第7章C51应用程序设计7.1步进电机控制器7.2直流电机控制器7.1、步进电机控制器步进电机特点:步进电机能接受步进脉冲的控制一步一步地旋转,用于精确定位场合。复印机,硬盘绕线机,切片机,排线机,包装机械,食品加工行业,雕刻机,医疗器械,舞台灯光,光电子技术,自动化工程,机器人应用等。OA定子ACuuu转子A步进电机工作原理1.步进电机(1)是一个数字/角度转换器,(2)是过程控制及仪表中的主要控制元件。(3)广泛用于定位系统
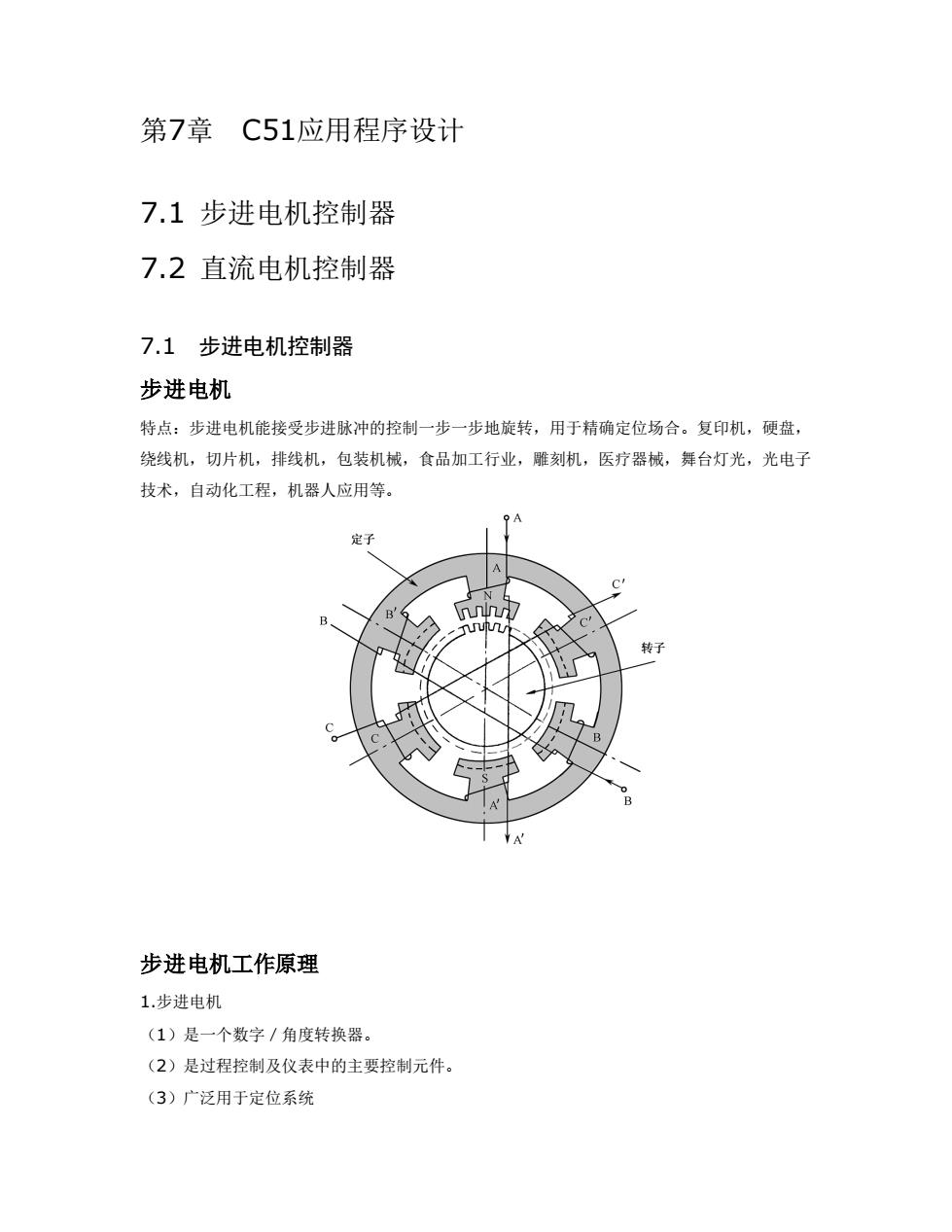
第7章 C51应用程序设计 7.1 步进电机控制器 7.2 直流电机控制器 7.1 步进电机控制器 步进电机 特点:步进电机能接受步进脉冲的控制一步一步地旋转,用于精确定位场合。复印机,硬盘, 绕线机,切片机,排线机,包装机械,食品加工行业,雕刻机,医疗器械,舞台灯光,光电子 技术,自动化工程,机器人应用等。 步进电机工作原理 1.步进电机 (1)是一个数字/角度转换器。 (2)是过程控制及仪表中的主要控制元件。 (3)广泛用于定位系统
2.概念:(1)步进电机旋转的根本原因:错齿。(2)术语:齿距角步距角(3)通电一周,转子转过一个齿距角,N为几,一个齿距角分几步走完。步进电机简述一、步进电机原理以三相,40齿步进电机为例,步进电机的转子上均匀地分布着40个齿,齿间(齿距)夹角为9°(360°/40),定子上有6个大齿,相差180°的两个大齿组成一相,共有A、B、C三相。每个大齿上有若干个与转子上一样的小齿。定子的每一相都有励磁绕组。二、步进电机的运行方式1.