所决定。各种摄像测量任务中,都是基于成像映射关系,确定各种几何与运动参 数。从几何角度来看,摄像成像过程是从三维空间向二维空间的映射,是从高维 空间向低维空间的投影。 1.3.1中心透视投影模型 中心透视投影又称为针孔模型是立体视觉系统中常用的一种理想的线性摄 像机模型,是对光学成像几何关系的简化。中心透视投影模型假设物体表面的反 射光或发射光都经过一个“针孔”点而投影在像平面上,这个针孔”点称为光心 也即投影中心或摄影中心。受光的直线传播条件约束,物点、光心和对应像点在 一条直线上。图1-4是中心透视投影模型成像,也就是针孔成像的原理示意图 针孔模型主要由光心、成像面和光轴组成。中心透视投影模型中光心到像面的像 距v称为焦距£,物距u等于光心到物体的距离。 图1-4中心透视投影模型成像几何模型 根据图1-4所示的中心透视投影的几何映射关系,物点P到光轴的距离D与 对应像点p到光轴的距离d之间满足式(1-2)。 D_d (1-2) 1.3.2透镜成像模型 图1-5透镜成像几何模型 根据几何光学的基本原理,理想的凸透镜成像光路如图1-5所示,其中物平 面到透镜中心的距离为物距飞,清晰成像的像平面到透镜中心的距离为像距飞 透镜焦距为R三者满足如式(1-3)所示的成像公式:
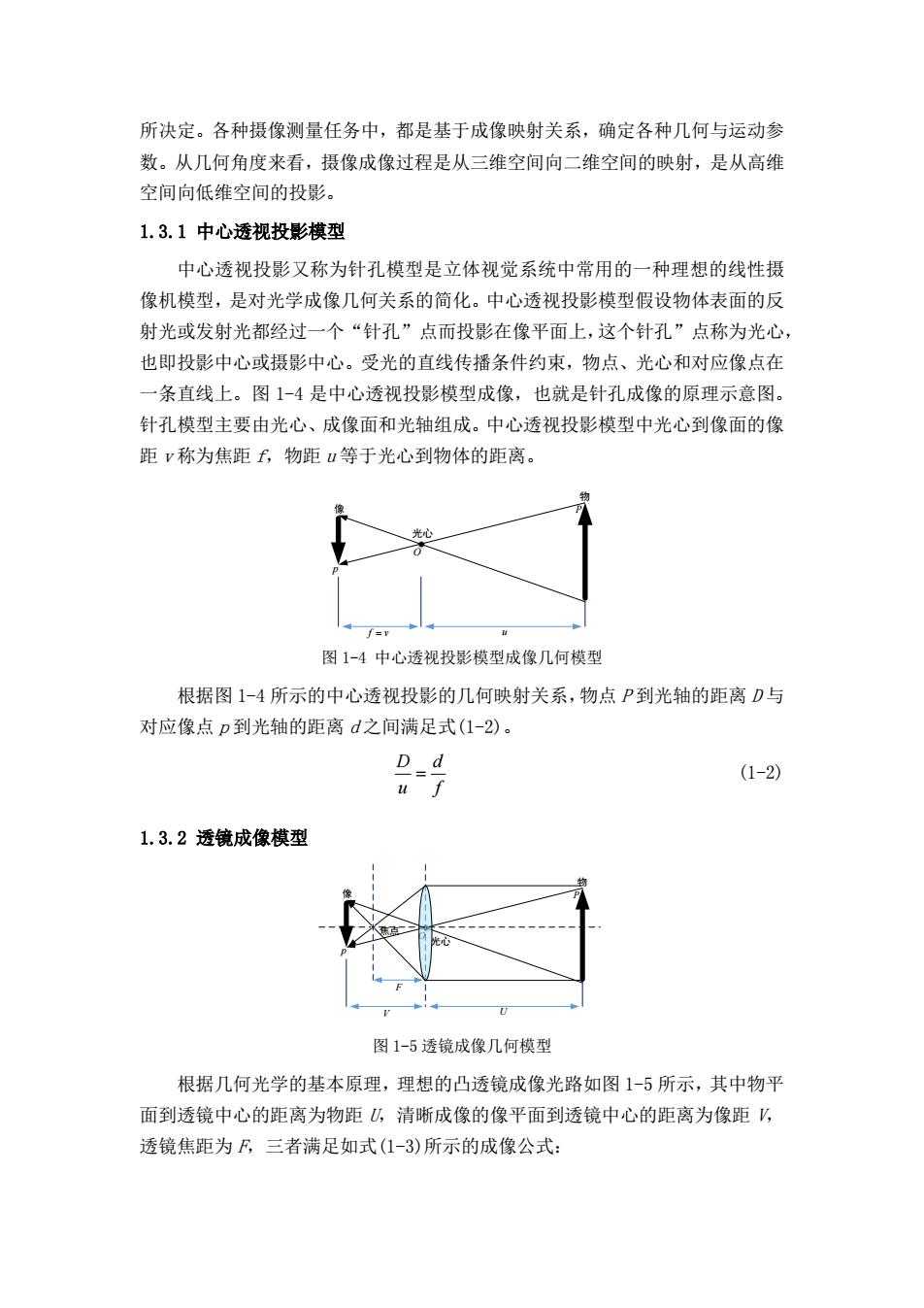
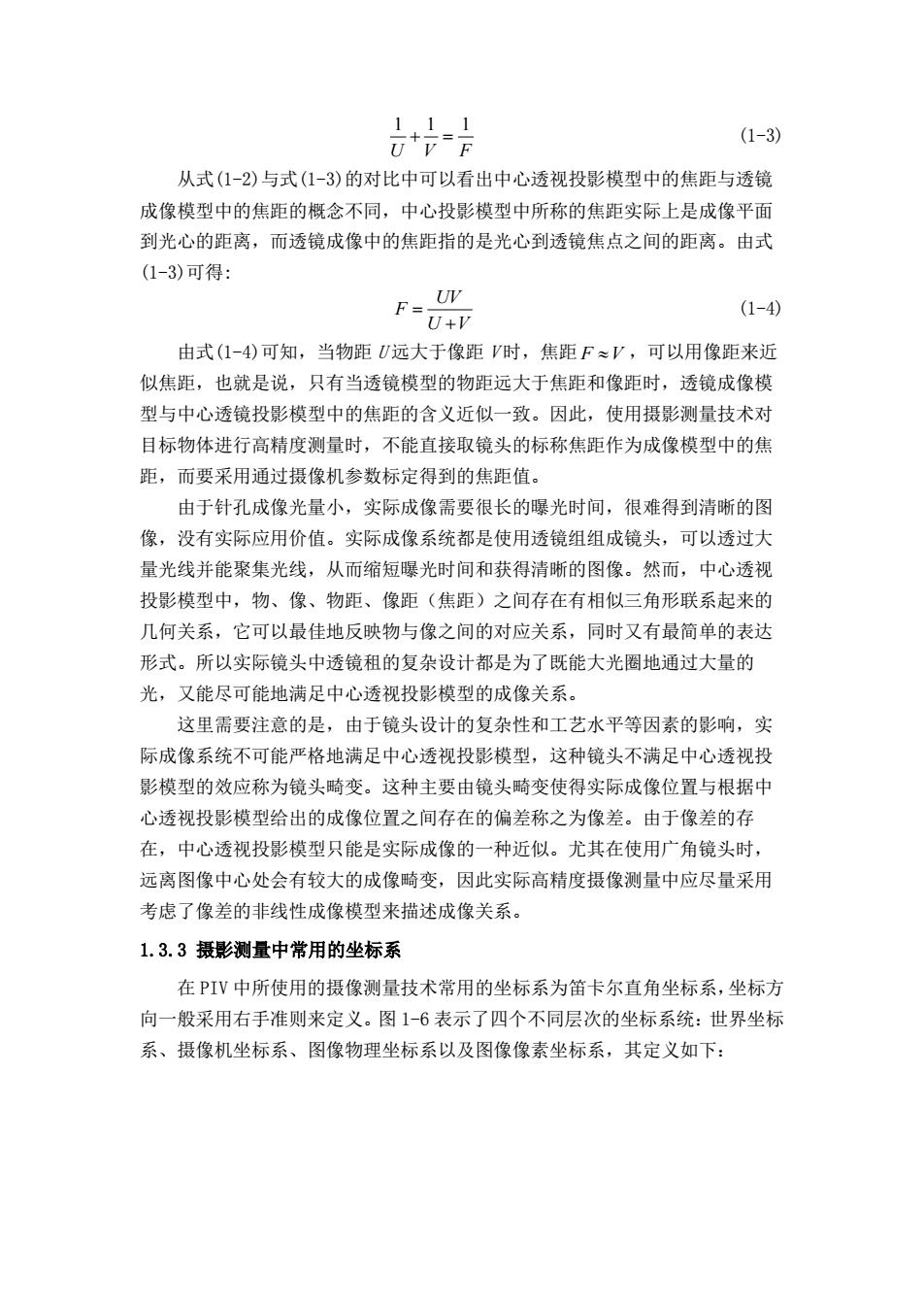
所决定。各种摄像测量任务中,都是基于成像映射关系,确定各种几何与运动参 数。从几何角度来看,摄像成像过程是从三维空间向二维空间的映射,是从高维 空间向低维空间的投影。 1.3.1 中心透视投影模型 中心透视投影又称为针孔模型是立体视觉系统中常用的一种理想的线性摄 像机模型,是对光学成像几何关系的简化。中心透视投影模型假设物体表面的反 射光或发射光都经过一个“针孔”点而投影在像平面上,这个针孔”点称为光心, 也即投影中心或摄影中心。