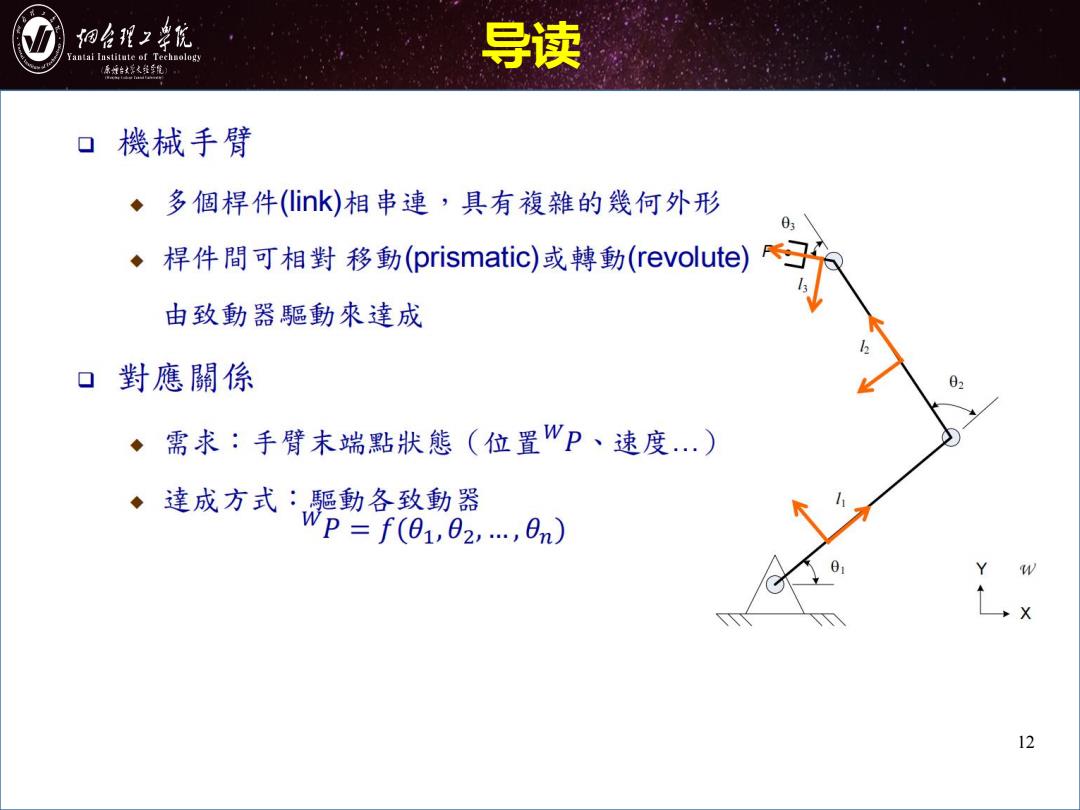
阳台程2幸优 antai Institute of Technology 导读 原城台好火维年院 口機械手臂 ·多個桿件(Iink)相串連,具有複雜的幾何外形 ◆·桿件間可相對移動(prismatic))或轉動(revolute) 由致動器驅動來達成 口對應關係 ◆需求:手臂末端點狀態(位置WP、速度.) ◆達成方式:驅動各致動器 wp=f(01,02,…,0n) Y X 12
12 导读
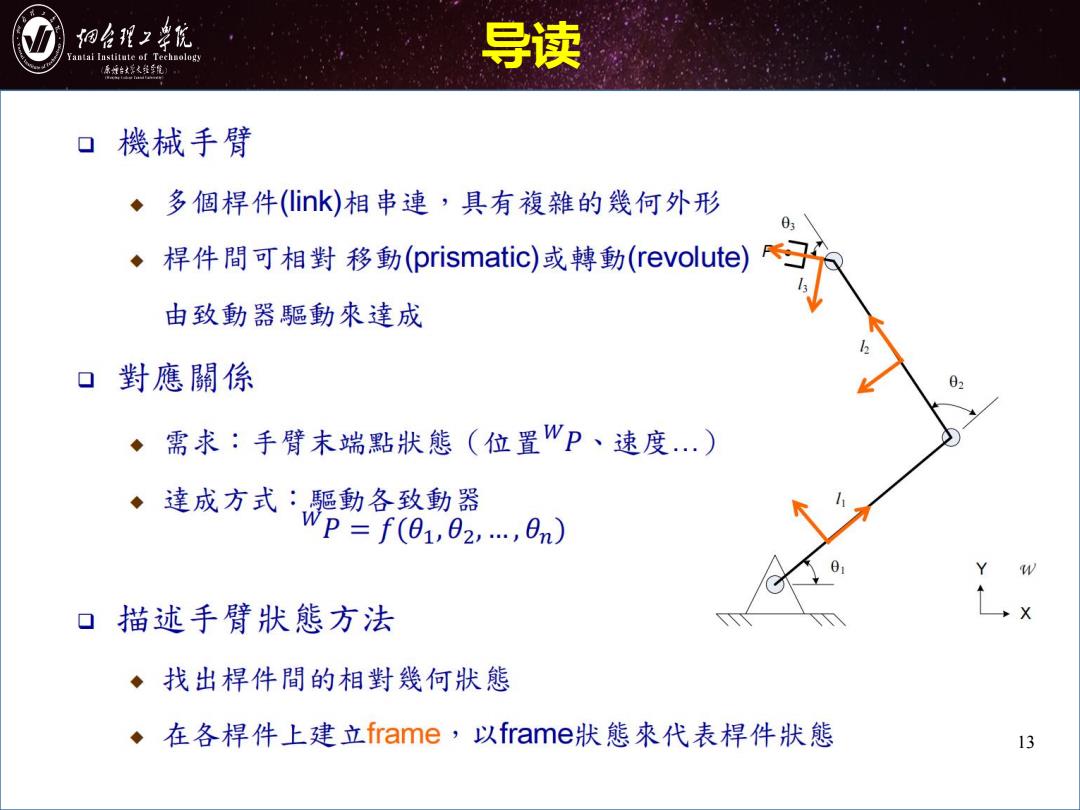
