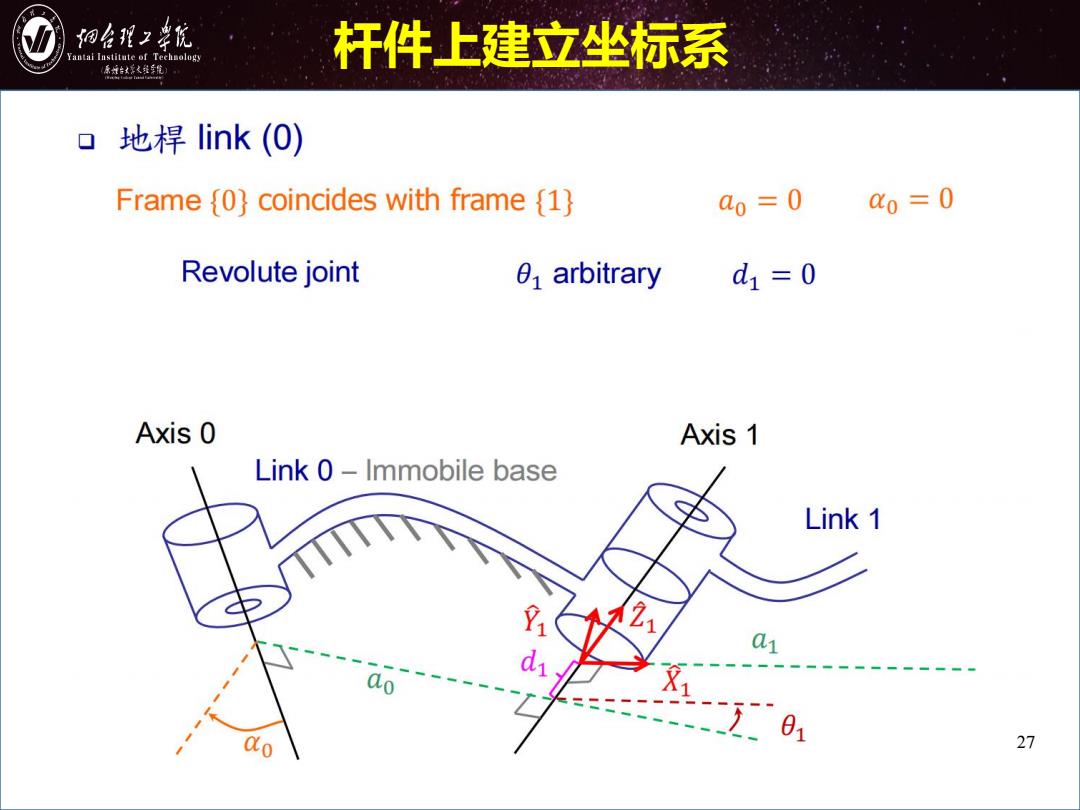
细台程2幸优 antai Institute of Technology 杆件上建立坐标系 原城台好父维年航 地桿link(O) Frame (0}coincides with frame {1) a0=0 00=0 Revolute joint 01 arbitrary d1=0 Axis 0 Axis 1 Link 0-Immobile base Link 1 21 01 X1 0 do 27
27 杆件上建立坐标系
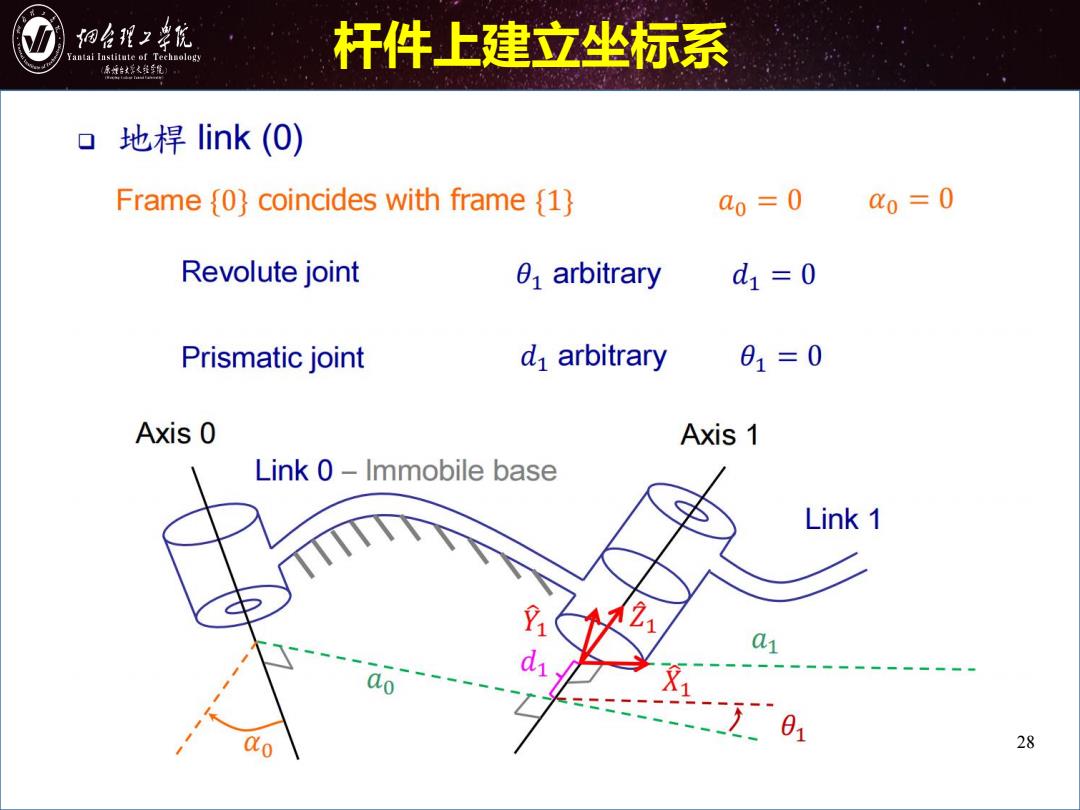
