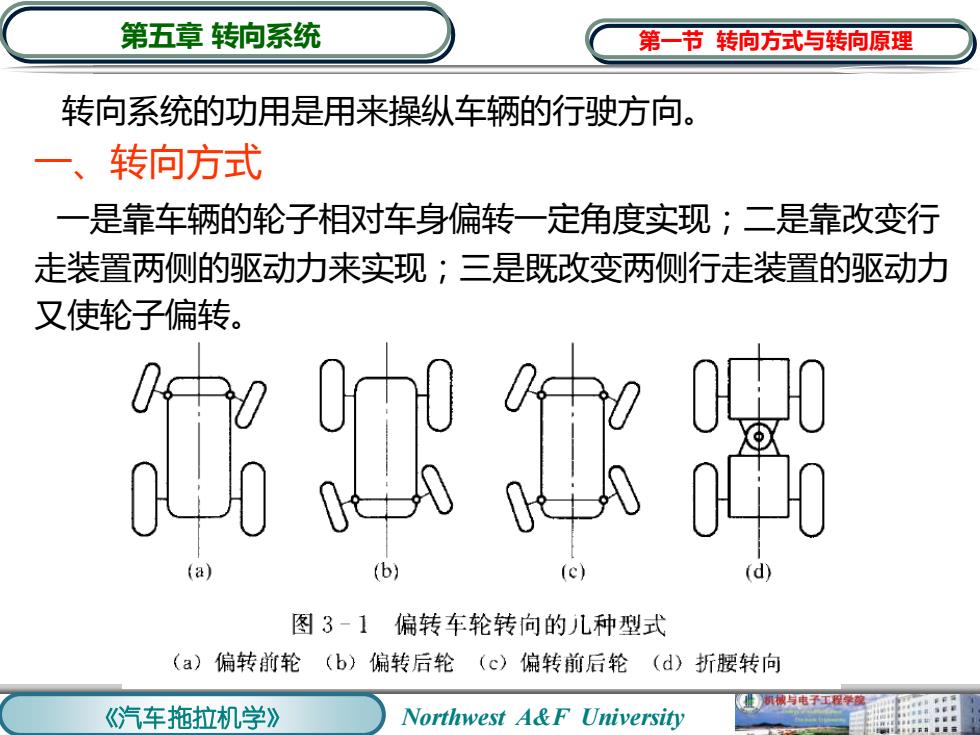
第五章转向系统 第一节转向方式与转向原理 转向系统的功用是用来操纵车辆的行驶方向。 一、转向方式 一是靠车辆的轮子相对车身偏转一定角度实现;二是靠改变行 走装置两侧的驱动力来实现;三是既改变两侧行走装置的驱动力 又使轮子偏转。 牌 (b)】 (c) 图3-1偏转车轮转向的儿种型式 (a)偏转前轮(b)偏转后轮(c)偏转前后轮(d)折腰转向 析城与电子工检学 《汽车拖拉机学》 Northwest A&F University
《汽车拖拉机学》 Northwest A&F University 第五章 转向系统 转向系统的功用是用来操纵车辆的行驶方向。 一、转向方式 一是靠车辆的轮子相对车身偏转一定角度实现;二是靠改变行 走装置两侧的驱动力来实现;三是既改变两侧行走装置的驱动力 又使轮子偏转。 第一节 转向方式与转向原理
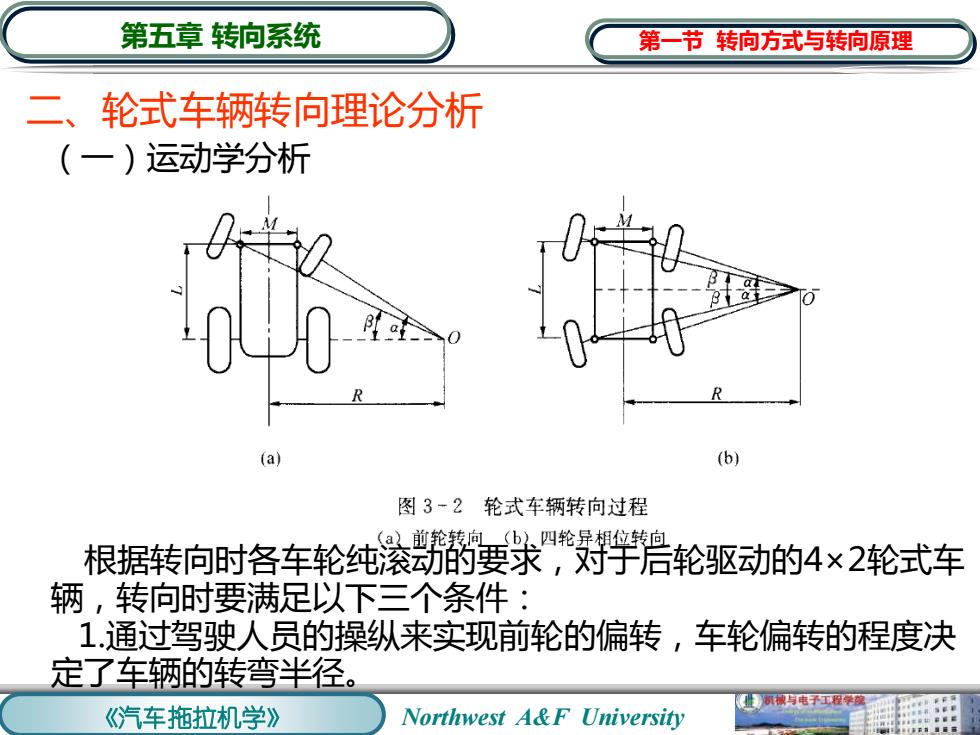
第五章转向系统 第一节转向方式与转向原理 二、轮式车辆转向理论分析 (一)运动学分析 (b) 图3-2轮式车辆转向过程 根据转向时各车轮纯韵要求”,对群撸轮驱动的4×2轮式车 辆,转向时要满足以下三个条件: 1.通过驾驶人员的操纵来实现前轮的偏转,车轮偏转的程度决 定了车辆的转弯半径 机与电子工程学 《汽车拖拉机学》 Northwest A&F University
《汽车拖拉机学》 Northwest A&F University 第五章 转向系统 二、轮式车辆转向理论分析 (一)运动学分析 根据转向时各车轮纯滚动的要求,对于后轮驱动的4×2轮式车 辆,转向时要满足以下三个条件: 1.通过驾驶人员的操纵来实现前轮的偏转,车轮偏转的程度决 定了车辆的转弯半径。 第一节 转向方式与转向原理
