阳台现2华航 antai Institute of Technology 导读 原城台好火维年馆 ▣運動學(Kinematics):討論運動狀態本身,未連結到產生運 動的「力」 ·位置(x)、速度()加速度(@)、和時間(t)之間的關係 ·移動/轉動 d d X a= dt 。位置/姿態 d2 a= dtzx vdv ads 。速度角速度 。加速度/角加速度 口動力學(Dynamics):討論力/力矩如何產生運動 7
7 导读
阳台现2华航 antai Institute of Technology 导读 原城台家之维能 口運動學(Kinematics):討論運動狀態本身,未連結到產生運 動的「力」 ·位置(x)、速度()加速度(@)、和時間(t)之間的關係 ·移動/轉動 d d X a= dt 。位置/姿態 d2 a三 atzr vdv ads 。速度角速度 。加速度/角加速度 口動力學(Dynamics):討論力/力矩如何產生運動 ◆Newton's2 nd Law ∑F=ma 8
8 导读
阳台现2华航 antai Institute of Technology 导读 原城台文家之维年榄 口運動學(Kinematics):討論運動狀態本身,未連結到產生運 動的「力」 ·位置(x)、速度()加速度(@)、和時間(t)之間的關係 ·移動/轉動 d X a= dt 。位置/姿態 d2 a三 dtzr vdv ads 。速度角速度 。加速度/角加速度 口動力學(Dynamics):討論力/力矩如何產生運動 ◆Newton's2 nd Law ∑F=ma ◆Work&energy T1+V+U1-2'=T2+V2 9
9 导读
阳台现2华航 antai Institute of Technology 导读 原城台文家之维年榄 ▣運動學(Kinematics):討論運動狀態本身,未連結到產生運 動的「力」 ·位置(x)、速度()、加速度(a)、和時間(t)之間的關係 ·移動/轉動 d 0= X a= dt 。位置/姿態 d2 dtzr vdv ads 。速度角速度 。加速度/角加速度 口動力學(Dynamics):討論力/力矩如何產生運動 ◆Newton's2 nd Law ∑F=ma ◆Work&energy T1+V1+U1-2'=T2+V2 ◆Impulse&momentum ∫∑rdt=c2-Gi 10
10 导读
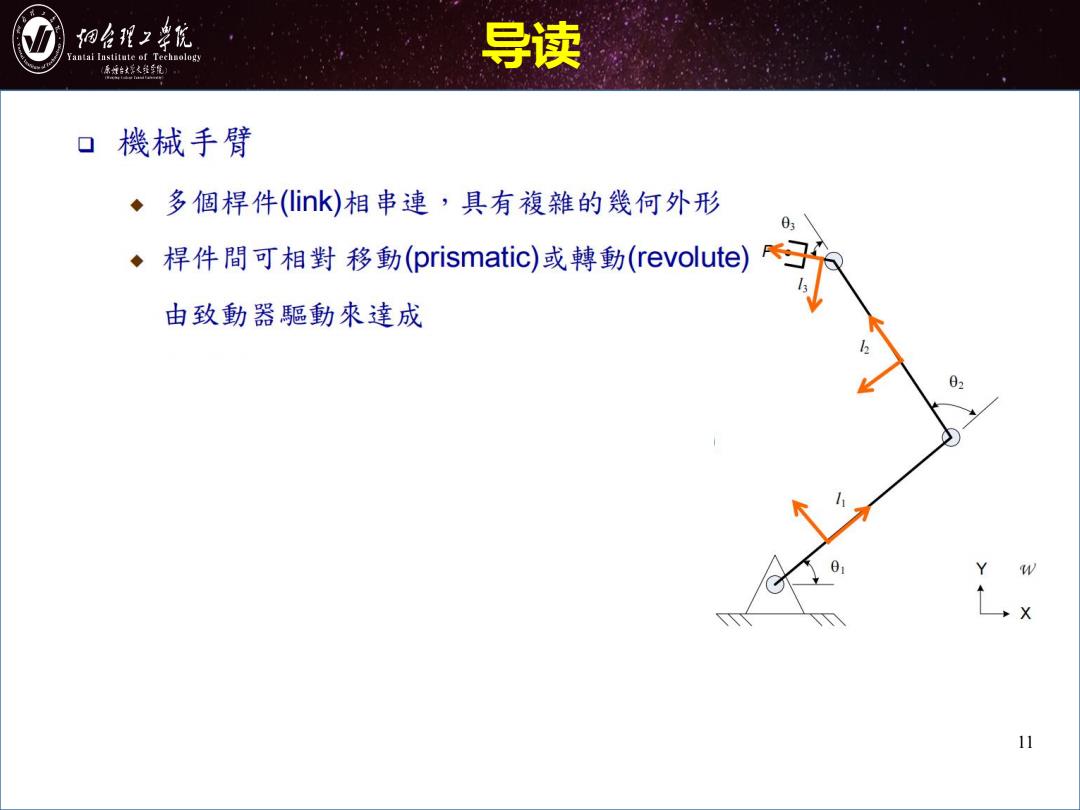
细台形z幸院 antai Institute of Technology 导读 原城台好火维年院 口機械手臂 ·多個桿件(ink)相串連,具有複雜的幾何外形 ◆桿件間可相對移動(prismatic)或轉動(revolute) 由致動器驅動來達成 Y X 11
11 导读