《自动控制原理》 实验指导书 壮袁科发大紧 ,1Q UNIVERSITY OE 腐霖 北京科技大学自动化学院控制科学与工程系 2013年4月
《自动控制原理》 实验指导书 实验指导书 北京科技大学自动化学院控制科学与工程系 2013 年 4 月
自动控制原理实验指导书 目 录 实验一典型系统的时域响应和稳定性分析」 2 实验二用MATLAB建立传递函数模型 6 实验三利用MATLAB进行时域分析 14 实验四线性定常控制系统的稳定分析 26 实验五利用MATLAB绘制系统根轨迹 30 实验六线性系统的频域分析 38 实验七基于MATLAB控制系统频域法串联校正设计52 附录1 MATLAB简介 59 附录2 SIMULINK简介 68
自动控制原理实验指导书 I 目 录 实验一 典型系统的时域响应和稳定性分析.................................................... 2 实验二 用MATLAB建立传递函数模型........................................................... 6 实验三 利用MATLAB进行时域分析............................................................. 14 实验四 线性定常控制系统的稳定分析.......................................................... 26 实验五 利用MATLAB绘制系统根轨迹......................................................... 30 实验六 线性系统的频域分析.......................................................................... 38 实验七 基于MATLAB控制系统频域法串联校正设计................................. 52 附录1 MATLAB简介........................................................................................ 59 附录2 SIMULINK简介..................................................................................... 68