阳台程2幸优 antai Institute of Technology 导读 原城台好火维年馆 口機械手臂 ·多個桿件(ink)相串連,具有複雜的幾何外形 ◆桿件間可相對移動(prismatic)或轉動(revolute) 由致動器驅動來達成 口對應關係 ◆需求:手臂末端點狀態(位置WP、速度.) ◆達成方式:驅動各致動器 wp=f(01,02,…,0n) ▣描述手臂狀態方法 ◆找出桿件間的相對幾何狀態 ◆在各桿件上建立frame,以frame状態來代表桿件状態 13
13 导读
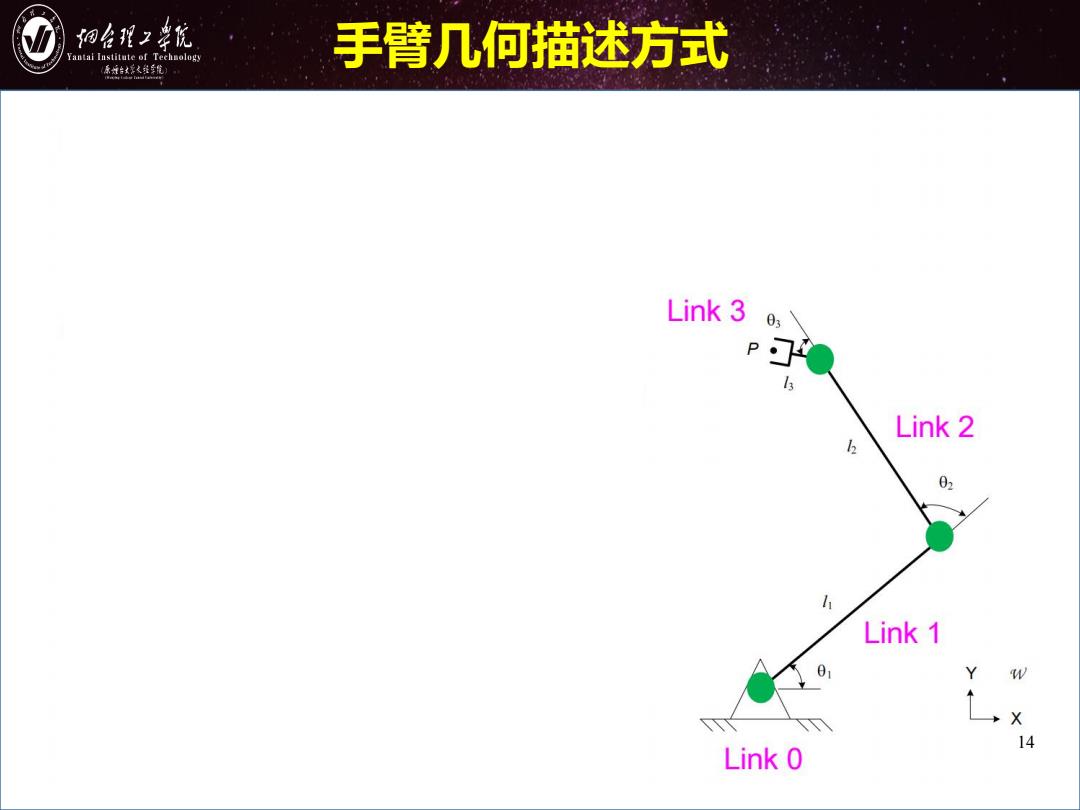
细台程2幸优 Yantai Institute of Technology 手臂几何描述方式 原城台好火维年院 Link 3 03 13 Link 2 12 02 Link 1 Y W 14 Link 0