三相三拍运行方式C(1)当A相通电时,B相、C相不通电:SA相定子上的齿与转子上的齿对齐(通电后磁场力作用的结果),D迫使电机旋转3B相定子上的齿顺时针超前转子上相应的齿3°4C相定子上的齿顺时针超前转子上相应的齿6°D(2)当B相接通电时,A相、C相不通电:B相齿对齐,电机旋转3°:C相超前3°A相超前6°(3)当C相通电时,B相、A相不通电。C相齿对齐,电机旋转3°:A相超前3°:B相超前6°因此,如果定子A、B、C三相按A-→B→C→A的顺序依次通电,则步进电机将不断地按顺时针方向转动。每一次通电转3°,每三次通电才走完一个齿距,因此叫三相三拍。每一次通电转动的固定角叫步距角α。显然,三相三拍运行时,步距角α=3°。假如某次通电后,控制脉冲不再来,则电机转子齿和某相对齐后就停止转动,叫做位状态。如果把顺时针叫正转,那么当通电顺序按A-C-B→A进行时,则电机反时针旋转,叫反转。可见控制步进电机正转反转只是三相绕组通电顺序不同而已
2. 概念: (1)步进电机旋转的根本原因:错齿。 (2)术语:齿距角步距角 (3)通电一周,转子转过一个齿距角,N 为几,一个齿距角分几步走完。 步进电机简述 一、步进电机原理 以三相,40齿步进电机为例,步进电机的转子上均匀地分布着40个齿,齿间(齿距)夹 角为9°(360°/40),定子上有6个大齿,相差180°的两个大齿组成一相,共有A、B、C 三相。每个大齿上有若干个与转子上一样的小齿。定子的每一相都有励磁绕组。 二、步进电机的运行方式 1.