项目二三相笼型异步电动机正反转控 制 1.电动机正反转控制 2.自动往返行程控制
项目二 三相笼型异步电动机正反转控 制 2.自动往返行程控制 1.电动机正反转控制
知识链接 工作任务一三相笼型异步电动机正反转控制 三相异步电动机工作原理 当三相定子绕组通入三相交流电时,在定子、转子与空 气隙中就会产生一个沿定子内圆旋转的磁场,该磁场称为旋 转磁场。旋转磁场的旋转方向决定于通入定子绕组的三相交 流电源的相序,且与电源的相序一致。当三相定子绕组通入 三相对称交流电后,将产生一个旋转磁场。开始时转子不动, 这样转子导体就会切割磁感应线而产生感应电动势,由于转 子导体自成闭合回路,所以转子导体中就有电流通过,有电 流流过的转子导体将在旋转磁场中受电磁力的作用,该电磁 力在转子轴上形成电磁转矩,使异步电动机的转子旋转。电 动机转子的转向与磁场的旋转方向一致。 >三相异步电动机反转工作原理 三相异步电动机转子的转向与旋转磁场的转向相同, 因此,要使电动机反转只要将接在定子绕组上的任意两根相 线对调即可
工作任务一 三相笼型异步电动机正反转控制 ➢三相异步电动机工作原理 当三相定子绕组通入三相交流电时,在定子、转子与空 气隙中就会产生一个沿定子内圆旋转的磁场,该磁场称为旋 转磁场。旋转磁场的旋转方向决定于通入定子绕组的三相交 流电源的相序,且与电源的相序一致。当三相定子绕组通入 三相对称交流电后,将产生一个旋转磁场。开始时转子不动, 这样转子导体就会切割磁感应线而产生感应电动势,由于转 子导体自成闭合回路,所以转子导体中就有电流通过,有电 流流过的转子导体将在旋转磁场中受电磁力的作用,该电磁 力在转子轴上形成电磁转矩,使异步电动机的转子旋转。电 动机转子的转向与磁场的旋转方向一致。 ➢ 三相异步电动机反转工作原理 三相异步电动机转子的转向与旋转磁场的转向相同, 因此,要使电动机反转只要将接在定子绕组上的任意两根相 线对调即可。 知识链接
基本任务 工作任务一三相笼型异步电动机正反转控制 ★任务要求 能够控制电动机实现正反转,能够实现互锁,如若使电动机由 正向运行转为反向运行,则必须先使电动机停止。 ★任务分析 按照任务要求,需要设置三个控制按钮,分别控制电动机的正 转、反转和停止;需要设置两个接触器,分别控制电动机的正转和反转。 正、反转控制电路分为主电路和控制电路两部分。主电路中的 两个交流接触器M1和KM2分别构成正、反两个相序的电源接线。控制原 理分析:按动正转起动按钮SB1,接触器M1线圈通电自锁,KM1主触点闭 合,电动机正向转动;电动机正转过程中,按动停车按钮SB3,KM1线圈 断电,自锁回路打开,主触点打开,电动机停转。按动反转按钮,交流 接触器KM2线圈通电自锁,K①M2主触点闭合,电动机反向转动。若主电路 中KM1和KM2的主触点同时闭合,将会造成主电路电源短路,因此本电路 任何时刻只允许有一个接触器的触点闭合。实现这一控制要求的方法是 分别将M1,KM2动断触点串接在对方线圈电路中,形成相互制约的关系, 简称为互锁控制(又称联锁控制)