14 手臂几何描述方式
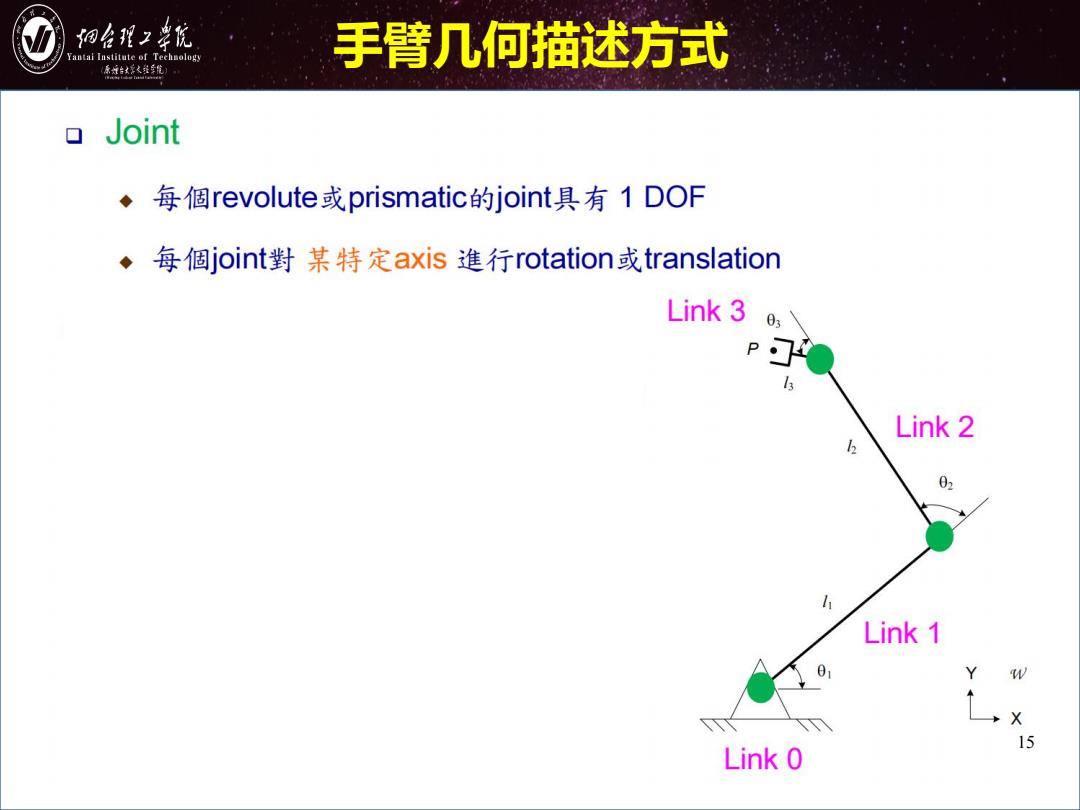
细台程2幸优 Yantai Institute of Technology 手臂几何描述方式 原城台好火维年院 a Joint ◆每個revolute或prismatic的joint.具有1DOF ◆每個joint:對某特定axis進行rotation或translation Link 3 Link 2 02 Link 1 Y W X 15 Link 0
15 手臂几何描述方式
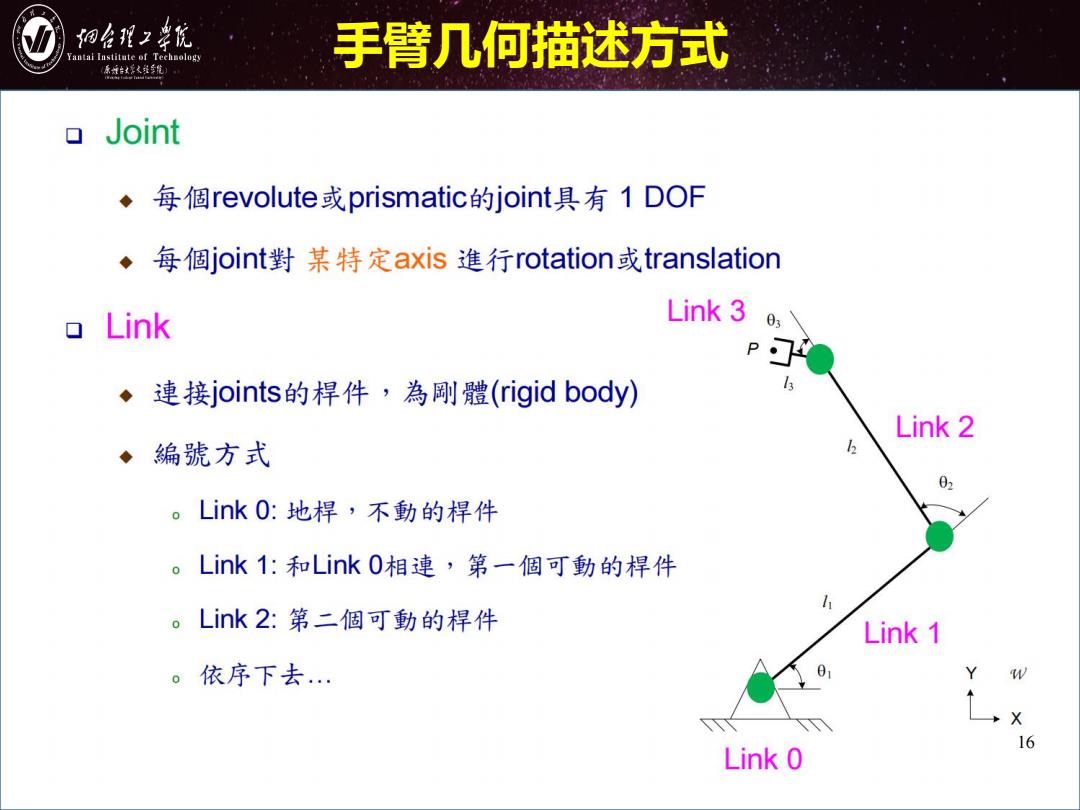
阳台现2华航 Yantai Institute of Technology 手臂几何描述方式 原城台好父维年院 a Joint ◆每個revolute或prismatic的joint.具有1DOF ◆每個joint對某特定axis進行rotation或translation a Link Link 3 ◆連接joints的桿件,為剛體(rigid body) Link 2 编號方式 0 。Link0:地桿,不動的桿件 。Link1:和Link0相連,第一個可動的桿件 。 Link2:第二個可動的桿件 Link 1 。依序下去… Y W 16 Link 0
16 手臂几何描述方式