细台形2幸院 antai Institute of Technology 杆件上建立坐标系 原城台好火维年馆 o地桿link(O) Frame (0}coincides with frame (1) a0=0 a0=0 Revolute joint 01 arbitrary d1=0 Prismatic joint di arbitrary 01=0 Axis 0 Axis 1 Link 0-Immobile base Link 1 21 01 X1 0 28
28 杆件上建立坐标系
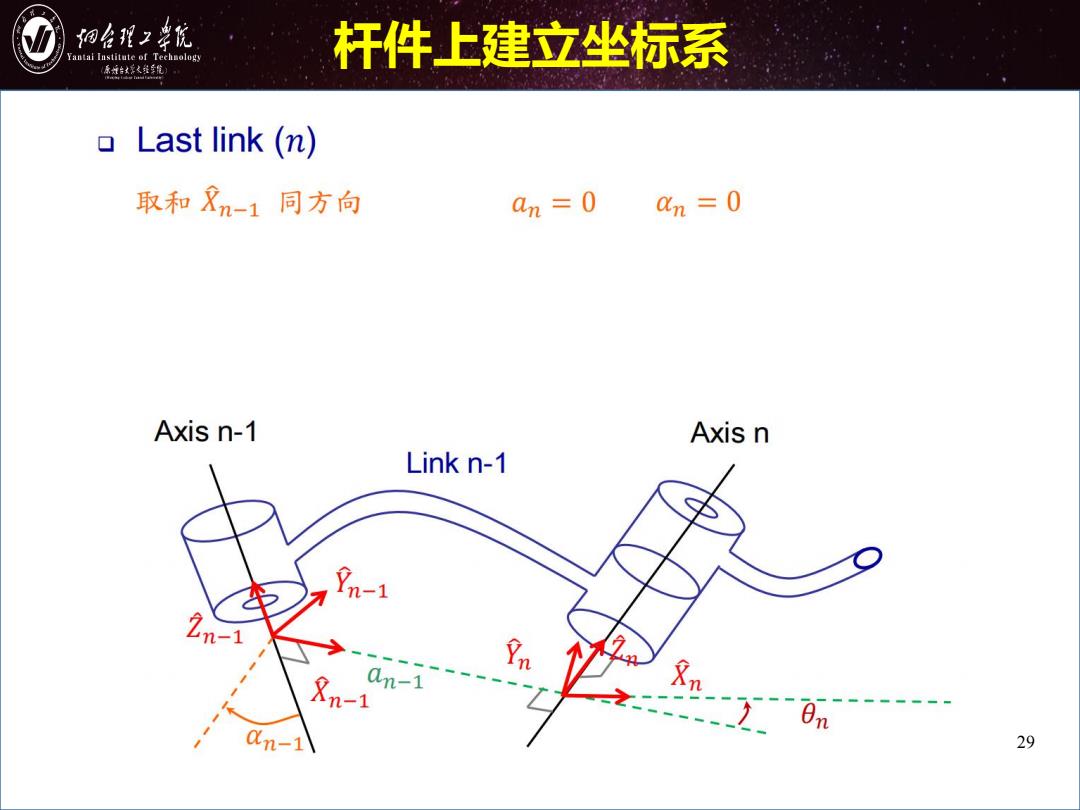
细台程2幸优 Yantai Institute of Technology 杆件上建立坐标系 原城台好火维年院 