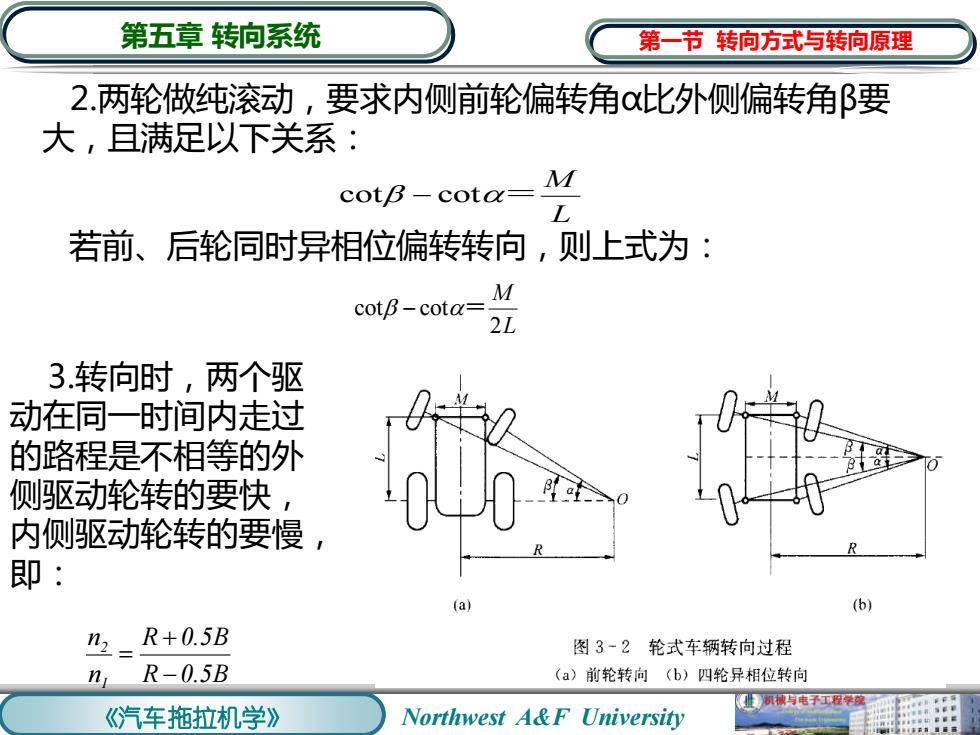
第五章转向系统 第一节转向方式与转向原理 2.两轮做纯滚动,要求内侧前轮偏转角比外侧偏转角β要 大,且满足以下关系: cotB-cota= M 若前、后轮同时异相位偏转转向,则上式为: M cotB-cota= 21 3.转向时,两个驱 动在同一时间内走过 的路程是不相等的外 侧驱动轮转的要快, 内侧驱动轮转的要慢, 即: (b) R+0.5B 图3-2轮式车辆转向过程 n R-0.5B (a)前轮转向(b)四轮异相位转向 机被与电子工程学强 《汽车拖拉机学》 Northwest A&F University
《汽车拖拉机学》 Northwest A&F University 第五章 转向系统 L M 2 cot − cot= 2.两轮做纯滚动,要求内侧前轮偏转角α比外侧偏转角β要 大,且满足以下关系: L M cot − cot= 若前、后轮同时异相位偏转转向,则上式为: 3.转向时,两个驱 动在同一时间内走过 的路程是不相等的外 侧驱动轮转的要快, 内侧驱动轮转的要慢, 即: R 0.5B R 0.5B n n 1 2 − + = 第一节 转向方式与转向原理
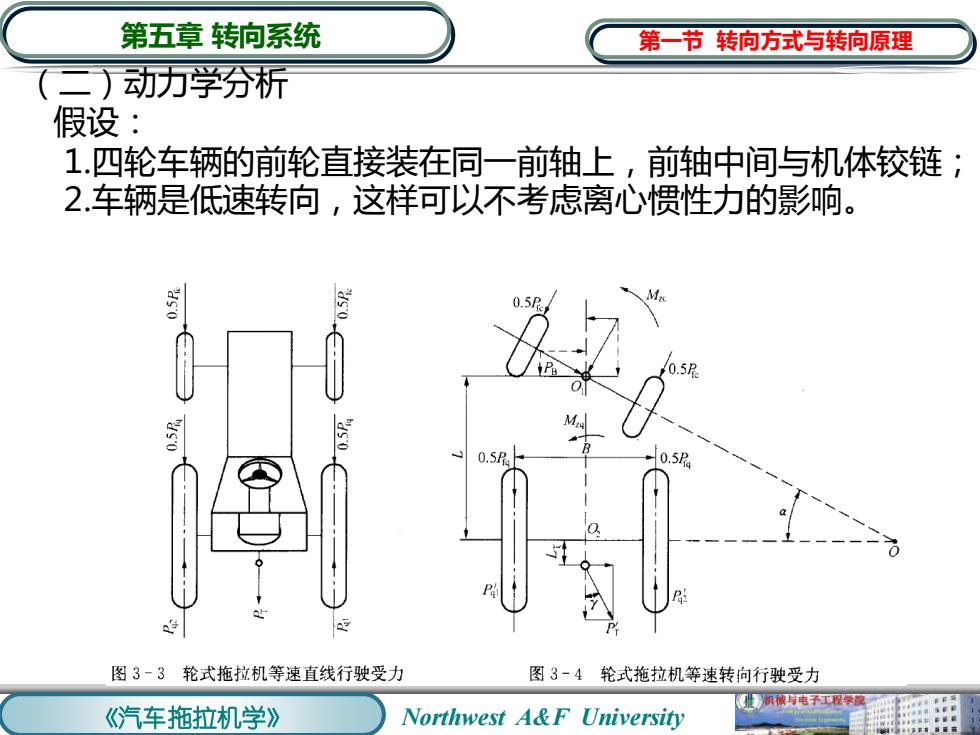
第五章转向系统 第一节转向方式与转向原理 (二)动力学分析 假设: 1.四轮车辆的前轮直接装在同一前轴上,前轴中间与机体铰链; 2车辆是低速转向,这样可以不考虑离心惯性力的影响。 15月 0.5 图3-3轮式拖拉机等速直线行驶受力 图3-4轮式拖拉机等速转向行驶受力 机械与电子工程学 《汽车拖拉机学》 Northwest A&F University
《汽车拖拉机学》 Northwest A&F University 第五章 转向系统 (二)动力学分析 假设: 1.四轮车辆的前轮直接装在同一前轴上,前轴中间与机体铰链; 2.车辆是低速转向,这样可以不考虑离心惯性力的影响。 第一节 转向方式与转向原理