三相三拍运行方式 (1)当A相通电时,B相、C相不通电: A相定子上的齿与转子上的齿对齐(通电后磁场力作用的结果), 迫使电机旋转3° B相定子上的齿顺时针超前转子上相应的齿3° C相定子上的齿顺时针超前转子上相应的齿6° (2)当B相接通电时,A相、C相不通电: B相齿对齐,电机旋转3°;C相超前3°A相超前6° (3)当C相通电时,B相、A相不通电。 C相齿对齐,电机旋转3°;A相超前3°;B相超前6° 因此,如果定子A、B、C三相按 A→B→C→A 的顺序依次通电,则步进电机将不断地按顺时针方向转动。每一次通电转3°,每三次通电 才走完一个齿距,因此叫三相三拍。 每一次通电转动的固定角叫步距角。 显然,三相三拍运 行时,步距角=3°。 假如某次通电后,控制脉冲不再来,则电机转子齿和某相对齐后就停止转动,叫做位状态。 如果把顺时针叫正转,那么当通电顺序按 A→C→B→A 进行时,则电机反时针旋转,叫反转。可见控制步进电机正转反转只是三相绕组通电顺序 不同而已

2.三相六拍运行方式当A相通电时,A相定子齿与转子齿对齐,此后,如果让A、B两相同时通电,可以发现转子转动1.5°。再让A相断电、B相通电,又可发现转子再转1.5°。所以按照A→AB-→B-→BC-C→CA-→A的顺序控制,电机将按顺时针方向旋转,每步转动1.5°,即步距角α=1.5°,由于要经过6步才走完一个齿距(6×1.5°=9°),所以叫三相六拍。如果要使步进电机反转,只要按A-→AC→C→CB-→B→BA顺序通电就行了。结论:从上面两种运行方式可看出,错齿是促使步进电机旋转的根本原因,当某相通电,应的齿对齐,迫使电机旋转一个步距角,未通电的各相的齿出现了新的错位。改变通电的顺序和通电的相数,可组合出其它的运行方式。