Last link(n) 取和8n-1同方向 an =0 an =0 Axis n-1 Axis n Link n-1 n-1 n-1 0n-1 29
29 杆件上建立坐标系
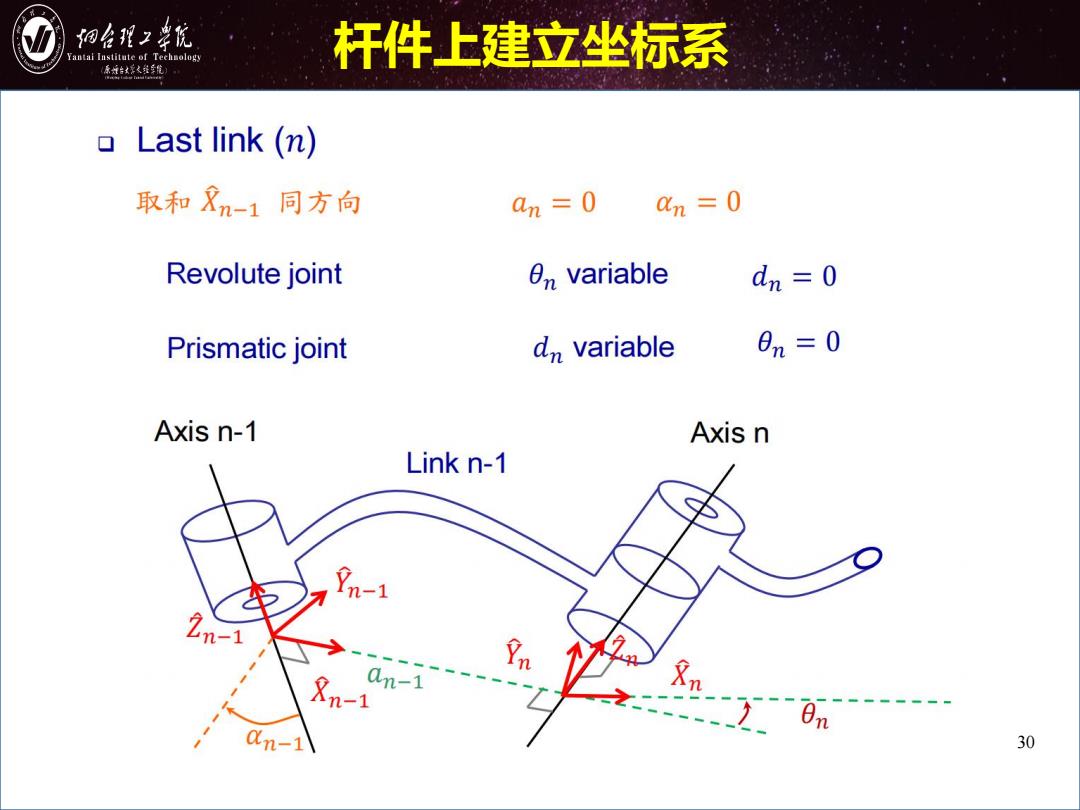
细台程2幸优 antai Institute of Technology 杆件上建立坐标系 原城台好火维年航 ▣Last link(m) 取和8n-1 同方向 an =0 an =0 Revolute joint e variable dn =0 Prismatic joint dn variable 0n=0 Axis n-1 Axis n Link n-1 n-1 0n-1 30