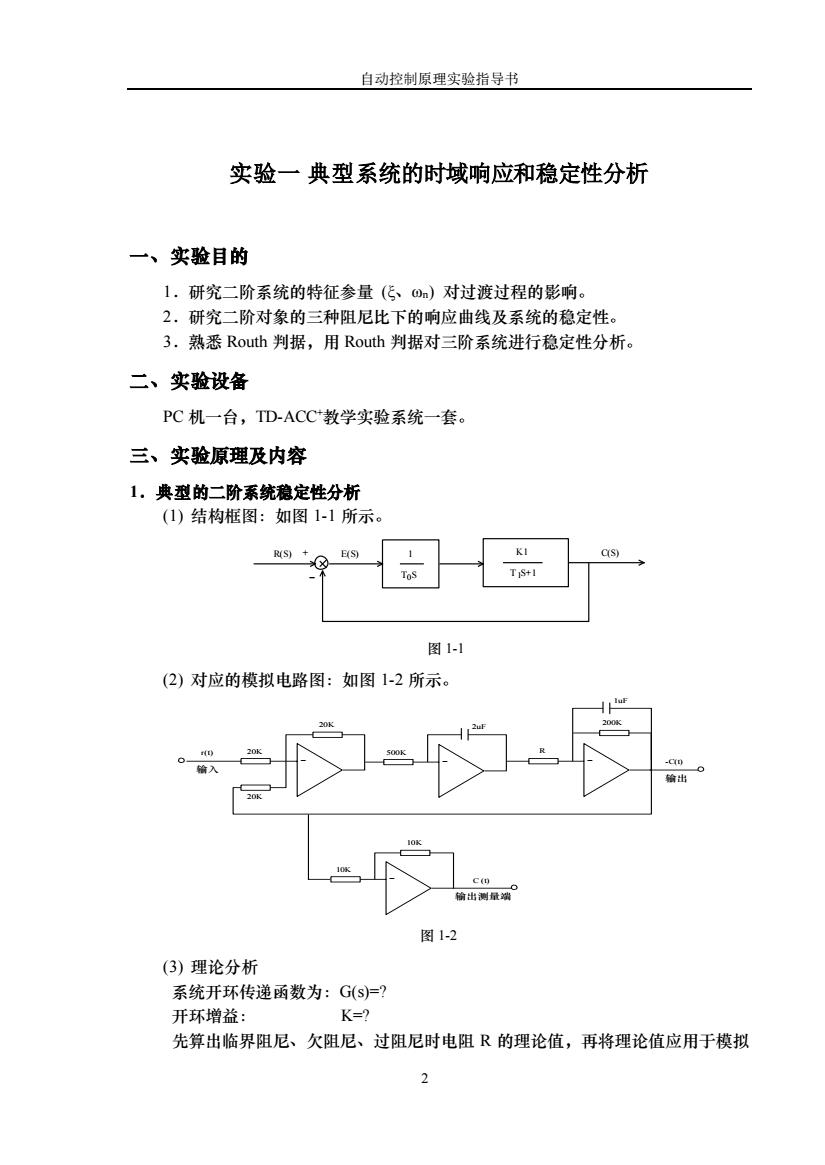
自动控制原理实验指导书 实验一典型系统的时域响应和稳定性分析 一、实验目的 1.研究二阶系统的特征参量(5、o)对过渡过程的影响。 2.研究二阶对象的三种阻尼比下的响应曲线及系统的稳定性。 3.熟悉Routh判据,用Routh判据对三阶系统进行稳定性分析。 二、实验设备 PC机一台,TD-ACC教学实验系统一套。 三、实验原理及内容 1.典型的二阶系统稳定性分析 (1)结构框图:如图1-1所示。 R(S)+ E(S) KI as) ToS TS+1 图1-1 (2)对应的模拟电路图:如图1-2所示。 人 0 2D0 g -0 输入 输出 20W 0 偷出测量端。 图1-2 (3)理论分析 系统开环传递函数为:G(S)=? 开环增益: K=? 先算出临界阻尼、欠阻尼、过阻尼时电阻R的理论值,再将理论值应用于模拟
自动控制原理实验指导书 2 实验一 典型系统的时域响应和稳定性分析 一、实验目的 1.研究二阶系统的特征参量 (ξ、ωn) 对过渡过程的影响。 2.研究二阶对象的三种阻尼比下的响应曲线及系统的稳定性。 3.熟悉 Routh 判据,用 Routh 判据对三阶系统进行稳定性分析。 二、实验设备 PC 机一台,TD-ACC+教学实验系统一套。 三、实验原理及内容 1.典型的二阶系统稳定性分析 (1) 结构框图:如图 1-1 所示。 T S+1 R(S) + K1 C(S) _ T S 1 1 0 E(S) 图 1-1 (2) 对应的模拟电路图:如图 1-2 所示。 r(t) _ 20K 20K _ R 200K -C(t) _ 500K 2uF 1uF 20K _ 10K 10K C (t) 输出测量端 输出 输入 图 1-2 (3) 理论分析 系统开环传递函数为:G(s)=? 开环增益: K=? 先算出临界阻尼、欠阻尼、过阻尼时电阻 R 的理论值,再将理论值应用于模拟
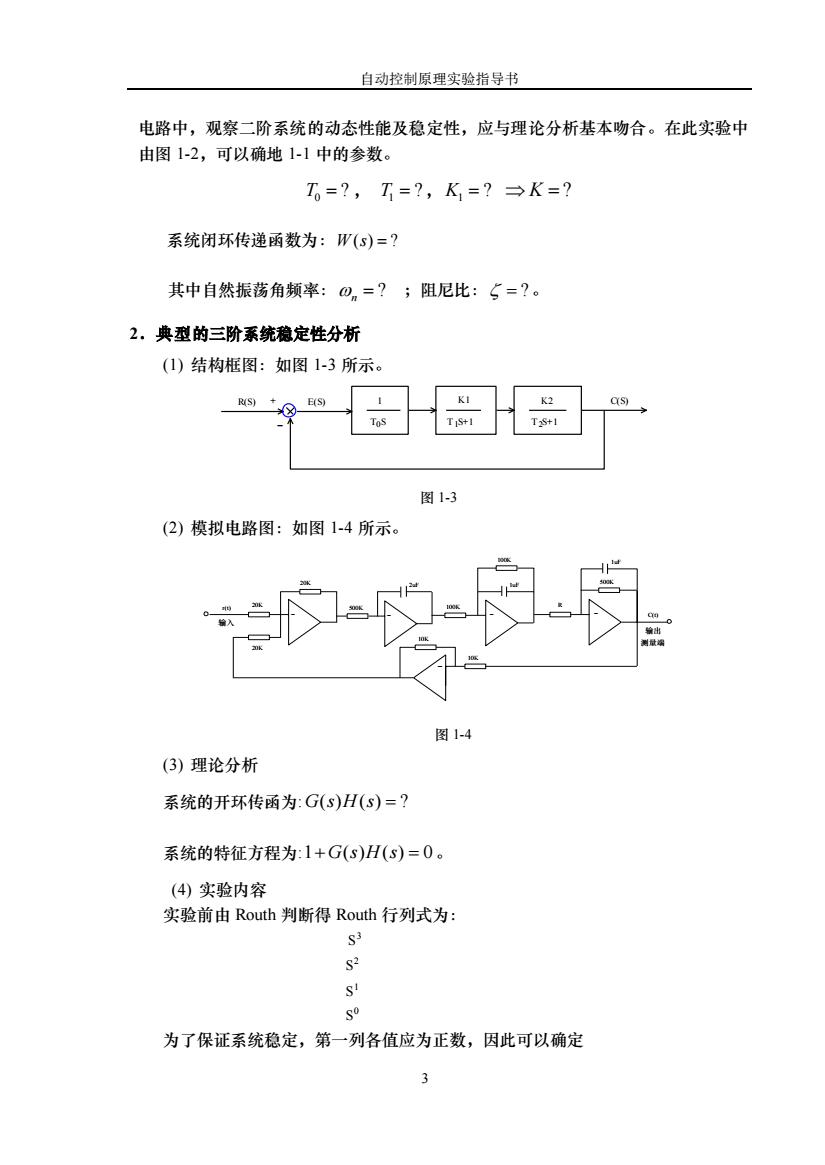
自动控制原理实验指导书 电路中,观察二阶系统的动态性能及稳定性,应与理论分析基本吻合。在此实验中 由图1-2,可以确地1-1中的参数。 T=?,I=?,K=?→K=? 系统闭环传递函数为:W(s)=? 其中自然振荡角频率:⊙n=?;阻尼比:5-?。 2.典型的三阶系统稳定性分析 (1)结构框图:如图1-3所示。 