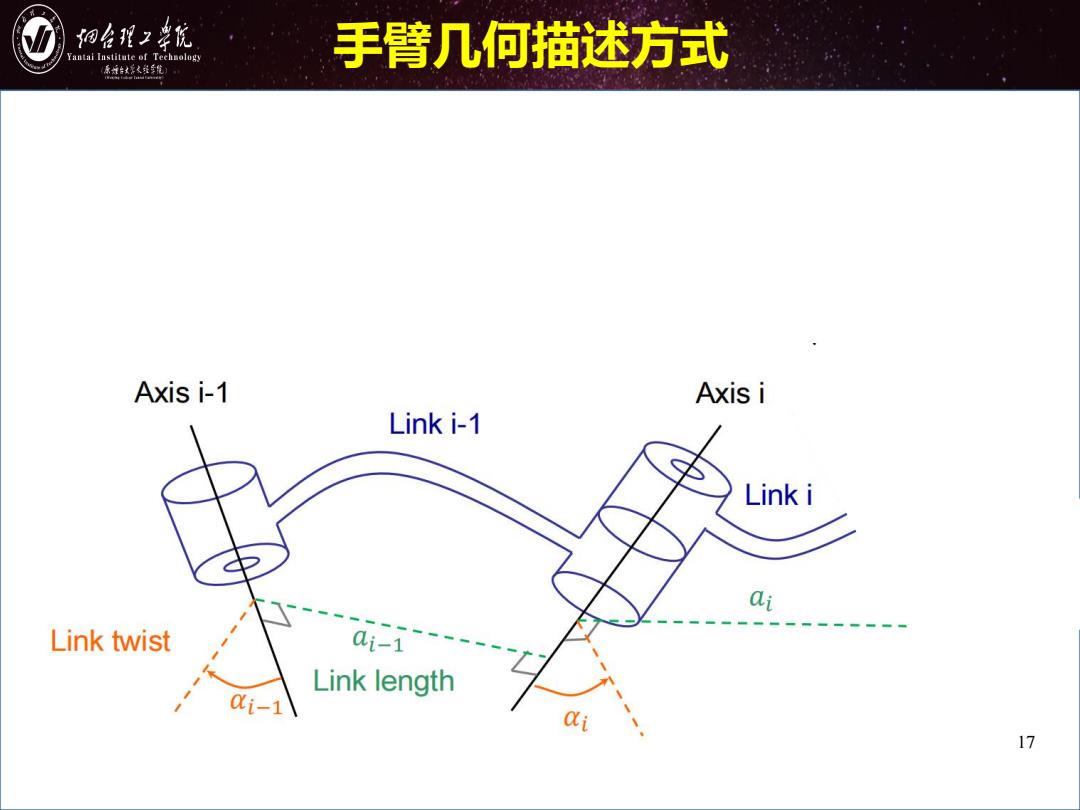
细台程2幸优 Yantai Institute of Technology 手臂几何描述方式 原城台家之维年能 Axis i-1 Axis i Link i-1 Link i ai Link twist ai-1 Link length 0i-1 ai 17
17 手臂几何描述方式
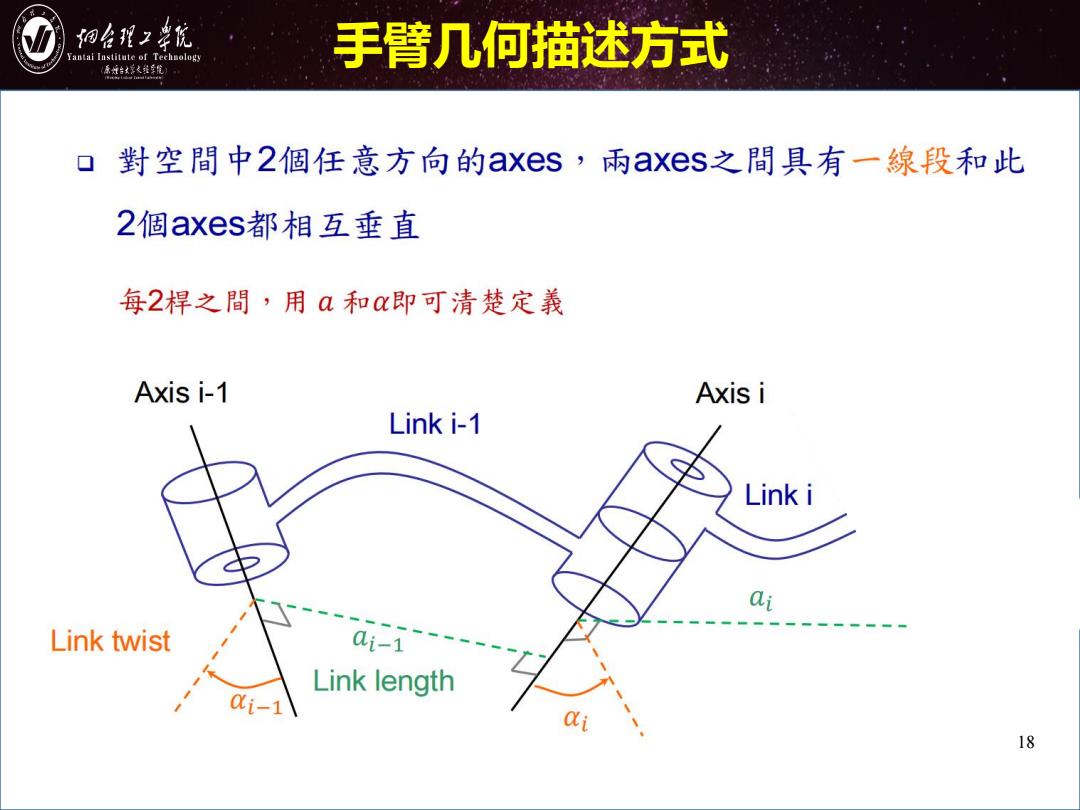
细台程2幸优 antai Institute of Technology 手臂几何描述方式 原城台好火维年航 口對空間中2個任意方向的axes,雨axes之間具有一線段和此 2個axes都相互垂直 