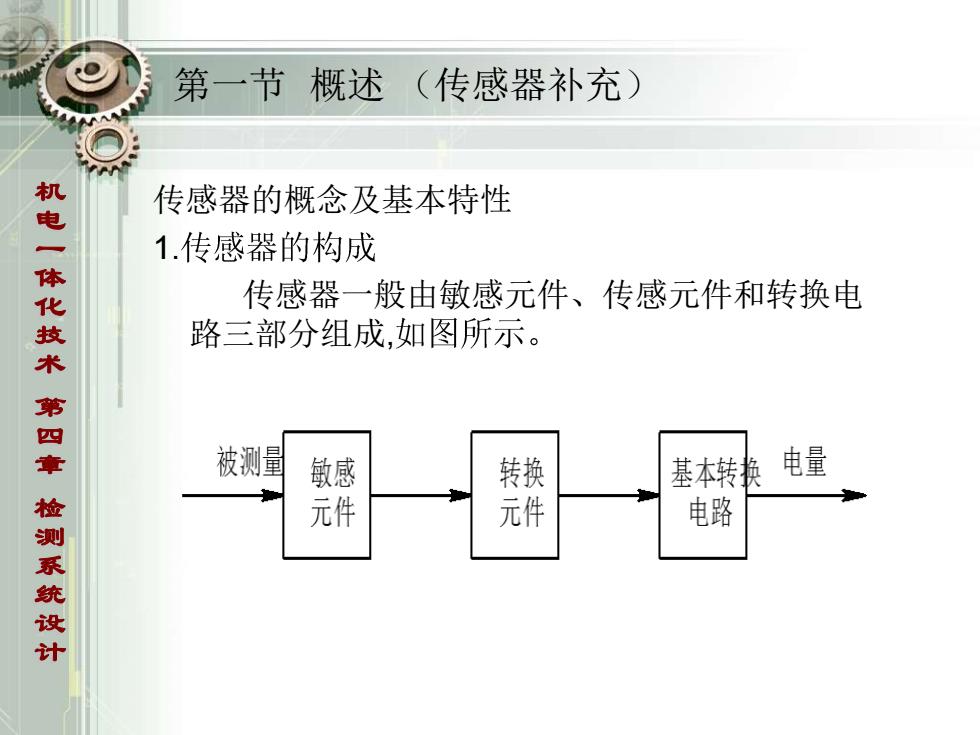
第一节概述 (传感器补充) 传感器的概念及基本特性 1.传感器的构成 机电一体化技术第四章检测系统设计 传感器一般由敏感元件、传感元件和转换电 路三部分组成,如图所示。 被测量 敏感 转换 基本转换 电量 元件 元件 电路
第一节 概述 (传感器补充) 传感器的概念及基本特性 1. 传感器一般由敏感元件、传感元件和转换电 路三部分组成
第一节概述(传感器补充) (1)敏感元件:是一种能够将被测量转换成易于测量的 机电一体化技术 物理量的预变换装置,其输入、输出间具有确定的数 学关系(最好为线性)。如弹性敏感元件将力转换为 位移或应变输出。 (2)传感元件:将敏感元件输出的非电物理量转换成电 第四章 参量信号(如电阻、电感、电容等)或电量信号(如 电荷、电压、电流)形式。 检 (3)基本转换电路:将电参量信号转换成便于测量的电 量信号,如电压、电流、频率等。 系统设计 举例:重量传感器
(1)敏感元件:是一种能够将被测量转换成易于测量的 物理量的预变换装置,其输入、输出间具有确定的数 学关系(最好为线性)。如弹性敏感元件将力转换为 位移或应变输出。 (2)传感元件:将敏感元件输出的非电物理量转换成电 参量信号(如电阻、电感、电容等)或电量信号(如 电荷、电压、电流)形式。 (3)基本转换电路:将电参量信号转换成便于测量的电 量信号,如电压、电流、频率等。 举例:重量传感器 第一节 概述 (传感器补充)
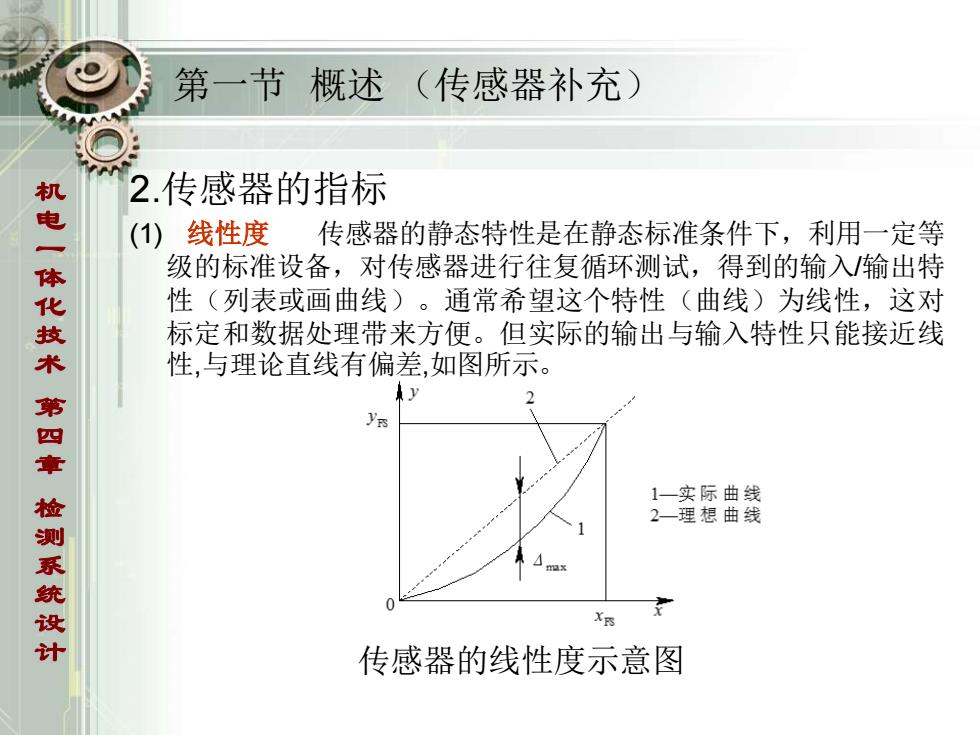