受光的直线传播条件约束,物点、光心和对应像点在 一条直线上。图 1-4 是中心透视投影模型成像,也就是针孔成像的原理示意图。 针孔模型主要由光心、成像面和光轴组成。中心透视投影模型中光心到像面的像 距 v 称为焦距 f,物距 u 等于光心到物体的距离。 f v u O 光心 像 物 p P 图 1-4 中心透视投影模型成像几何模型 根据图 1-4 所示的中心透视投影的几何映射关系,物点 P 到光轴的距离 D 与 对应像点 p 到光轴的距离 d 之间满足式(1-2)。 D d u f (1-2) 1.3.2 透镜成像模型 O 光心 像 物 p P F V U 焦点 图 1-5 透镜成像几何模型 根据几何光学的基本原理,理想的凸透镜成像光路如图 1-5 所示,其中物平 面到透镜中心的距离为物距 U,清晰成像的像平面到透镜中心的距离为像距 V, 透镜焦距为 F,三者满足如式(1-3)所示的成像公式:
111 UVF (1-3) 从式(1-2)与式(1-3)的对比中可以看出中心透视投影模型中的焦距与透镜 成像模型中的焦距的概念不同,中心投影模型中所称的焦距实际上是成像平面 到光心的距离,而透镜成像中的焦距指的是光心到透镜焦点之间的距离。由式 (1-3)可得: Fu (1-4) 由式(1-4)可知,当物距远大于像距V时,焦距F≈V,可以用像距来近 似焦距,也就是说,只有当透镜模型的物距远大于焦距和像距时,透镜成像模 型与中心透镜投影模型中的焦距的含义近似一致。因此,使用摄影测量技术对 目标物体进行高精度测量时,不能直接取镜头的标称焦距作为成像模型中的焦 距,而要采用通过摄像机参数标定得到的焦距值。 由于针孔成像光量小,实际成像需要很长的曝光时间,很难得到清晰的图 像,没有实际应用价值。实际成像系统都是使用透镜组组成镜头,可以透过大 量光线并能聚集光线,从而缩短曝光时间和获得清晰的图像。然而,中心透视 投影模型中,物、像、物距、像距(焦距)之间存在有相似三角形联系起来的 几何关系,它可以最佳地反映物与像之间的对应关系,同时又有最简单的表达 形式。