第四章 大田生物生产机器人 而千大9 China Agricultural University
China Agricultural University 第四章 大田生物生产机器人
内容 第1节葡萄收获机器人 第2节柑橘收获机器人 第3节苹果收获机器人 第4节西瓜收获机器人 第5节甘蓝收获机器人 第6节林业机器人 第7节多功能机器人 个大大超 第8节作物保护机器人 China Agr
China Agricultural University 内容 第1节葡萄收获机器人 第2节柑橘收获机器人 第3节苹果收获机器人 第4节西瓜收获机器人 第5节甘蓝收获机器人 第6节林业机器人 第7节多功能机器人 第8节作物保护机器人
第1节 葡萄收获机器人 中而f大9 China Agricultural University
China Agricultural University 第1节 葡萄收获机器人
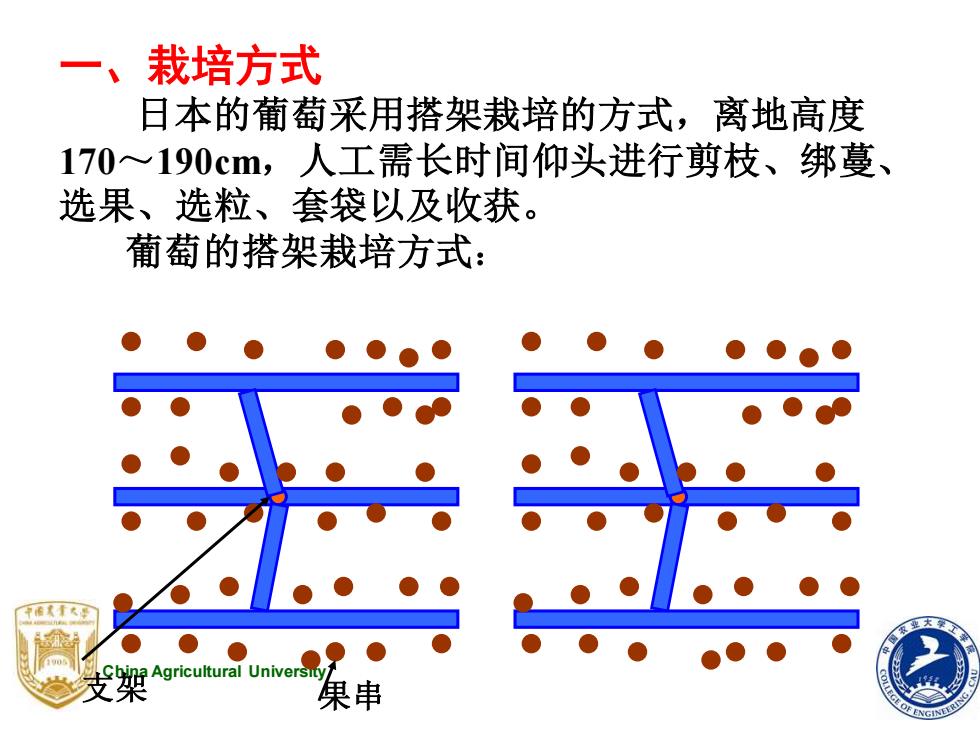
一、 栽培方式 日本的葡萄采用搭架栽培的方式,离地高度 170~190cm,人工需长时间仰头进行剪枝、绑蔓、 选果、选粒、套袋以及收获。 葡萄的搭架栽培方式: 。 个传大于大好 果串
China Agricultural University 一、栽培方式 日本的葡萄采用搭架栽培的方式,离地高度 170~190cm,人工需长时间仰头进行剪枝、绑蔓、 选果、选粒、套袋以及收获。 葡萄的搭架栽培方式: 支架 果串

二、5自由度葡萄收获机器人 守顺人f大 China Agricultural University
China Agricultural University 二、5自由度葡萄收获机器人