
憊 第七章控制条统的综合校正 7.1问题的提出 7.2系统校正的几种常见古典方法 7.3系统校正的概念 7-4超前校正及其参数的确定 7-5滞后校正及其参数的确定 7-6校正方法小结 7.7PID模型及其控制规律分析 7.8几种改良的PID控制器 2005-11-23 1
2005-11-23 1 第七章 控制系统的综合校正 7.1 问题的提出 7.2 系统校正的几种常见古典方法 7.3 系统校正的概念 7-4 超前校正及其参数的确定 7-5 滞后校正及其参数的确定 7-6 校正方法小结 7.7 PID模型及其控制规律分析 7.8几种改良的PID控制器
本章要点 >系统按正的几种常见古典方法 >超前校正 >滞后校正 >PID模型形式 >PID控制规律分析 >PID控制器参数的整定方法 2023/724 北京科技大学自功化学院自功化系 2
2023/7/24 北京科技大学自动化学院自动化系 2 ➢ 系统校正的几种常见古典方法 ➢ 超前校正 ➢ 滞后校正 ➢ PID模型形式 ➢ PID控制规律分析 ➢ PID控制器参数的整定方法 本章要点
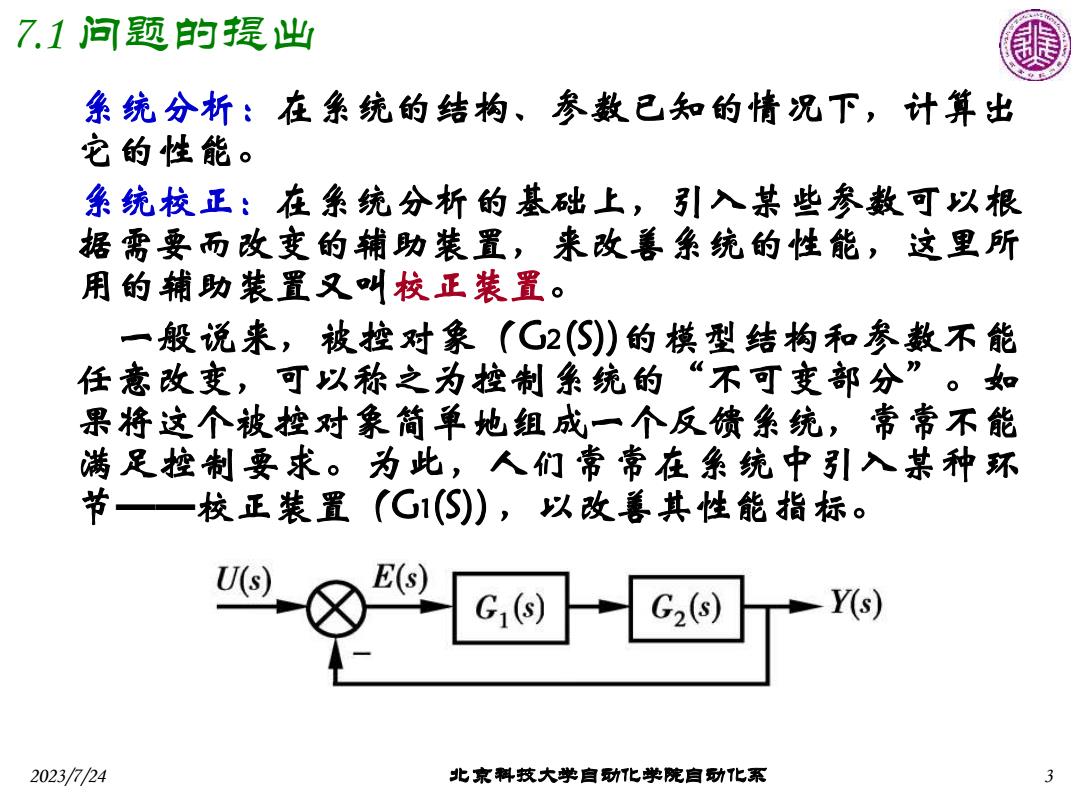
7.1问题的提出 系统分析:在系统的结构、参数已知的情况下,计算出 它的性能。 象统校正:在象统分析的基础上,引入某些参数可以根 据需要而改变的辅助装置,来改善系统的性能,这里所 用的辅助装置又叫校正装置。 一般说来,被控对象(G2(S)的模型结构和参数不能 任意改变,可以称之为控制条统的“不可变部分”。如 果将这个被控对象简单地组成一个反馈条统,常常不能 满足控制要求。为此,人们常常在条统中引入某种环 节一校正装置(G1(S),以改善其性能指标。 U(s) E(s) Gi(s) G2) -Y(s) 2023/724 北京料技大学自动化学院自功化系 3