三、步进电机有如下特点:给步进脉冲电机就转,不给步进脉冲电机就不转:步进脉冲频率高,步进电机转得快:步进脉冲频率低,步进电机转得就慢:改变各相的通电方式(叫脉冲分配)可以改变步进电机的运行方式:改变通电顺序,可以控制步进电机的正、反转。脉冲蜓步进控制器功率放大器负载方向控制步进电机单MM接驱负片机动器-.口载2..用微型机控制步进电机原理系统图
2.三相六拍运行方式 当A相通电时,A相定子齿与转子齿对齐,此后,如果让A、B两相同时通电,可以发现转 子转动1.5°。再让A相断电、B相通电,又可发现转子再转1.5°。所以按照 A→AB→B→BC→C→CA→A 的顺序控制,电机将按顺时针方向旋转,每步转动1.5°,即步距角=1.5°,由于要经 过6步才走完一个齿距(6×1.5°=9°),所以叫三相六拍。如果要使步进电机反转,只 要按 A→AC→C→CB→B→BA 顺序通电就行了。 结论:从上面两种运行方式可看出,错齿是促使步进电机旋转的根本原因,当某相通电,应 的齿对齐,迫使电机旋转一个步距角,未通电的各相的齿出现了新的错位。改变通电的顺序 和通电的相数,可组合出其它的运行方式。 三、步进电机有如下特点: 给步进脉冲电机就转,不给步进脉冲电机就不转; 步进脉冲频率高,步进电机转得快;步进脉冲频率低,步进电机转得就慢; 改变各相的通电方式(叫脉冲分配)可以改变步进电机的运行方式; 改变通电顺序,可以控制步进电机的正、反转。 用微型机控制步进电机原理系统图