所以实际镜头中透镜租的复杂设计都是为了既能大光圈地通过大量的 光,又能尽可能地满足中心透视投影模型的成像关系。 这里需要注意的是,由于镜头设计的复杂性和工艺水平等因素的影响,实 际成像系统不可能严格地满足中心透视投影模型,这种镜头不满足中心透视投 影模型的效应称为镜头畸变。这种主要由镜头畸变使得实际成像位置与根据中 心透视投影模型给出的成像位置之间存在的偏差称之为像差。由于像差的存 在,中心透视投影模型只能是实际成像的一种近似。尤其在使用广角镜头时, 远离图像中心处会有较大的成像畸变,因此实际高精度摄像测量中应尽量采用 考虑了像差的非线性成像模型来描述成像关系。 1.3.3摄彩测量中常用的坐标系 在PIV中所使用的摄像测量技术常用的坐标系为笛卡尔直角坐标系,坐标方 向一般采用右手准则来定义。图16表示了四个不同层次的坐标系统:世界坐标 系、摄像机坐标系、图像物理坐标系以及图像像素坐标系,其定义如下:
1 1 1 U V F (1-3) 从式(1-2)与式(1-3)的对比中可以看出中心透视投影模型中的焦距与透镜 成像模型中的焦距的概念不同,中心投影模型中所称的焦距实际上是成像平面 到光心的距离,而透镜成像中的焦距指的是光心到透镜焦点之间的距离。由式 (1-3)可得: UV F U V (1-4) 由式(1-4)可知,当物距 U 远大于像距 V 时,焦距 F V ,可以用像距来近 似焦距,也就是说,只有当透镜模型的物距远大于焦距和像距时,透镜成像模 型与中心透镜投影模型中的焦距的含义近似一致。因此,使用摄影测量技术对 目标物体进行高精度测量时,不能直接取镜头的标称焦距作为成像模型中的焦 距,而要采用通过摄像机参数标定得到的焦距值。 由于针孔成像光量小,实际成像需要很长的曝光时间,很难得到清晰的图 像,没有实际应用价值。实际成像系统都是使用透镜组组成镜头,可以透过大 量光线并能聚集光线,从而缩短曝光时间和获得清晰的图像。