2023/7/24 北京科技大学自动化学院自动化系 3 系统分析:在系统的结构、参数已知的情况下,计算出 它的性能。 系统校正:在系统分析的基础上,引入某些参数可以根 据需要而改变的辅助装置,来改善系统的性能,这里所 用的辅助装置又叫校正装置。 一般说来,被控对象(G2(S))的模型结构和参数不能 任意改变,可以称之为控制系统的“不可变部分” 。如 果将这个被控对象简单地组成一个反馈系统,常常不能 满足控制要求。为此,人们常常在系统中引入某种环 节——校正装置(G1(S)),以改善其性能指标。 7.1 问题的提出

7.1问题的提出 我们已经初步学过的几种校正方法: (1)对千扰补偿的前馈补偿 N(s) Gn(s) 被控对象 E(s) U(s) C(s) G2) Y(s) 当G,(w)=- 时,可以求得当U(S)=0时, G,(s) 有Y(S)=0恒定成立。说明象统输出Y(S)不受干扰 N(5)的影响。 2023/724 北京料技大学自动化学院自功化系 4
2023/7/24 北京科技大学自动化学院自动化系 4 当 时,可以求得当 时, 有 恒定成立。说明系统输出Y(s)不受干扰 N(s)的影响。 (1)对干扰补偿的前馈补偿 1 1 ( ) ( ) G s n G s = − Y s( ) 0 U s( ) 0 = 被控对象 我们已经初步学过的几种校正方法: 7.1 问题的提出
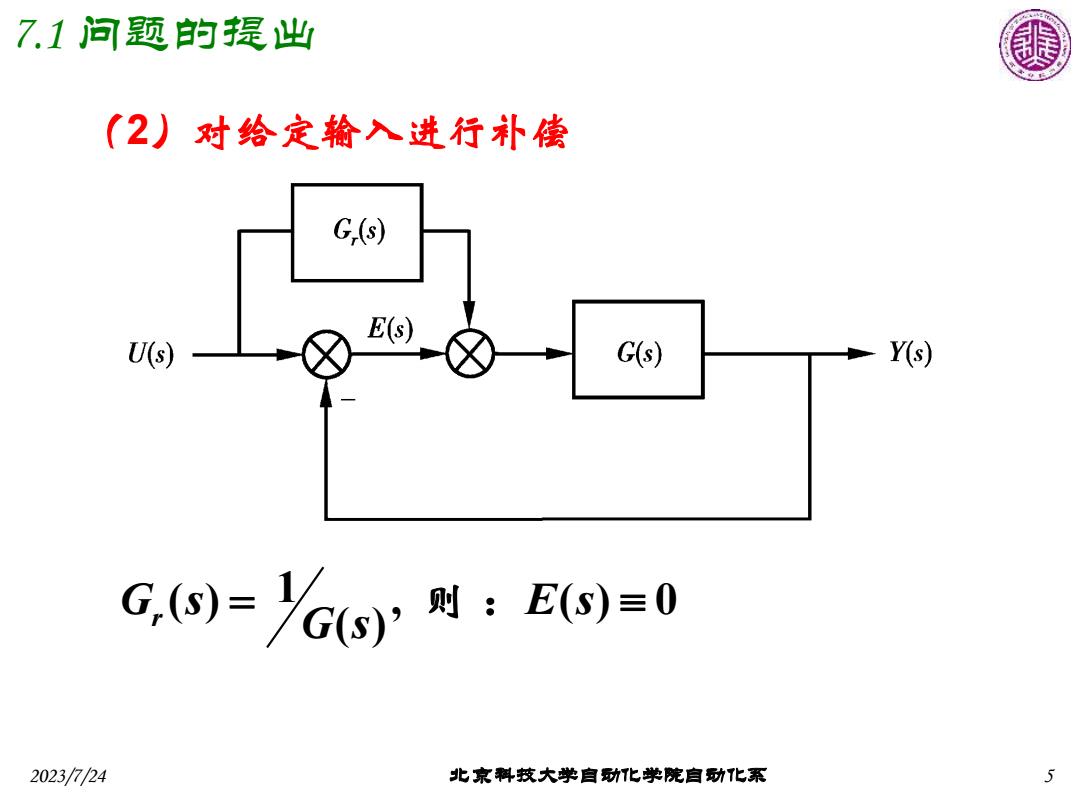
7.1问题的提出 (2)对给定输入进行补偿 G,6) E(s) U(s) C(s) Y(s) G,()=%sy则:E(w)=0 2023/7/24 北京料技大学自动化学院自功化系 5
2023/7/24 北京科技大学自动化学院自动化系 5 (2)对给定输入进行补偿 7.1 问题的提出 1 ( ) , ( ) 0 ( ) G s E s r G s = 则 :