基本任务 工作任务一 三相笼型异步电动机正反转控制 ★任务要求 能够控制电动机实现正反转,能够实现互锁,如若使电动机由 正向运行转为反向运行,则必须先使电动机停止。 ★任务分析 按照任务要求,需要设置三个控制按钮,分别控制电动机的正 转、反转和停止;需要设置两个接触器,分别控制电动机的正转和反转。 正、反转控制电路分为主电路和控制电路两部分。主电路中的 两个交流接触器KM1和KM2分别构成正、反两个相序的电源接线。控制原 理分析:按动正转起动按钮SB1,接触器KM1线圈通电自锁,KM1主触点闭 合,电动机正向转动;电动机正转过程中,按动停车按钮SB3,KM1线圈 断电,自锁回路打开,主触点打开,电动机停转。按动反转按钮,交流 接触器KM2线圈通电自锁,KM2主触点闭合,电动机反向转动。若主电路 中KM1和KM2的主触点同时闭合,将会造成主电路电源短路,因此本电路 任何时刻只允许有一个接触器的触点闭合。实现这一控制要求的方法是 分别将KM1,KM2动断触点串接在对方线圈电路中,形成相互制约的关系, 简称为互锁控制(又称联锁控制)
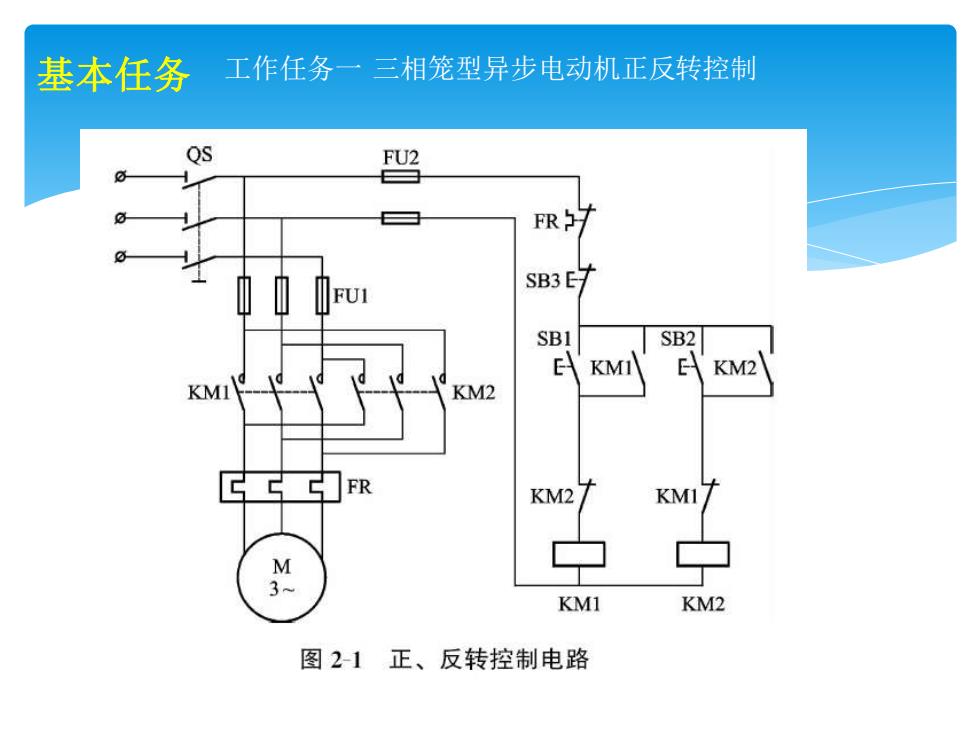
基本任务 工作任务一三相笼型异步电动机正反转控制 FU2 FR SB3E7 SB1 SB2 E KMI KM2 KMI KM2 CCCFR KM2 KM M KM1 KM2 图21正、反转控制电路
基本任务 工作任务一 三相笼型异步电动机正反转控制
拓展任务 :工作任务一三相笼型异步电动机正反转控制 >任务要求: 能够控制电动机实现正反转,能够实现互锁,能够使电动机 由正向运行直接切换为反向运行。 >任务分析: 按照任务要求,需要设置三个控制按钮,分别控制电动机的 正转、反转和停止,并且正、反转控制按钮需要有联动触点; 需要设置两个接触器,分别控制电动机的正转和反转。将正、 反转按钮的动断触点串到对方电路中,利用按钮动合、动断触 点的机械连接,在电路中起相互制约的联锁作用
拓展任务 工作任务一 三相笼型异步电动机正反转控制 ➢任务要求: 能够控制电动机实现正反转,能够实现互锁,能够使电动机 由正向运行直接切换为反向运行。 ➢任务分析: 按照任务要求,需要设置三个控制按钮,分别控制电动机的 正转、反转和停止,并且正、反转控制按钮需要有联动触点; 需要设置两个接触器,分别控制电动机的正转和反转。将正、 反转按钮的动断触点串到对方电路中,利用按钮动合、动断触 点的机械连接,在电路中起相互制约的联锁作用