然而,中心透视 投影模型中,物、像、物距、像距(焦距)之间存在有相似三角形联系起来的 几何关系,它可以最佳地反映物与像之间的对应关系,同时又有最简单的表达 形式。所以实际镜头中透镜租的复杂设计都是为了既能大光圈地通过大量的 光,又能尽可能地满足中心透视投影模型的成像关系。 这里需要注意的是,由于镜头设计的复杂性和工艺水平等因素的影响,实 际成像系统不可能严格地满足中心透视投影模型,这种镜头不满足中心透视投 影模型的效应称为镜头畸变。这种主要由镜头畸变使得实际成像位置与根据中 心透视投影模型给出的成像位置之间存在的偏差称之为像差。由于像差的存 在,中心透视投影模型只能是实际成像的一种近似。尤其在使用广角镜头时, 远离图像中心处会有较大的成像畸变,因此实际高精度摄像测量中应尽量采用 考虑了像差的非线性成像模型来描述成像关系。 1.3.3 摄影测量中常用的坐标系 在 PIV 中所使用的摄像测量技术常用的坐标系为笛卡尔直角坐标系,坐标方 向一般采用右手准则来定义。图 1-6 表示了四个不同层次的坐标系统:世界坐标 系、摄像机坐标系、图像物理坐标系以及图像像素坐标系,其定义如下:
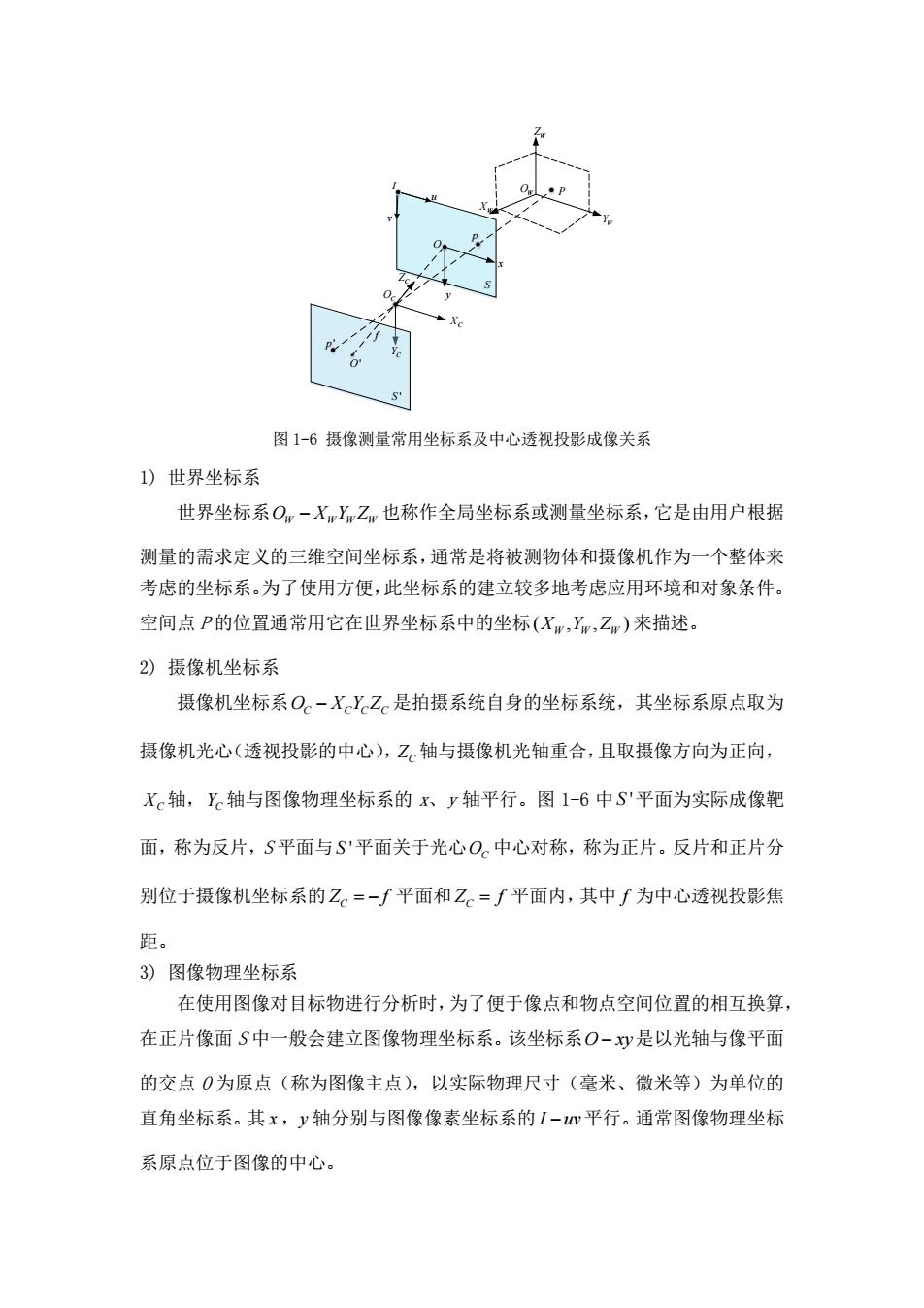
图1-6摄像测量常用坐标系及中心透视投影成像关系 1)世界坐标系 世界坐标系O一XYZ,也称作全局坐标系或测量坐标系,它是由用户根据 测量的需求定义的三维空间坐标系,通常是将被测物体和摄像机作为一个整体来 考虑的坐标系。为了使用方便,此坐标系的建立较多地考虑应用环境和对象条件。 空间点P的位置通常用它在世界坐标系中的坐标(X,Y,Z)来描述。 2)摄像机坐标系 摄像机坐标系O。一XYZ。是拍摄系统自身的坐标系统,其坐标系原点取为 摄像机光心(透视投影的中心),Z。轴与摄像机光轴重合,且取摄像方向为正向, Xc轴,X轴与图像物理坐标系的x、y轴平行。图16中S平面为实际成像靶 面,称为反片,S平面与S平面关于光心O。