30 杆件上建立坐标系
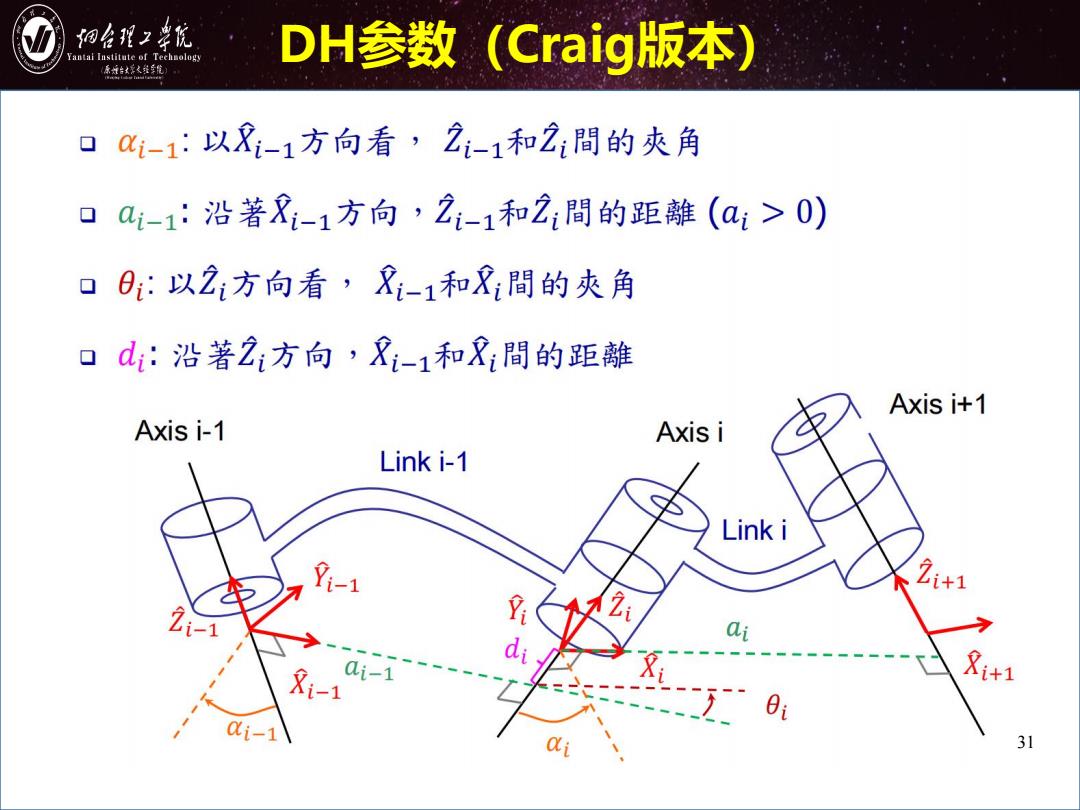
细台程2幸优 Yantai Institute of Technology DH参数 (Craig版本) 原城台好火维年馆 Q1-1:以8-1方向看,2:-1和2:間的夹角 a1-1:沿著8-1方向,2:-1和2:間的距離(a:>0) o 0:以2:方向看,8-1和8間的夹角 0 d:沿著Z:方向,8-1和8間的距離 Axis i+1 Axis i-1 Axis i Link i-1 Link i Yi-1 i+1 2 ai 8-1 i- 8i+1 0i-1 ai 31
31 DH参数(Craig版本)