0
求解超静定系统的基本方法,是解除多余约束, 代之以多余约束反力,根据多余约束处的变形协调条 件建立补充方程进行求解。 解除多余约束后得到的静定结构,称为原超静定 系统的静定基本系统
求解超静定系统的基本方法,是解除多余约束, 代之以多余约束反力,根据多余约束处的变形协调条 件建立补充方程进行求解。 解除多余约束后得到的静定结构,称为原超静定 系统的静定基本系统
在求解超静定结构时,一般先解除多余约束, 代之以多余约束力,得到基本静定系。再根据变形 协调条件得到关于多余约束力的补充方程。这种以 “力”为未知量,由变形协调条件为基本方程的方 法,称为力法
在求解超静定结构时,一般先解除多余约束, 代之以多余约束力,得到基本静定系。再根据变形 协调条件得到关于多余约束力的补充方程。这种以 “力”为未知量,由变形协调条件为基本方程的方 法,称为力法
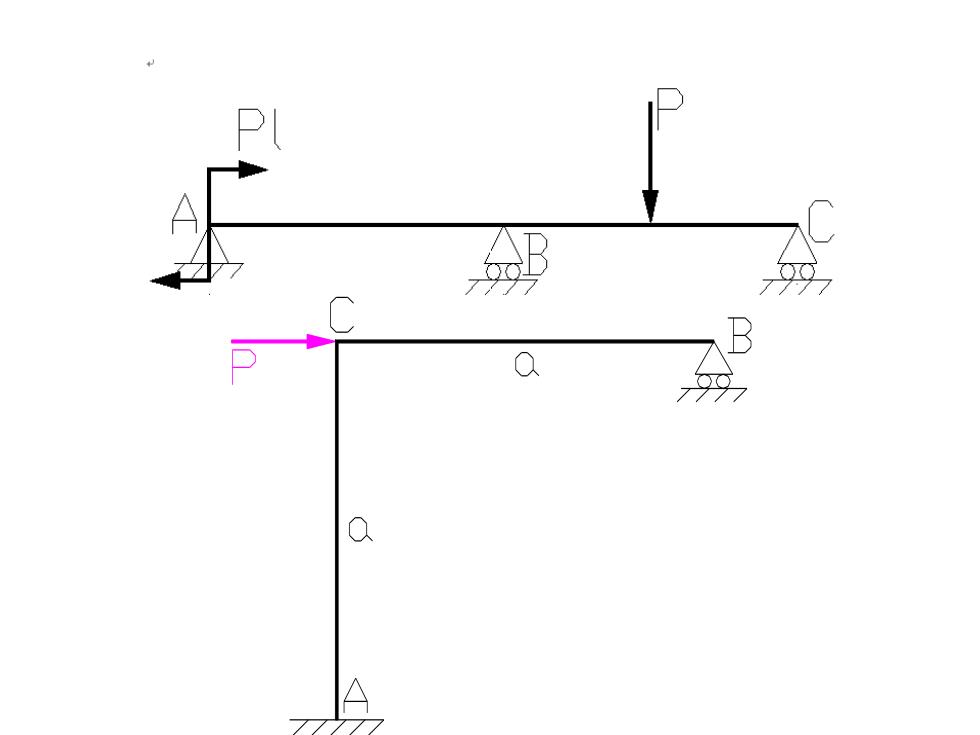
B B A
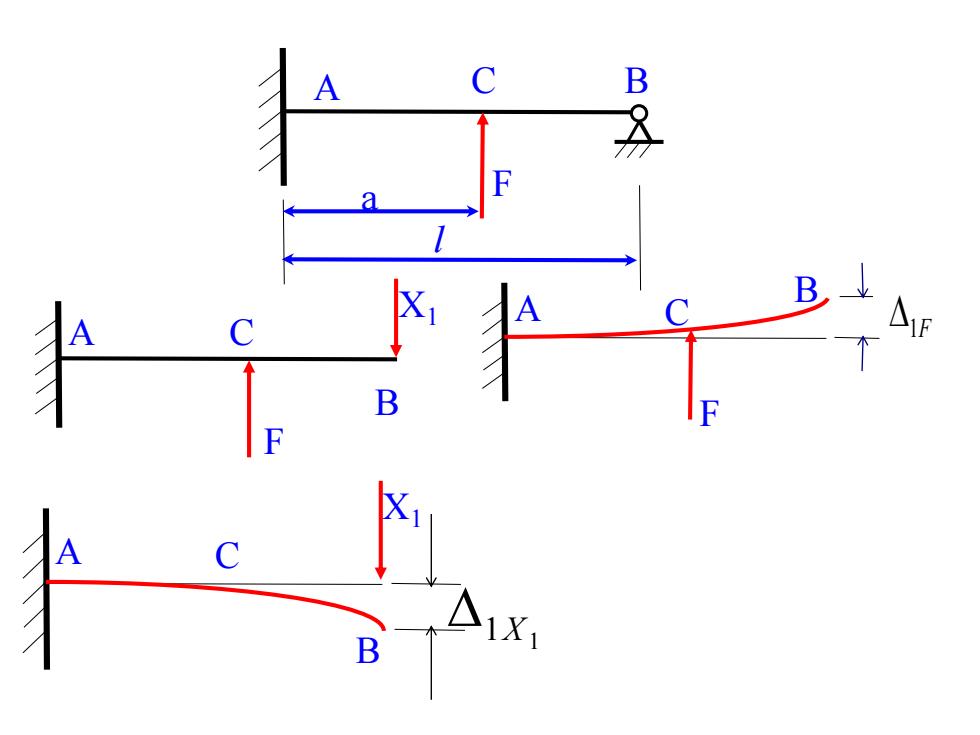
A C B F a l X 1 A B C F A B C F 1 F X 1 A B C 1 X 1
B为支座,因此有 △1=△1F+△1x=0 对于弹性结构,位移与力成正比,X是单位 力的X倍,故△1x也是δ,的X倍,即有 δ11X1+△1F=0
B为支座,因此有 1 = 1F + 1X = 0 对于弹性结构,位移与力成正比,X1是单位 力的X1倍,故 1X1 也是 11 的X1倍,即有 0 11X1 + 1F =