中心对称,称为正片。反片和正片分 别位于摄像机坐标系的Z。=-∫平面和Z。=∫平面内,其中∫为中心透视投影焦 距。 3)图像物理坐标系 在使用图像对目标物进行分析时,为了便于像点和物点空间位置的相互换算 在正片像面S中一般会建立图像物理坐标系。该坐标系0-y是以光轴与像平面 的交点0为原点(称为图像主点),以实际物理尺寸(毫米、微米等)为单位的 直角坐标系。其x,y轴分别与图像像素坐标系的I-m平行。通常图像物理坐标 系原点位于图像的中心
OC O P XW YW ZW XC YC x y u v p p ' O' OW S S ' I f ZC 图 1-6 摄像测量常用坐标系及中心透视投影成像关系 1) 世界坐标系 世界坐标系 O X Y Z W W W W 也称作全局坐标系或测量坐标系,它是由用户根据 测量的需求定义的三维空间坐标系,通常是将被测物体和摄像机作为一个整体来 考虑的坐标系。为了使用方便,此坐标系的建立较多地考虑应用环境和对象条件。 空间点 P 的位置通常用它在世界坐标系中的坐标 ( , , ) X Y Z W W W 来描述。 2) 摄像机坐标系 摄像机坐标系 O X Y Z C C C C 是拍摄系统自身的坐标系统,其坐标系原点取为 摄像机光心(透视投影的中心),ZC 轴与摄像机光轴重合,且取摄像方向为正向, XC 轴, YC 轴与图像物理坐标系的 x、y 轴平行。图 1-6 中 S ' 平面为实际成像靶 面,称为反片,S 平面与 S ' 平面关于光心 OC 中心对称,称为正片。反片和正片分 别位于摄像机坐标系的 Z f C 平面和 Z f C 平面内,其中 f 为中心透视投影焦 距。 3) 图像物理坐标系 在使用图像对目标物进行分析时,为了便于像点和物点空间位置的相互换算, 在正片像面 S 中一般会建立图像物理坐标系。该坐标系 O xy 是以光轴与像平面 的交点 O 为原点(称为图像主点),以实际物理尺寸(毫米、微米等)为单位的 直角坐标系。其 x ,y 轴分别与图像像素坐标系的 I uv 平行。通常图像物理坐标 系原点位于图像的中心