R(S) E(S周 Kt K2 CS) ToS T1S+1 TS+1 图1-3 (2)模拟电路图:如图1-4所示。 输出 测量端 图1-4 (3)理论分析 系统的开环传函为:G(s)H(s)=? 系统的特征方程为:1+G(s)H(s)=0。 (4)实验内容 实验前由Routh判断得Routh行列式为: S3 s s So 为了保证系统稳定,第一列各值应为正数,因此可以确定 3
自动控制原理实验指导书 3 电路中,观察二阶系统的动态性能及稳定性,应与理论分析基本吻合。在此实验中 由图 1-2,可以确地 1-1 中的参数。 0 T = ? , 1 T = ?, 1 K = ? = K ? 系统闭环传递函数为: W s( ) ? = 其中自然振荡角频率: ? n = ;阻尼比: = ?。 2.典型的三阶系统稳定性分析 (1) 结构框图:如图 1-3 所示。 T S+1 R(S) + K2 _ T S 1 0 2 E(S) T S+1 K1 C(S) 1 图 1-3 (2) 模拟电路图:如图 1-4 所示。 r(t) _ 20K 20K _ R 100K C(t) _ 100K 1uF 1uF 20K _ 10K 10K 测量端 输入 _ 500K 2uF 输出 500K 图 1-4 (3) 理论分析 系统的开环传函为: G s H s ( ) ( ) ? = 系统的特征方程为: 1 ( ) ( ) 0 + = G s H s 。 (4) 实验内容 实验前由 Routh 判断得 Routh 行列式为: S 3 S 2 S 1 S 0 为了保证系统稳定,第一列各值应为正数,因此可以确定
自动控制原理实验指导书 系统稳定K值的范围 系统临界稳定K 系统不稳定K值的范围 四、实验步骤 1)将信号源单元的“ST”端插针与“S”端插针用“短路块”短接。由于每个运 放单元均设置了锁零场效应管,所以运放具有锁零功能。将开关分别设在“方波”档 和“500ms~12s”档,调节调幅和调频电位器,使得“OUT”端输出的方波幅值为 1V,周期为10s左右。 2)典型二阶系统瞬态性能指标的测试 (1)按模拟电路图1-2接线,将1中的方波信号接至输入端,取R=10KΩ。 (2)用示波器观察系统响应曲线C(),测量并记录超调M、峰值时间t,和调节时 间ts。 (3)分别按R=20K2;40KQ;100K2;改变系统开环增益,观察响应曲线C(0, 测量并记录性能指标M、p和s,及系统的稳定性。并将测量值和计算值进行比较(实 验前必须按公式计算出)。将实验结果填入表1-1中。 