细台形2幸院 antai Institute of Technology 原城台家父维缆 第三章机器人的运动学 四3.1导读 四3.2顺向运动学 四3.3逆向运动学 22
22 3.1 导读 3.2 顺向运动学 3.3 逆向运动学 第三章 机器人的运动学
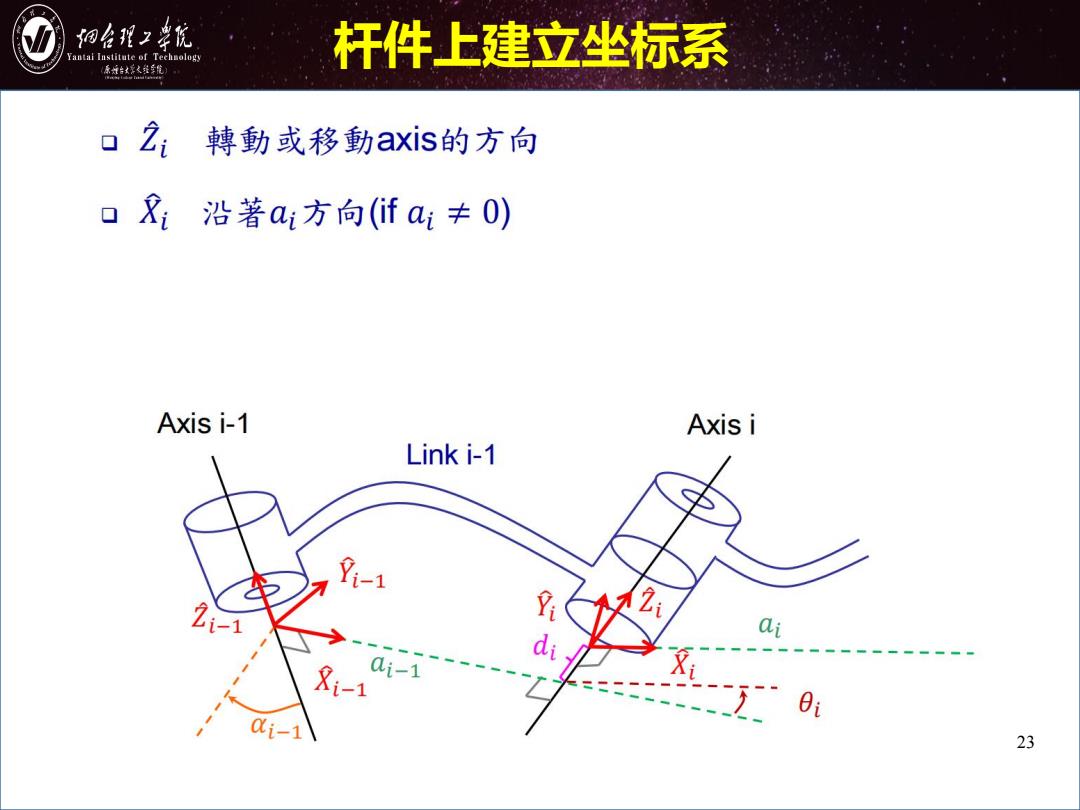
细台形z幸院 antai Institute of Technology 杆件上建立坐标系 原城台好火维年院 口2:轉動或移動axis的方向 口8沿著ai方向(ifa:≠0) Axis i-1 Axis i Link i-1 21 ai d 8-1 i-1 01 i-1\V 23