4)图像像素坐标系 如图16所示,图像像素坐标系1-y是以图像左上角点1为原点,以像素 (Pixel)为坐标单位的直角坐标系。x,y分别表示该像素在数字图像中的列数与 行数,与数字图像像素的常用存储格式一致。图像像素坐标系通常也称为图像坐 标系,该坐标系是进行PIV图像分析程序设计时较为常用的坐标系。 中心透视投影成像的基本关系是所有的成像光线都通过光心,并且物点、像 点和光心三点共线。设物点P在世界坐标系On-XwYrZr中的坐标为 (Xw,Y,Z)。P经过中心透视投影得到的像点P的图像坐标为(化,)。由于存在 像差,实际成像点(代,)与中心透视投影像点(x,)之间会存在偏差,因此,在进 行PIV实验时需要对(住,)进行校正,而点(x,)称为理想像点。 1.3.4二维平面摄像测量 在二维PIV测量中,仅对激光片上的粒子进行追踪,此时有效的粒子均分布 在同一物平面内,即示踪粒子的运动、拓扑变化都在同一平面内,这时用一台摄 像机就可以测量得到各种所需几何结构和运动参数。根据中心透视投影模型,可 以直接导出单台相机测量物平面内目标运动参数的算法。 图1-7单相机平面摄像测量基本原理 如图1-7所示,如果测量平面(如V实验中的激光片)与相机光轴垂直, 即与像面平行,则根据中心透视投影关系可知,目标及其所成的像满足相似关系, 且只相差一个比例系数。此时只要从图像上提取所需目标的几何参数,乘上这个 比例系数,就得到空间物体的实际几何参数。然后再结合序列图像的时间轴信息, 便可以得到物体的运动参数。然而,当物体在同一平面内分布,但此物体平面与 摄像机光轴不垂直时,则不能直接根据一个比例系数便还原物体结构信息。此时 若光轴与物平面的夹角已知,则可以先通过角度投影变换,将图像校正成像面与
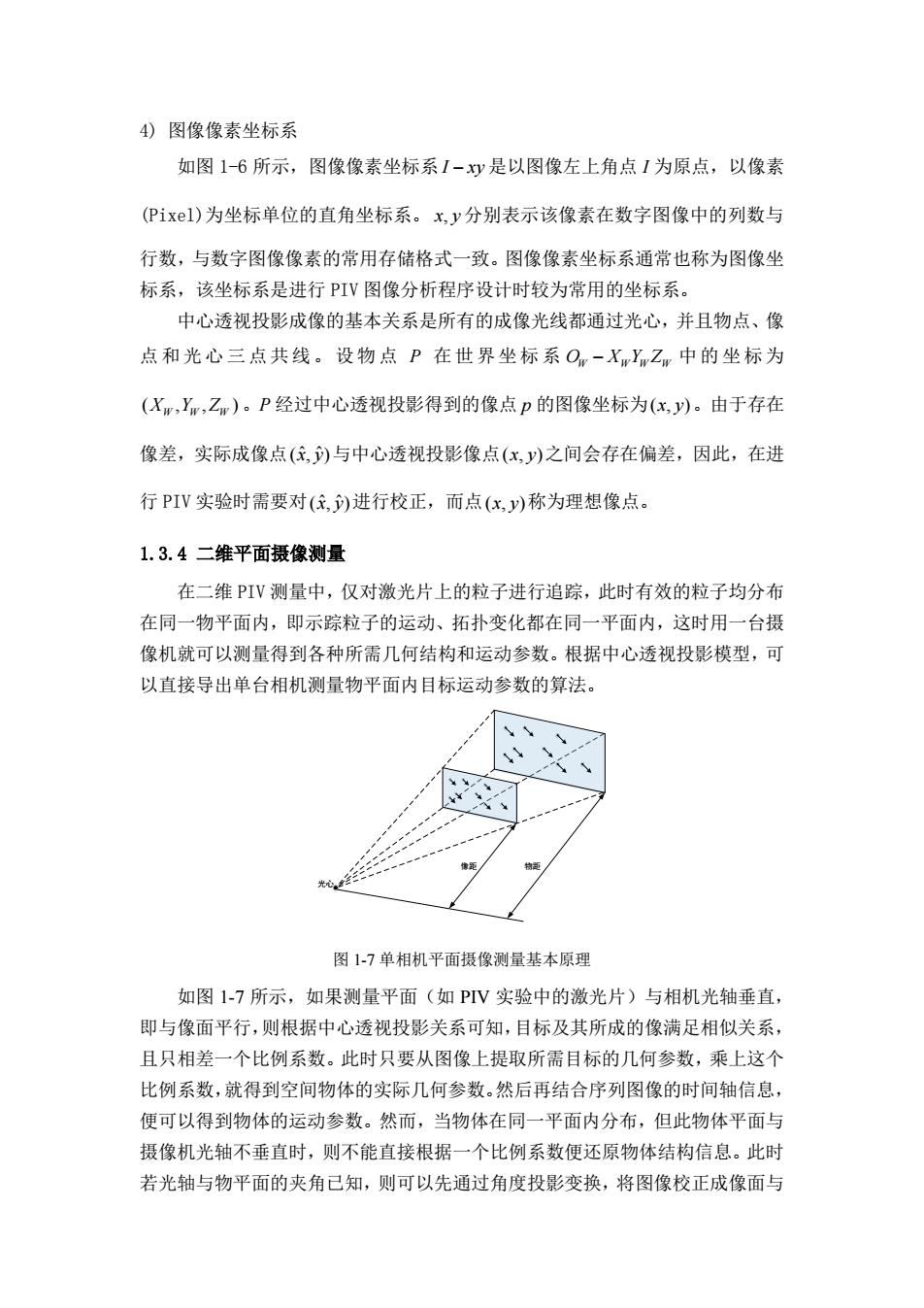