1.脉冲序列的生成V脉冲高度O通电时间断电时间脉冲幅值由数字元件电平决定。TTL0~5V接通和断开时间可用定时的办法控制。要求:确保步进到位。步进电机与微型机的接口及程序设计(1)由于步进电机的驱动电流较大,所以微型机与步进电机的连接都需要专门的接口及驱动电路。接口电路可以是锁存器,也可以是可编程接口芯片,如8255、8155等。驱动器可用大功率复合管,也可以是专门的驱动器。光电隔离器,一是抗干扰,二是电隔离
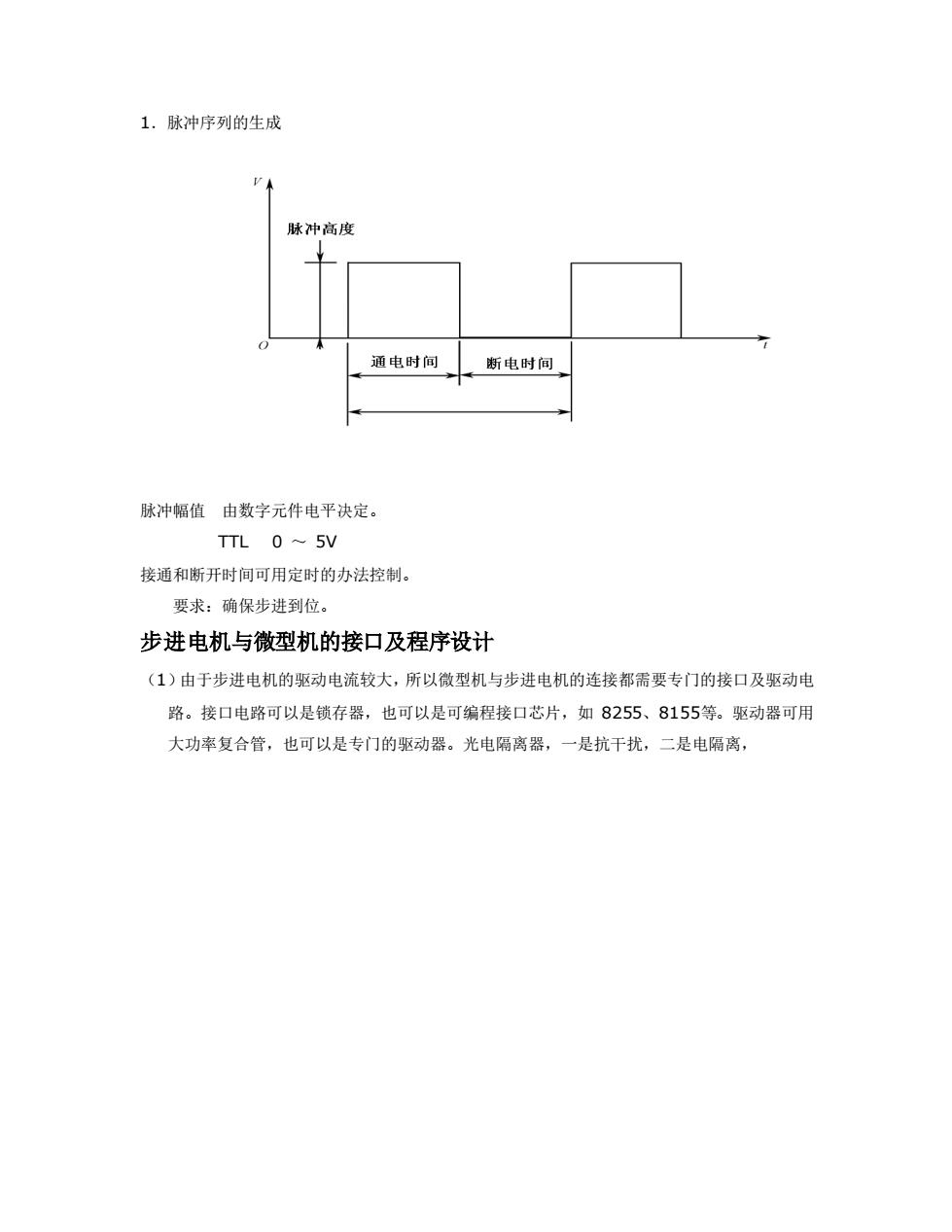
1.脉冲序列的生成 脉冲幅值 由数字元件电平决定。 TTL 0 ~ 5V 接通和断开时间可用定时的办法控制。 要求:确保步进到位。 步进电机与微型机的接口及程序设计 (1)由于步进电机的驱动电流较大,所以微型机与步进电机的连接都需要专门的接口及驱动电 路。接口电路可以是锁存器,也可以是可编程接口芯片,如 8255、8155等。驱动器可用 大功率复合管,也可以是专门的驱动器。光电隔离器,一是抗干扰,二是电隔离
C相R380318051B相R48751P1.R2SA相RP1.0R+12V074LS04按一定的顺序改变P1.0~P1.2三位通电的状况,即可控制步进电机依选定的方向步进。由于步进电机运行时功率较大,可在微型机与驱动器之间增加一级光电隔离器,以防强功率的干扰信号反串进主控系统。805174LSO47.2直流电机控制器一、直流电机变频调速原理
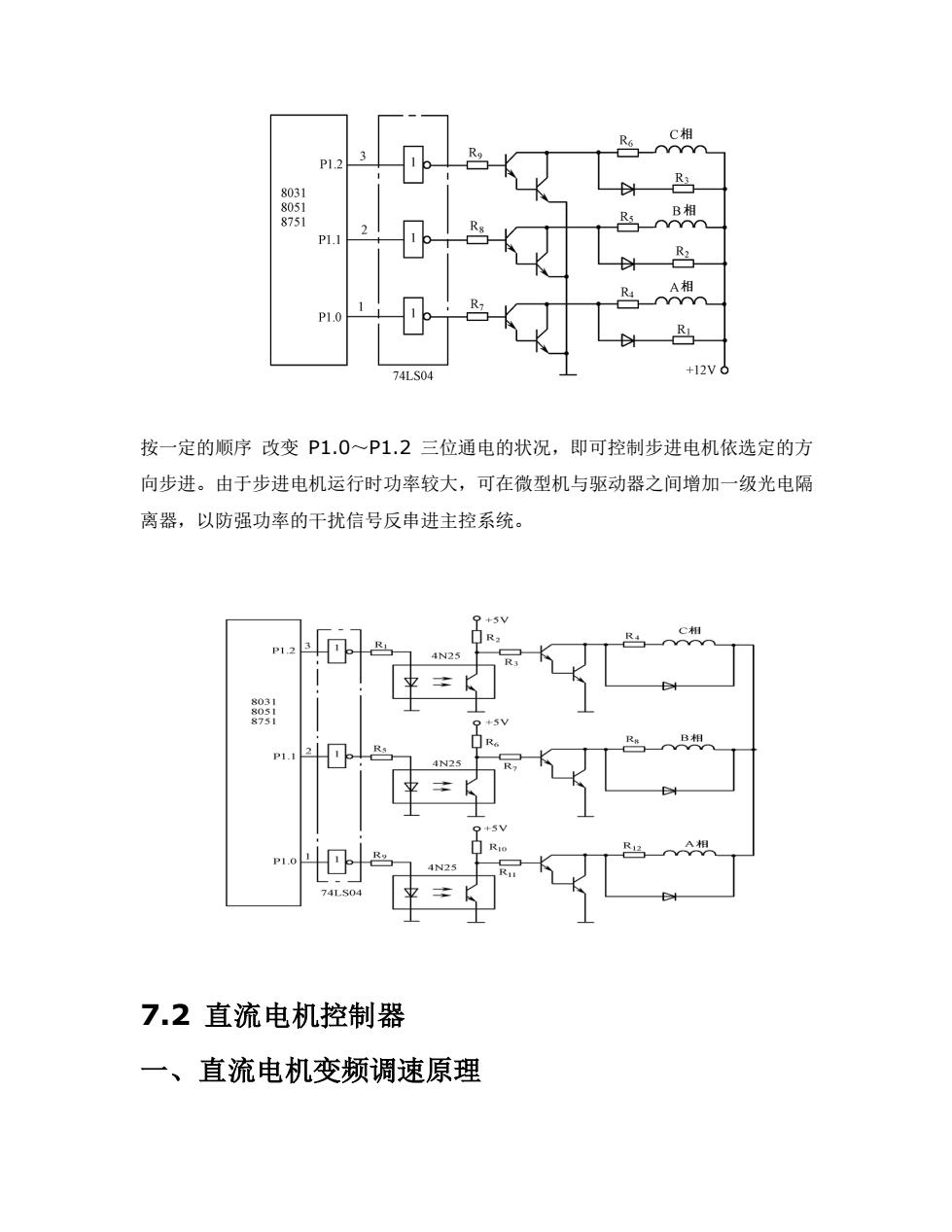
按一定的顺序 改变 P1.0~P1.2 三位通电的状况,即可控制步进电机依选定的方 向步进。由于步进电机运行时功率较大,可在微型机与驱动器之间增加一级光电隔 离器,以防强功率的干扰信号反串进主控系统。 7.2 直流电机控制器 一、直流电机变频调速原理