(2)数学模型控制器 数学模型控制器在输出和输入的函数关系确定的情况下的 工作性能会很好。对于不确定的环境,数学模型控制器一般 采用概率分布来描述。存在以下问题: (1)不确定性一般很难用经典数据模型加以准确描述。 (2)很难将专家的知识加到系统中去,在这种系统中, 专家的知识一般只能用来估计初始状态和协方差条件
(2)数学模型控制器 数学模型控制器在输出和输入的函数关系确定的情况下的 工作性能会很好。对于不确定的环境,数学模型控制器一般 采用概率分布来描述。存在以下问题: (1)不确定性一般很难用经典数据模型加以准确描述。 (2)很难将专家的知识加到系统中去,在这种系统中, 专家的知识一般只能用来估计初始状态和协方差条件
2、目标实时跟踪系统 目标实时跟踪系统一般采用雷达或其它设备去探测目标与设备所 在平面的的高度和方位角。由两个马达控制设备的探测方向,通过连 续地调整两个马达的转速,保持对目标的连续跟踪。 对高度和方位角的控制可以采用相同的算法进行
2、目标实时跟踪系统 目标实时跟踪系统一般采用雷达或其它设备去探测目标与设备所 在平面的的高度和方位角。由两个马达控制设备的探测方向,通过连 续地调整两个马达的转速,保持对目标的连续跟踪。 对高度和方位角的控制可以采用相同的算法进行
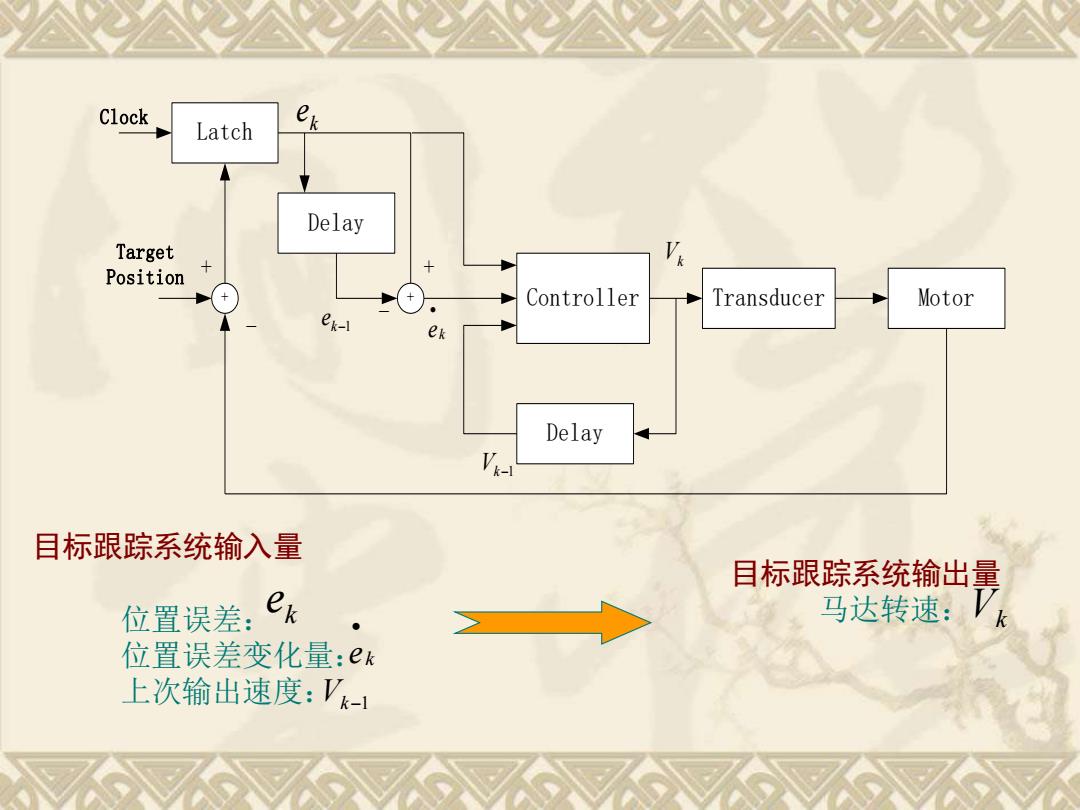