3)典型三阶系统的性能 (1)按图1-4接线,将1中的方波信号接至输入端,取R=30KQ。 (2)观察系统的响应曲线,并记录波形。 (3)减小开环增益(R=41.7K2;100K2),观察响应曲线,并将实验结果填入表 1-3中。表1-3中已填入了一组参考测量值,供参照。 五、实验现象分析 1)典型二阶系统瞬态性能指标实验测试值 表1-1 Mr(%) tp(s) ts(s) 响 参数 K On () (c∞) 理 测 理 理 测 项 K2) 论 论 量 应情 值 值 值 值 值 值 况 0<5<1 10 欠阻尼 50 =1 临界 160 阻尼 I 过阻尼 200 4
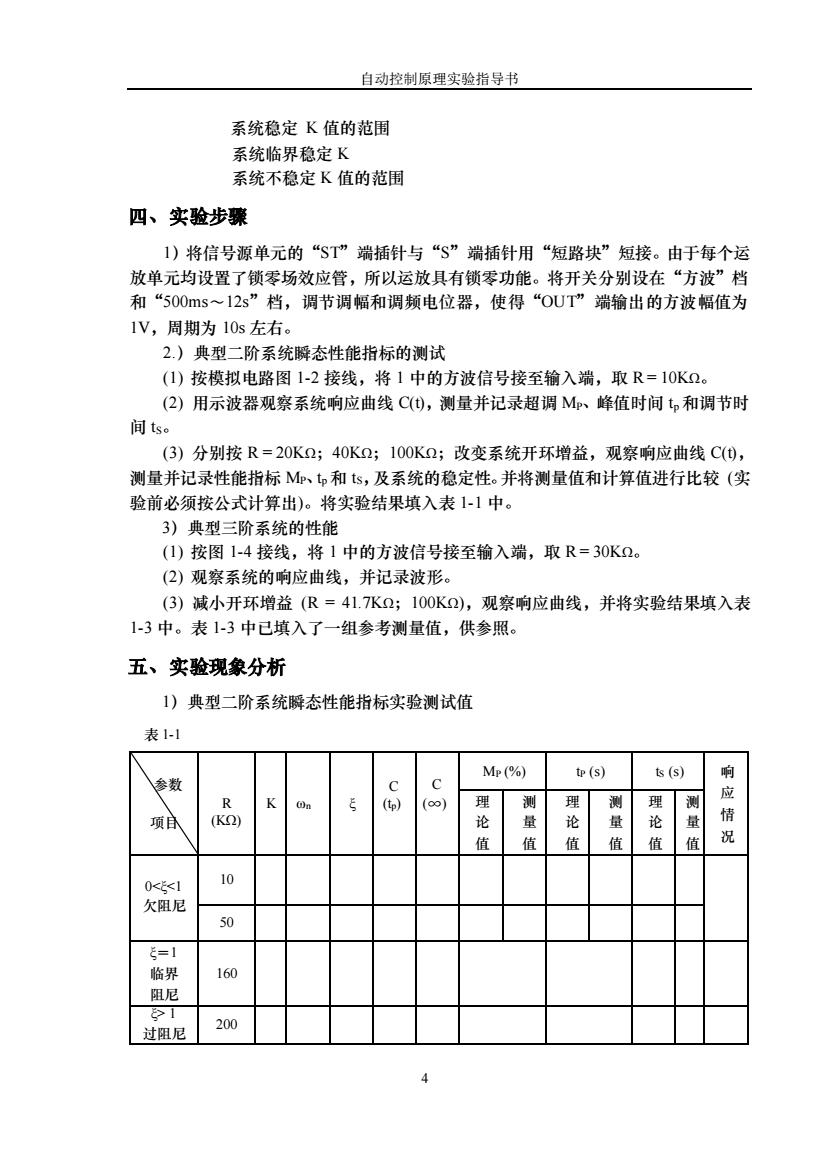
自动控制原理实验指导书 4 系统稳定 K 值的范围 系统临界稳定 K 系统不稳定 K 值的范围 四、实验步骤 1)将信号源单元的“ST”端插针与“S”端插针用“短路块”短接。由于每个运 放单元均设置了锁零场效应管,所以运放具有锁零功能。将开关分别设在“方波”档 和“500ms~12s”档,调节调幅和调频电位器,使得“OUT”端输出的方波幅值为 1V,周期为 10s 左右。 2.)典型二阶系统瞬态性能指标的测试 (1) 按模拟电路图 1-2 接线,将 1 中的方波信号接至输入端,取 R = 10KΩ。 (2) 用示波器观察系统响应曲线 C(t),测量并记录超调 MP、峰值时间 tp 和调节时 间 tS。 (3) 分别按 R = 20KΩ;40KΩ;100KΩ;改变系统开环增益,观察响应曲线 C(t), 测量并记录性能指标 MP、tp 和 tS,及系统的稳定性。并将测量值和计算值进行比较 (实 验前必须按公式计算出)。将实验结果填入表 1-1 中。 3)典型三阶系统的性能 (1) 按图 1-4 接线,将 1 中的方波信号接至输入端,取 R = 30KΩ。 (2) 观察系统的响应曲线,并记录波形。 (3) 减小开环增益 (R = 41.7KΩ;100KΩ),观察响应曲线,并将实验结果填入表 1-3 中。表 1-3 中已填入了一组参考测量值,供参照。 五、实验现象分析 1)典型二阶系统瞬态性能指标实验测试值 表 1-1 参数 项目 R (KΩ) K ωn ξ C (tp) C (∞) MP (%) tP (s) tS (s) 响 应 情 况 理 论 值 测 量 值 理 论 值 测 量 值 理 论 值 测 量 值 0<ξ<1 欠阻尼 10 50 ξ=1 临界 阻尼 160 ξ> 1 过阻尼 200