每2桿之間,用a和c即可清楚定義 Axis i-1 Axis i Link i-1 Link i ai Link twist ai-1 Link length 0i-1 ai 18
18 手臂几何描述方式
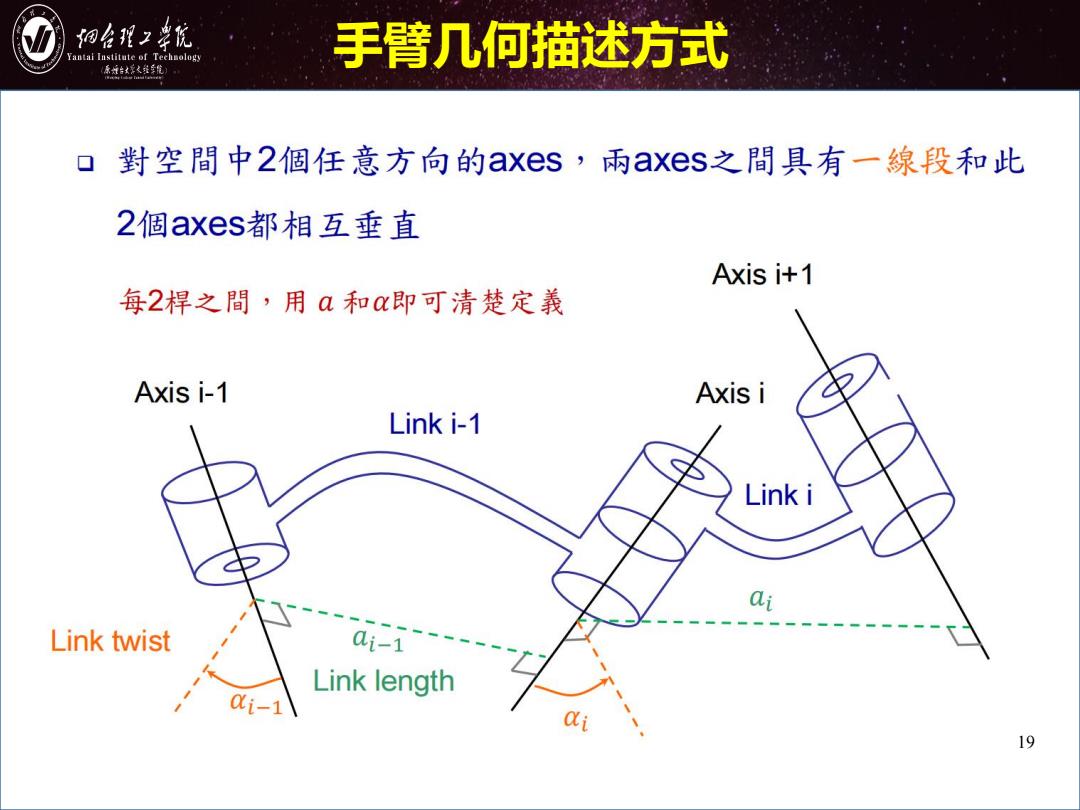
细台程2幸优 antai Institute of Technology 手臂几何描述方式 原城台好火维年航 口對空間中2個任意方向的axes,雨axes之間具有一線段和此 2個axes都相互垂直 Axis i+1 每2桿之間,用a和c即可清楚定義 Axis i-1 Axis i Link i-1 Link i ai Link twist ai-1 Link length 0i-1 ai 19