Clock Latch Delay Target Position Controller Transducer Motor ek Delay V 目标跟踪系统输入量 目标跟踪系统输出量 位置误差:ek 马达转速:V 位置误差变化量:ek 上次输出速度:Vk-1
目标跟踪系统输入量 位置误差: 位置误差变化量: 上次输出速度: 目标跟踪系统输出量 e k 马达转速: e k • Vk − 1 Vk Latch Delay Controller Delay + + Transducer Motor Clock Target Position + - k e ek • Vk−1 Vk k−1 e + -
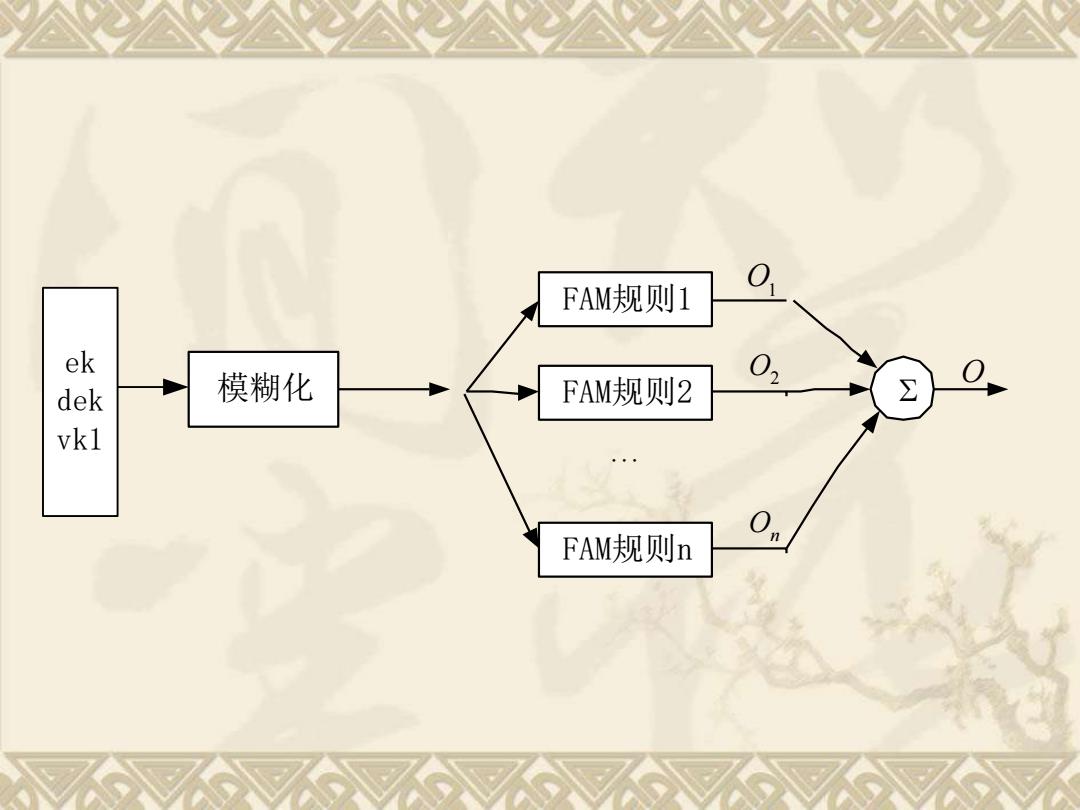
FAM规则1 ek dek 模糊化 FAM规则2 vkl FAM规则n
模糊化 FAM规则1 FAM规则2 FAM规则n ... O1 O2 On ek O dek vk1
我们限制模糊控制器的输出角速度y到区间[-6,6],同 样ekek、yk-也划分为7个等级: LN:大负 -6 MN: 中负 -4 SN: 负 -2 ZE: 零 0 SP:小正 2 MP: 中正 4 LP:大正 6 模糊论域采用梯形,重叠25%
我们限制模糊控制器的输出角速度 到区间[-6,6],同 样 、 、 也划分为7个等级: LN:大负 -6 MN:中负 -4 SN:小负 -2 ZE:零 0 SP:小正 2 MP:中正 4 LP:大正 6 模糊论域采用梯形,重叠25% k v k e k e • k 1 v −