第一节概述 (传感器补充) 2.传感器的指标 (1)线性度 传感器的静态特性是在静态标准条件下,利用一定等 级的标准设备,对传感器进行往复循环测试,得到的输入输出特 机电一体化技术第四章检测系统设计 性(列表或画曲线)。通常希望这个特性(曲线)为线性,这对 标定和数据处理带来方便。但实际的输出与输入特性只能接近线 性,与理论直线有偏差,如图所示。 1一实际曲线 2一理想曲线 传感器的线性度示意图
2.传感器的指标 (1) 线性度 传感器的静态特性是在静态标准条件下,利用一定等 级的标准设备,对传感器进行往复循环测试,得到的输入/输出特 性(列表或画曲线)。通常希望这个特性(曲线)为线性,这对 标定和数据处理带来方便。但实际的输出与输入特性只能接近线 性,与理论直线有偏差,如图所示。 传感器的线性度示意图 第一节 概述 (传感器补充)
第一节概述(传感器补充) 线性度可用下式计算: 题1009% 机电一体化技术第四章检测系统设计 Yz=士 yFs 式中:; YL一线性度(非线性误差): △max一最大非线性绝对误差; ys一输出满度值
线性度可用下式计算: 式中: ; γL——线性度(非线性误差); Δmax——最大非线性绝对误差; yFS ——输出满度值。 第一节 概述 (传感器补充)
第一节概述 (传感器补充) 2) 灵敏度。传感器在静态标准条件下,输出变化对输 机电一体化技术第四章 入变化的比值称为灵敏度,用S表示,即 输出量的变化量_△y 输入量的变化量△x 对于线性传感器来说,它的灵敏度S是个常数。 检测系统设计
第一节 概述 (传感器补充) (2) 灵敏度。传感器在静态标准条件下,输出变化对输 入变化的比值称为灵敏度,用S0表示,即 对于线性传感器来说,它的灵敏度S0是个常数