4) 图像像素坐标系 如图 1-6 所示,图像像素坐标系 I xy 是以图像左上角点 I 为原点,以像素 (Pixel)为坐标单位的直角坐标系。 x y, 分别表示该像素在数字图像中的列数与 行数,与数字图像像素的常用存储格式一致。图像像素坐标系通常也称为图像坐 标系,该坐标系是进行 PIV 图像分析程序设计时较为常用的坐标系。 中心透视投影成像的基本关系是所有的成像光线都通过光心,并且物点、像 点 和 光 心 三 点 共线。 设 物 点 P 在 世 界坐 标 系 O X Y Z W W W W 中的坐标为 ( , , ) X Y Z W W W 。P 经过中心透视投影得到的像点 p 的图像坐标为 ( , ) x y 。由于存在 像差,实际成像点 ( , ) x y ˆ ˆ 与中心透视投影像点 ( , ) x y 之间会存在偏差,因此,在进 行 PIV 实验时需要对 ( , ) x y ˆ ˆ 进行校正,而点 ( , ) x y 称为理想像点。 1.3.4 二维平面摄像测量 在二维 PIV 测量中,仅对激光片上的粒子进行追踪,此时有效的粒子均分布 在同一物平面内,即示踪粒子的运动、拓扑变化都在同一平面内,这时用一台摄 像机就可以测量得到各种所需几何结构和运动参数。根据中心透视投影模型,可 以直接导出单台相机测量物平面内目标运动参数的算法。 光心 像距 物距 图 1-7 单相机平面摄像测量基本原理 如图 1-7 所示,如果测量平面(如 PIV 实验中的激光片)与相机光轴垂直, 即与像面平行,则根据中心透视投影关系可知,目标及其所成的像满足相似关系, 且只相差一个比例系数。此时只要从图像上提取所需目标的几何参数,乘上这个 比例系数,就得到空间物体的实际几何参数。然后再结合序列图像的时间轴信息, 便可以得到物体的运动参数。然而,当物体在同一平面内分布,但此物体平面与 摄像机光轴不垂直时,则不能直接根据一个比例系数便还原物体结构信息。此时 若光轴与物平面的夹角已知,则可以先通过角度投影变换,将图像校正成像面与
