第6章振动力学基础 §6.1简谐振动动力学 §6.2简谐振动运动学 §6.3微振动的简谐近似 §6.4平行简谐振动的合成振动频谱 §6.5垂直简谐振动的合成 §6.6阻尼振动 §6.7受迫振动共振
第 6 章 振动力学基础 §6.1 简谐振动动力学 §6.2 简谐振动运动学 §6.3 微振动的简谐近似 §6.5 垂直简谐振动的合成 §6.4 平行简谐振动的合成 振动频谱 §6.6 阻尼振动 §6.7 受迫振动 共振

§6.7受迫振动 共振 一、受迫振动 受迫振动:系统在周期性的外力持续作用下所 发生的振动。 策动力: 周期性的外力。 设: F=Fo cos@t
系统在周期性的外力持续作用下所 发生的振动。 受迫振动: 策动力: 周期性的外力。 设: = 0 cos ωtFF 一、受迫振动 §6.7 受迫振动 共振 Fr r xkf v v F −= o x x
d2x dx m =-kx-Y dt +Fcosωt 令: k 2 Y=26 m m d2x dx +2δ +00x=0 cos wt dt2 dt
tF t x kx t x m γ cosω d d d d 2 0 2 +−−= 令: δ γ ω 2 20 == mm k t m F x t x t x ωδ cosω d d 2 d d 2 0 2 0 2 =++
x=Ae 5 cos(-t+)+Acos(@t+p) 稳定振动状态: x=Acos(@t+o) A= F tan⑩= k 2 k 0n- om- 0 >结论:在稳定振动状态下,受迫振动的频率等于 策动力的频率
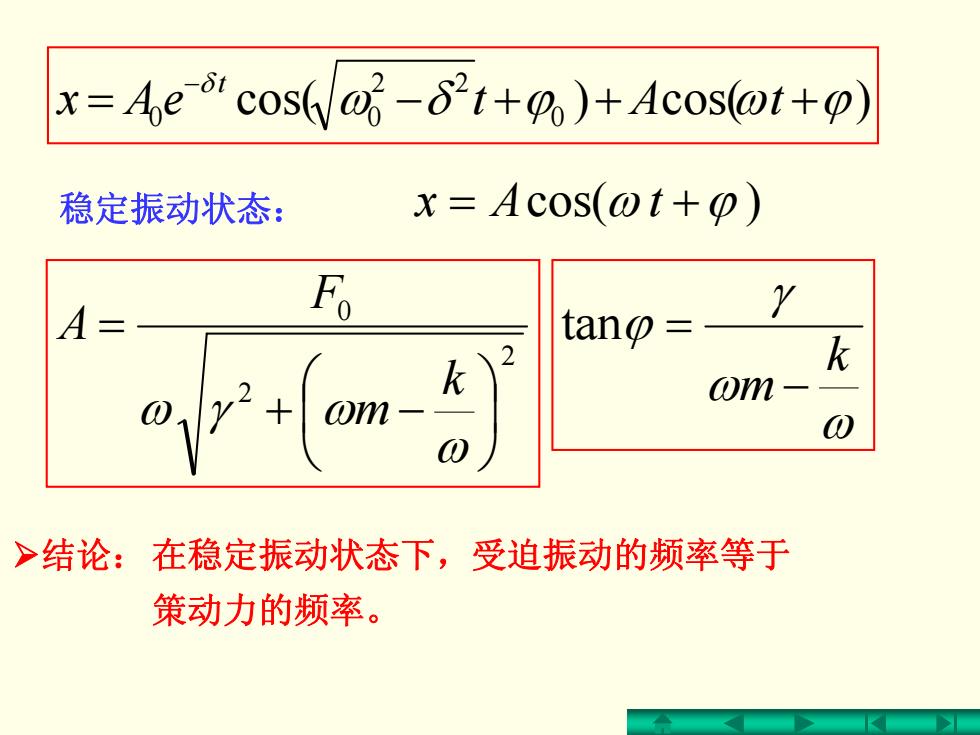
cos( )cos() 0 22 0 0 ϕωϕδω δ = +++− − eAx tAt t 稳定振动状态: = ω tAx +ϕ )cos( 2 2 0 ⎟⎠⎞ ⎜⎝⎛ −+ = ω ωγω k m F A ω ω γ ϕ k m − tan = 在稳定振动状态下,受迫振动的频率等于 策动力的频率。 ¾结论:
在稳态时,振动物体的速度 dx V= dt =mcosoM+g+3 其中: F max +(cm-k
在稳态时,振动物体的速度 ) 2 π cos( d d == max tv ϕω ++ t x v 其中: 2 2 0 max )( ω ωγ k m F v −+ =