19 手臂几何描述方式
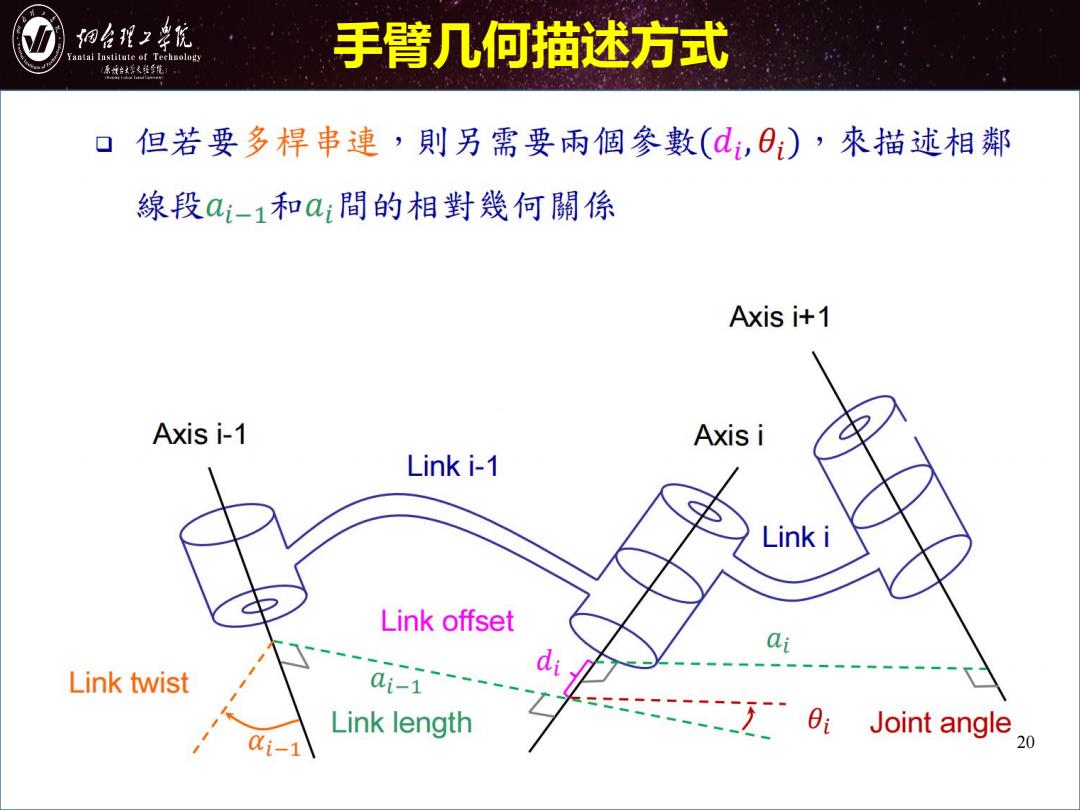
细台程2幸优 antai Institute of Technology 手臂几何描述方式 原城台好火维年院 ▣但若要多桿串連’則另需要雨個參數(di,O)’來描述相鄰 線段ai-1和ai間的相對幾何關係 Axis i+1 Axis i-1 Axis i Link i-1 Link i Link offset ai Link twist 0i-1-- Link length Joint angle 0Ci-1
20 手臂几何描述方式
