2.1控制系统的运功方程 两类非线性系统 ①具有连续变化的非线性条统 >动态:ym=f(tyy,yn-,x,x1,,xm) >静态:y=f(x) ② 本质非线性系统 动态:四=J,,) 条件1 f(t,少,,ym-,七,,x)…条件2 态:y (化,x)…条件1 f,(t,x)… 条件2 2023/724 北京料技大学自功化学院控制系 11
2023/7/24 北京科技大学自动化学院控制系 11 2.1 控制系统的运动方程 两类非线性系统 ① 具有连续变化的非线性系统 ➢ 动态:y (n)=f(t;y,y(1),…,y(n-1),x,x(1),…,x(m)) ➢ 静态:y=f(x) ② 本质非线性系统 = = − − ( , ) 2 ( , ) 1 ( ; , , , , , , ) 2 ( ; , , , , , , ) 1 2 1 ( 1) ( ) 2 ( 1) ( ) ( ) 1 条 件 条 件 静态: 条 件 条 件 动态: f t x f t x y f t y y y x x f t y y y x x y n n n n n
2.1控制系统的运功方程 非线性微分方程的求解很困难。在一定条件下,近 似地转化为线性微分方程,可以使象统的动态特 性的分析大为简化。实践证明,这样做能够圆满 地解决许多工程问题,有很大的实际意义。 线性化的方法 忽略弱非线性环节:如果元件的非线性因素较弱或者不 在条统线性工作范围以内,则它们对条统的影响很小, 就可以忽略。 ② 台劳级数展开法(小偏差法,切线法,增量线性化法): 适用前提一假设在控制系统的整个调节过程中,各个元 件的输入和输出量只是在平衡点附近作微小变化。 2023/724 北京料技大学自功化学院控制系 12
2023/7/24 北京科技大学自动化学院控制系 12 2.1 控制系统的运动方程 非线性微分方程的求解很困难。在一定条件下,近 似地转化为线性微分方程,可以使系统的动态特 性的分析大为简化。实践证明,这样做能够圆满 地解决许多工程问题,有很大的实际意义。 线性化的方法 ① 忽略弱非线性环节:如果元件的非线性因素较弱或者不 在系统线性工作范围以内,则它们对系统的影响很小, 就可以忽略。 ② 台劳级数展开法(小偏差法,切线法,增量线性化法): 适用前提—假设在控制系统的整个调节过程中,各个元 件的输入和输出量只是在平衡点附近作微小变化
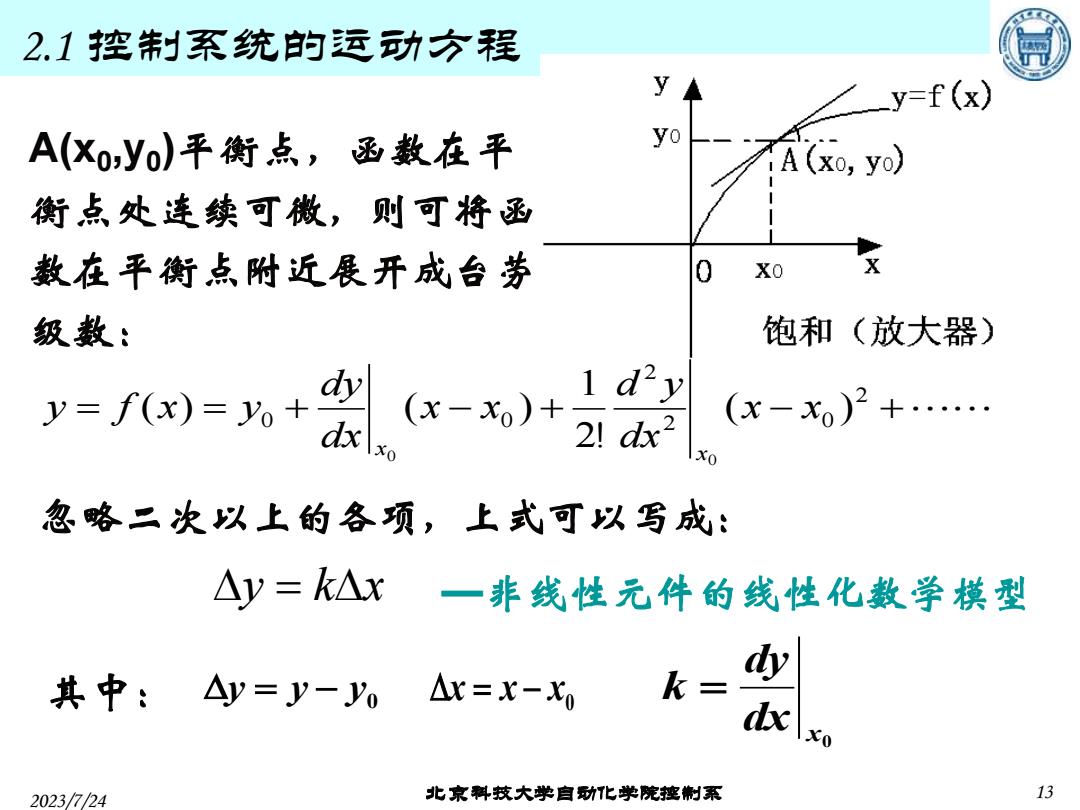
2.1控制系统的运功方程 y=f(x) A(Xoyo)平衡点,函数在平 yo A (xo,yo) 衡点处连续可微,则可将函 数在平衡点附近展开成台劳 XO X 级数: 饱和(放大器) y=f()=⅓+ dx (x-x)+ 1d'y 21dk2 (x-x0)2+. 忽略二次以上的各项,上式可以写成: △y=k△x一非线性元件的线性化数学模型 y 其中:△y=y-yo △x=X-Xo k= dx 2023/724 北京料技大学自功化学院控制系 13
2023/7/24 北京科技大学自动化学院控制系 13 2.1 控制系统的运动方程 = = + − + 2 − 0 2 + 2 0 0 ( ) 2! 1 ( ) ( ) 0 0 x x dx d y x x dx dy y f x y x x 0 y = y − y 0 x = x − x x0 dx dy k = 忽略二次以上的各项,上式可以写成: A(x0 ,y0 )平衡点,函数在平 衡点处连续可微,则可将函 数在平衡点附近展开成台劳 级数: y = kx 其中: —非线性元件的线性化数学模型

2.1控制系统的运功方程 平均斜率法:如果一非线性元件输入输出关条如下图 所示,此时不能台劳级数展开法,可用平均斜率法得 线性化方程为: y=kx 其中: k= yi -X1 X1 X X1 -y1 2023/724 北京料技大学自功化学院控制系 14
2023/7/24 北京科技大学自动化学院控制系 14 2.1 控制系统的运动方程 ③ 平均斜率法:如果一非线性元件输入输出关系如下图 所示,此时不能台劳级数展开法,可用平均斜率法得 线性化方程为: y = kx 1 1 x y k = 0 x y x1 y1 -x1 -y1 其中:

2.1控制系统的运功方程 注意:这几种方法只适用于一些非线性程度较低 的系统,对于某些严重的非线性(本质非线性) 不能作线性化处理,一般用相平面法及描述函 数法进行分析。 继电'特性 饱和特性 2023/724 北京料技大学自功化学院控制系 15
2023/7/24 北京科技大学自动化学院控制系 15 2.1 控制系统的运动方程 注意:这几种方法只适用于一些非线性程度较低 的系统,对于某些严重的非线性(本质非线性) 不能作线性化处理,一般用相平面法及描述函 数法进行分析