第五章转向系统 第一节转向方式与转向原理 车辆前行时,其牵引力平衡方程式为: Pa=Pal+Pa2=Pre+Pla+Pr 转向时的牵引力平衡方程式为: P=P+Prcosa+Pasina+P'cosy 车辆转向时,土壤作用于车辆,并且相对于Q2点的总转向阻力 矩为各项阻力矩之和; M=M:e M:g+PiLrsiny+LPrsin a 车辆转向时的,地面作用于车轮的转向力矩为: MB =0.5B(P92-P)+LPacosa 假设P2则上式可写为: M LPBcosa 根据稳定转向的条件,转向力矩与转向阻力矩相平衡,即: MB=MΣ LPecosa=M-c+M-+P'Lrsiny+LPresina 【机城与电子工程学 《汽车拖拉机学》 Northwest A&F University
《汽车拖拉机学》 Northwest A&F University 第五章 转向系统 Pq = Pq1 + Pq2 = Pf c + Pf q + PT 车辆前行时,其牵引力平衡方程式为: 转向时的牵引力平衡方程式为: P P P cosα P sinα P cosγ q f q f c B T = + + + 车辆转向时,土壤作用于车辆,并且相对于Q2点的总转向阻力 矩 为各项阻力矩之和; M M = M z c + M z q + PT LT sinγ + LPf csin 车辆转向时的,地面作用于车轮的转向力矩为: MB = 0.5B(Pq 2 − Pq 1 ) + LPB cos 假设 Pq2 ,则上式可写为: Pq1 = MB = LPB cos 根据稳定转向的条件,转向力矩与转向阻力矩相平衡,即: MB = M LPB cosα = Mz c + Mz q + PT LT sinγ + LPf csinα 第一节 转向方式与转向原理