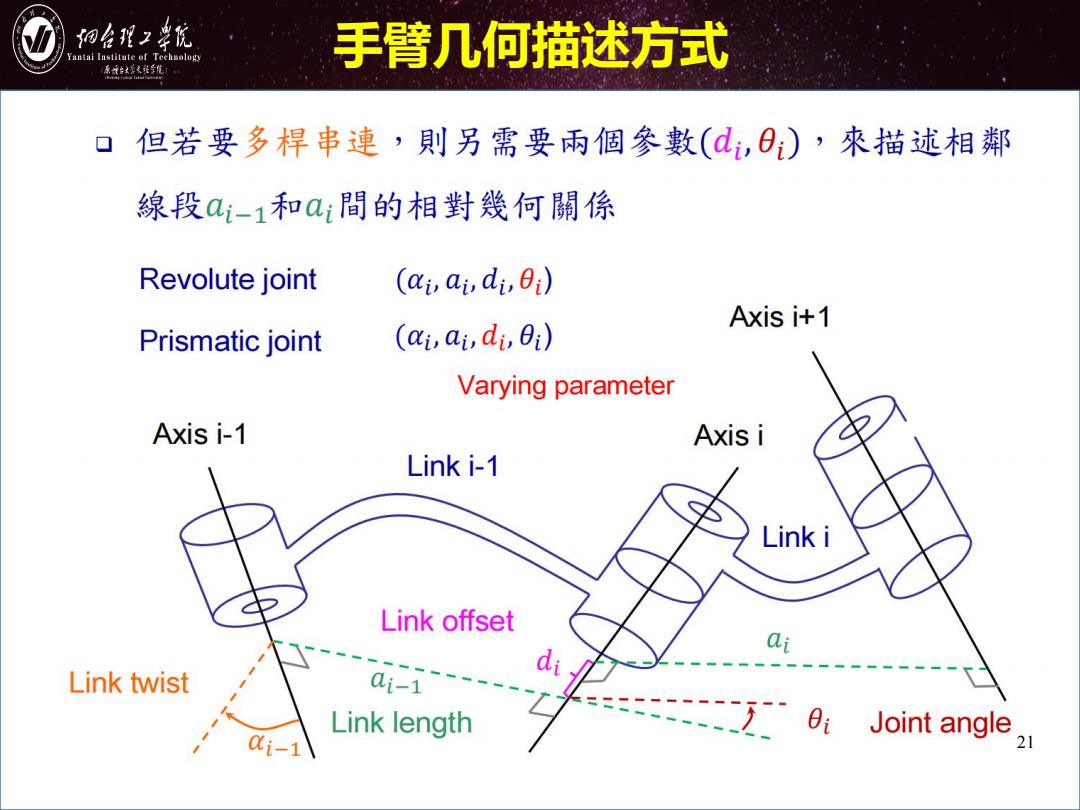
细台程2幸优 antai Institute of Technology 手臂几何描述方式 原城台好火维年航 口但若要多桿串連’则另需要两個參數(di,0)’來描述相鄰 線段ai-1和a;間的相對幾何關係 Revolute joint (ai,ai,di,i) Axis i+1 Prismatic joint (ai,ai,di,0i) Varying parameter Axis i-1 Axis i Link i-1 Link i Link offset ai Link twist Qi-1 Link length Joint angle 0Ci-1
21 手臂几何描述方式