上游充通大学 SHANGHAI JIAO TONG UNIVERSITY 数字PID控制算法参考资料 分86 O101001009 1001000m 强 /0100 710616 LAMAMAAMA SHANG 1日日
数字PID控制算法参考资料
上降充通大学 SHANGHAI JIAO TONG UNIVERSITY PD调节器参数选择 PID整定的理论方法 一通过调整PID的三个参数K2T、TD,将系统的闭环 特征根分布在S域的左半平面的某一特定域内,以保 证系统具有足够的稳定裕度并满足给定的性能指标 一只有被控对象的数学模型足够精确时,才能把特征 根精确地配置在期望的位置上,而大多数实际系统一 般无法得到系统的精确模型,因此理论设计的极点配 置往往与实际系统不能精确匹配
PID调节器参数选择 PID整定的理论方法 — 通过调整PID的三个参数KP、 TI、 TD ,将系统的闭环 特征根分布在 s 域的左半平面的某一特定域内,以保 证系统具有足够的稳定裕度并满足给定的性能指标 — 只有被控对象的数学模型足够精确时,才能把特征 根精确地配置在期望的位置上,而大多数实际系统一 般无法得到系统的精确模型,因此理论设计的极点配 置往往与实际系统不能精确匹配
上游充通大学 SHANGHAI JLAO TONG UNIVERSITY PID调节器参数选择(2) 试凑法确定PID调节参数 ◆通过模拟或闭环运行观察系统的响应曲线,然后根据各 环节参数对系统响应的大致影响,反复凑试参数,以达 到满意的响应,从而确定PD参数 ◆K增大,系统响应加快,静差减小,但系统振荡增强, 稳定性下降;T增大,系统超调减小,振荡减弱,但系统 静差的消除也随之减慢;T增大,调节时间减小,快速 性增强,系统振荡减弱,稳定性增强,但系统对扰动的 抑制能力减弱
PID调节器参数选择(2) 试凑法确定PID调节参数 ◆ 通过模拟或闭环运行观察系统的响应曲线,然后根据各 环节参数对系统响应的大致影响,反复凑试参数,以达 到满意的响应,从而确定PID参数 ◆ Kp增大,系统响应加快,静差减小,但系统振荡增强, 稳定性下降;Ti增大,系统超调减小,振荡减弱,但系统 静差的消除也随之减慢;Td增大,调节时间减小,快速 性增强,系统振荡减弱,稳定性增强,但系统对扰动的 抑制能力减弱

上游充通大学 SHANGHAI JLAO TONG UNIVERSITY PID调节器参数选择(3) 在凑试时,可参考以上参数分析控制过程的影响趋势,对 参数进行先比例,后积分,再微分的整定步骤,步骤如 下: 一整定比例部分 一如果仅调节比例调节器参数,系统的静差还达不到设 计要求时,则需加入积分环节 一若使用比例积分器,能消除静差,但动态过程经反复 调整后仍达不到要求,这时可加入微分环节
PID调节器参数选择(3) ◆ 在凑试时,可参考以上参数分析控制过程的影响趋势,对 参数进行先比例,后积分,再微分的整定步骤,步骤如 下: — 整定比例部分 — 如果仅调节比例调节器参数,系统的静差还达不到设 计要求时,则需加入积分环节 — 若使用比例积分器,能消除静差,但动态过程经反复 调整后仍达不到要求,这时可加入微分环节
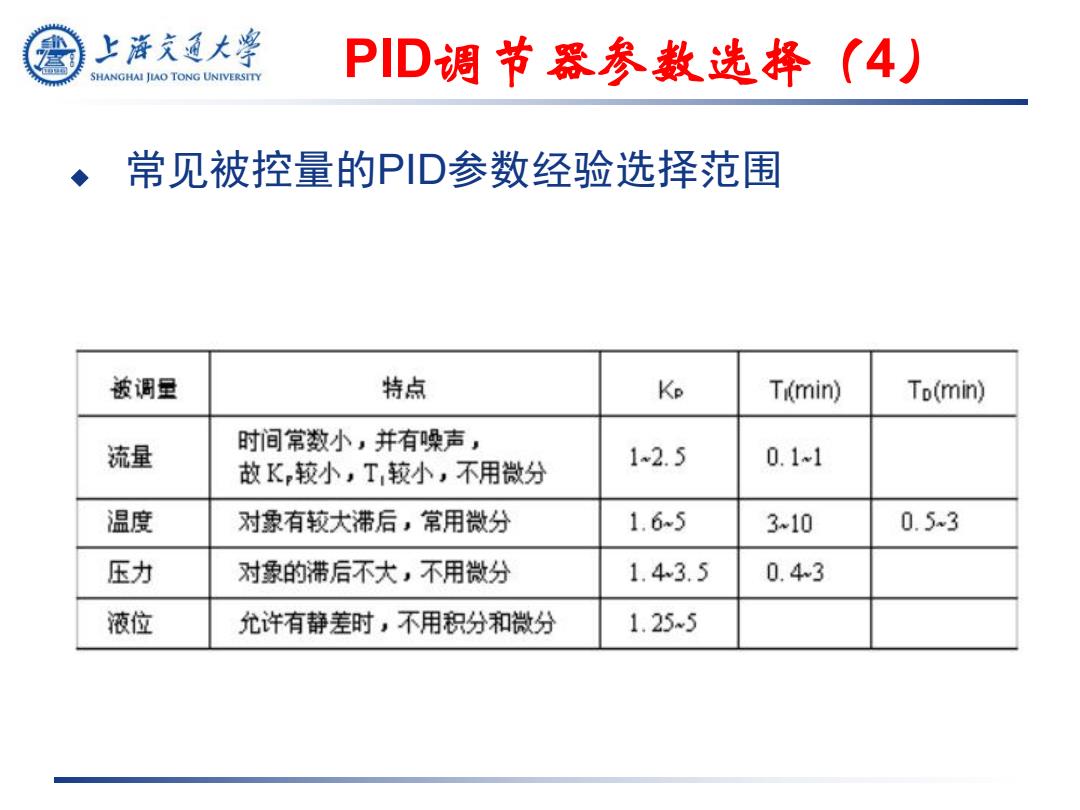
上降充通大学 SHANGHAI JIAO TONG UNIVERSITY PID调节器参数选择(4) 常见被控量的PD参数经验选择范围 被调量 特点 Kp TK(min) To(min) 流量 时间常数小,并有噪声, 故K,较小,T较小,不用微分 12.5 0.11 温度 对象有较大滞后,常用微分 1.65 3-10 0.53 压力 对象的滞后不大,不用微分 1.43.5 0.43 液位 允许有静差时,不用积分和微分 1.25-5
PID调节器参数选择(4) ◆ 常见被控量的PID参数经验选择范围