23 杆件上建立坐标系
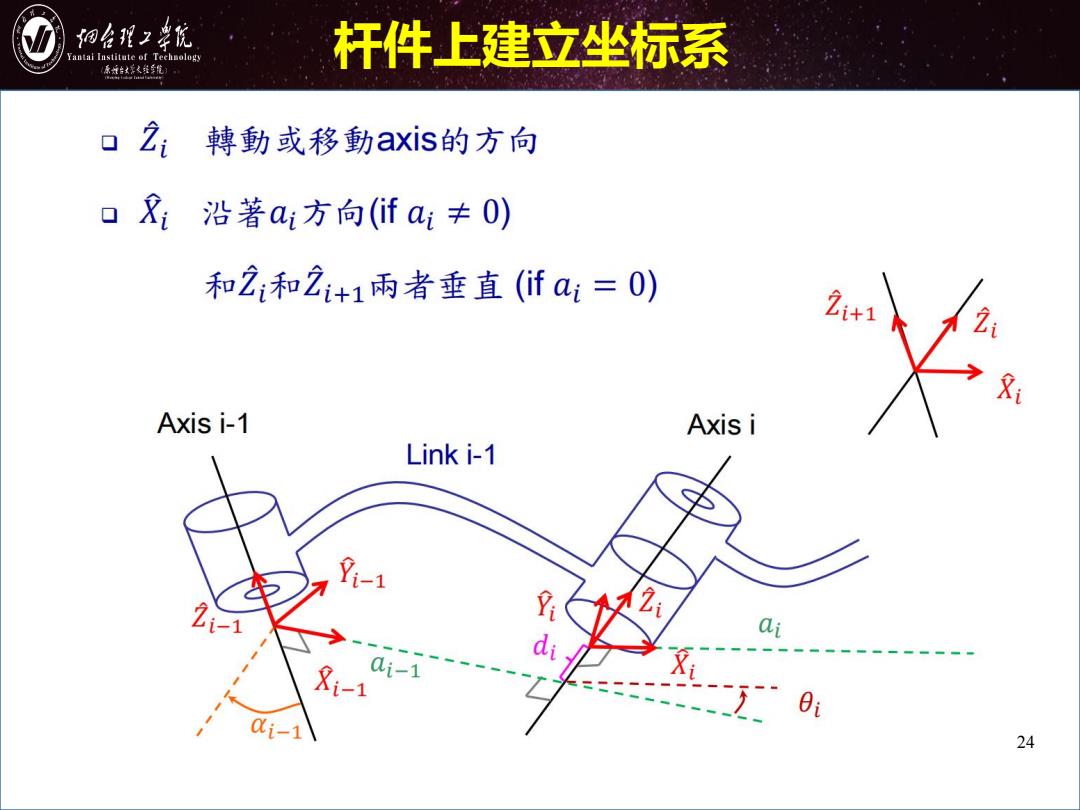
细台形z幸院 antai Institute of Technology 杆件上建立坐标系 原城台好火维年院 口2:轉動或移動axis的方向 口8;沿著a:方向(ifa:≠0) 和2和2+1两者垂直(ifa:=0) Axis i-1 Axis i Link i-1 2: ai d, 8i-1 i-1 0 i-1\ 24
24 杆件上建立坐标系
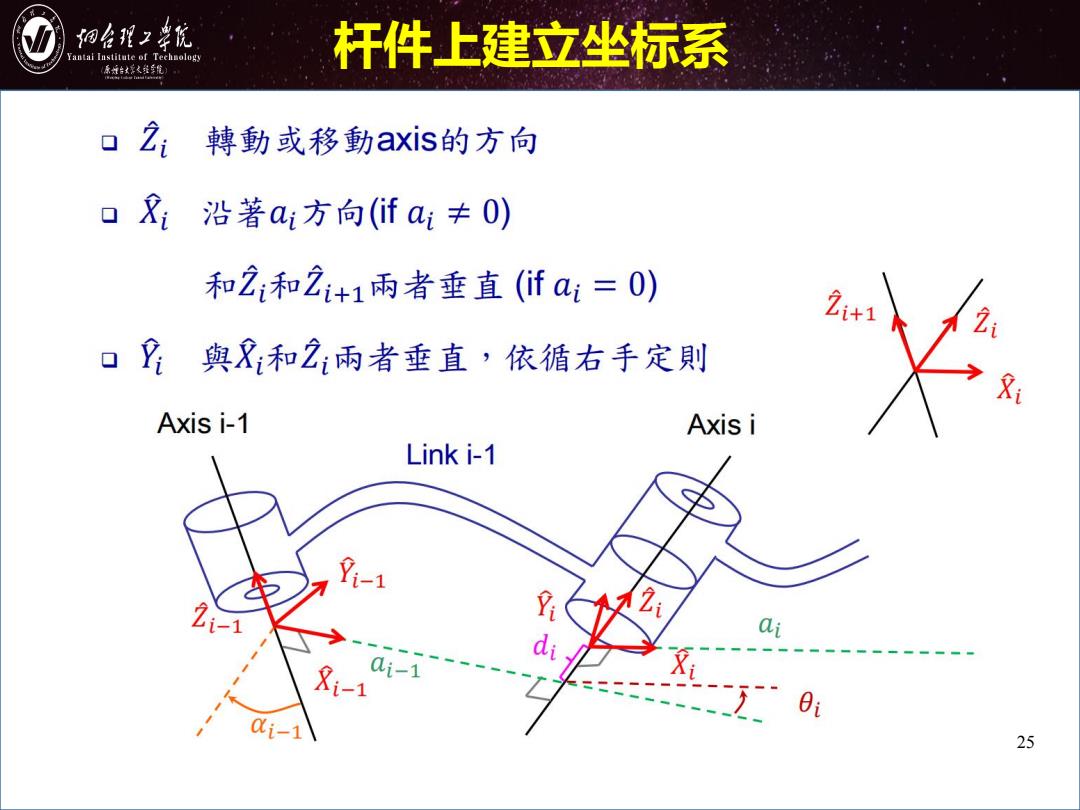
细台形z幸院 antai Institute of Technology 杆件上建立坐标系 原城台好火维年院 o2: 轉動或移動axis的方向 口8;沿著a:方向(ifa:≠0) 和2:和2+1雨者垂直(ifa=0) 口P與8和2:雨者垂直’依循右手定則 Axis i-1 Axis i Link i-1 21 ai d, 8-1 i-1 0 i-1\V 25
25 杆件上建立坐标系
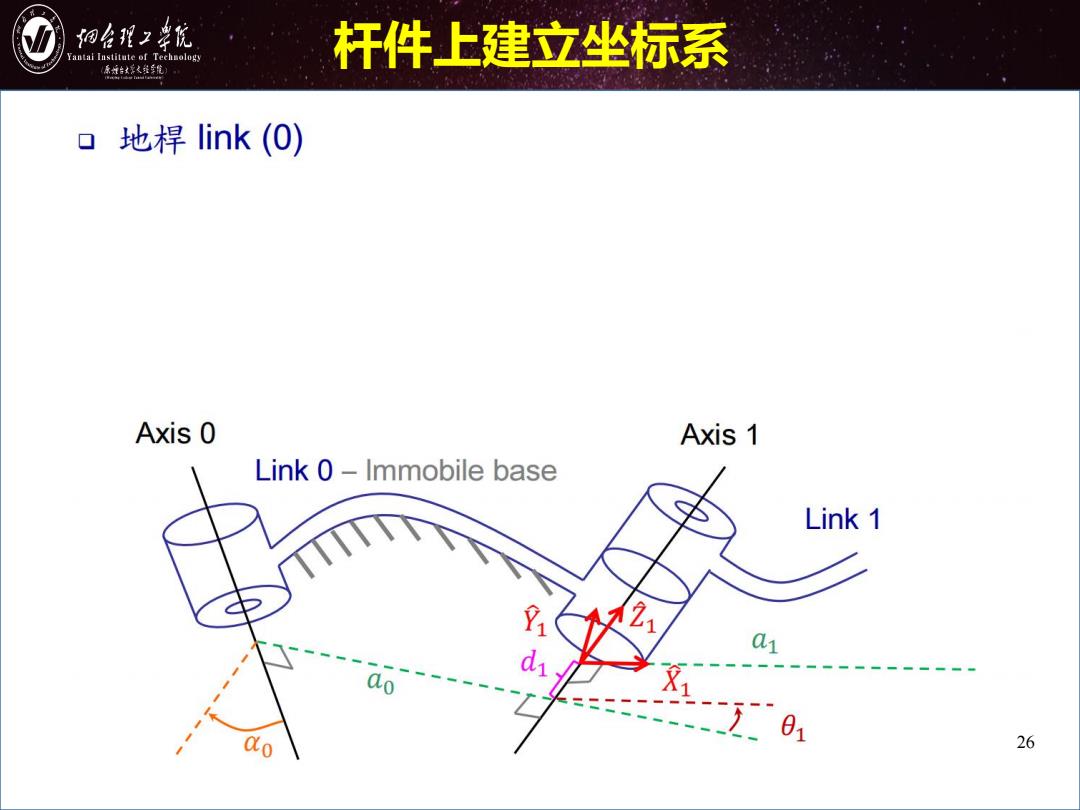
细台形2幸院 Yantai Institute of Technology 杆件上建立坐标系 原城台好父维年航 0 地桿link(O) Axis 0 Axis 1 Link 0-Immobile base Link 1 21 01 101 00 26
26 杆件上建立坐标系