物面平行的情况,使得两者满足相似关系,之后再进行比例变化。 常见的二维平面测量主要有物体二维几何位置、尺寸、形状、变形测量、位 移和速度的测量。其基本原理是利用单幅图像进行目标几何参数测量,或利用不 同时刻在同一角度拍摄的图像,测量图像目标的变化和运动参数。 根据前述内容可知,在二维平面摄像测量中,像与物之间的比例系数的准确 确定至关重要。如果物平面内能够提供某个方向上某对象的已知尺寸,则可以得 到目标在物平面该方向上的几何或运动参数与目标成像之间的比例关系,完成测 量。最常用、简单的方法是在测量物面上放置带有物理尺寸己知的标尺或参照物, 然后在进行摄影测量前先拍照此标尺或参照物,得到此平面测量的比例系数,最 后根据得到的这个比例关系将像素坐标转换为标识物体尺度的物理坐标,这便是 二维摄影测量的一种定标方式。 1.3.5三维交汇测量 如前所述,摄影测量的基本成像模型是中心投影模型(针孔模型)。在满足 针孔模型假设的前提下,像点、光心和物点满足共线方程,即三点共线。对于 单摄像机的情况,如果光心和像点己知,就可以确定一条成像光线,而对应的 物点必然也在此直线上。但是,此时仅能确定成像光线与光轴之间的夹角而无 法确定物点在此直线上的具体位置。因此在没有其他附加条件的约束下,仅用 单个摄像机是无法确定目标的三维位置的。 当使用两台或多台摄像机从不同的角度对同一目标拍摄时,各个摄像机的 光心和其对应同名像点组成的射线应该都通过同一空间物点,即各成像光线应 在物点相交。利用这个原理就可以对空间物点进行交会定位。这就是摄像测量 学三维交会定位的基本原理,也就是三角摄影测量的基本原理。 O,相机1 图18双目交会测量原理 图1-8为两台摄像机对空间某一粒子成像的示意图,该空间粒子为两台摄 像机光心和相应的像点组成的射线的交点。理论上这两射线应该相交与一点。 但是由于实际摄像系统与成像模型之间总存在各种误差,特别是图像上粒子提
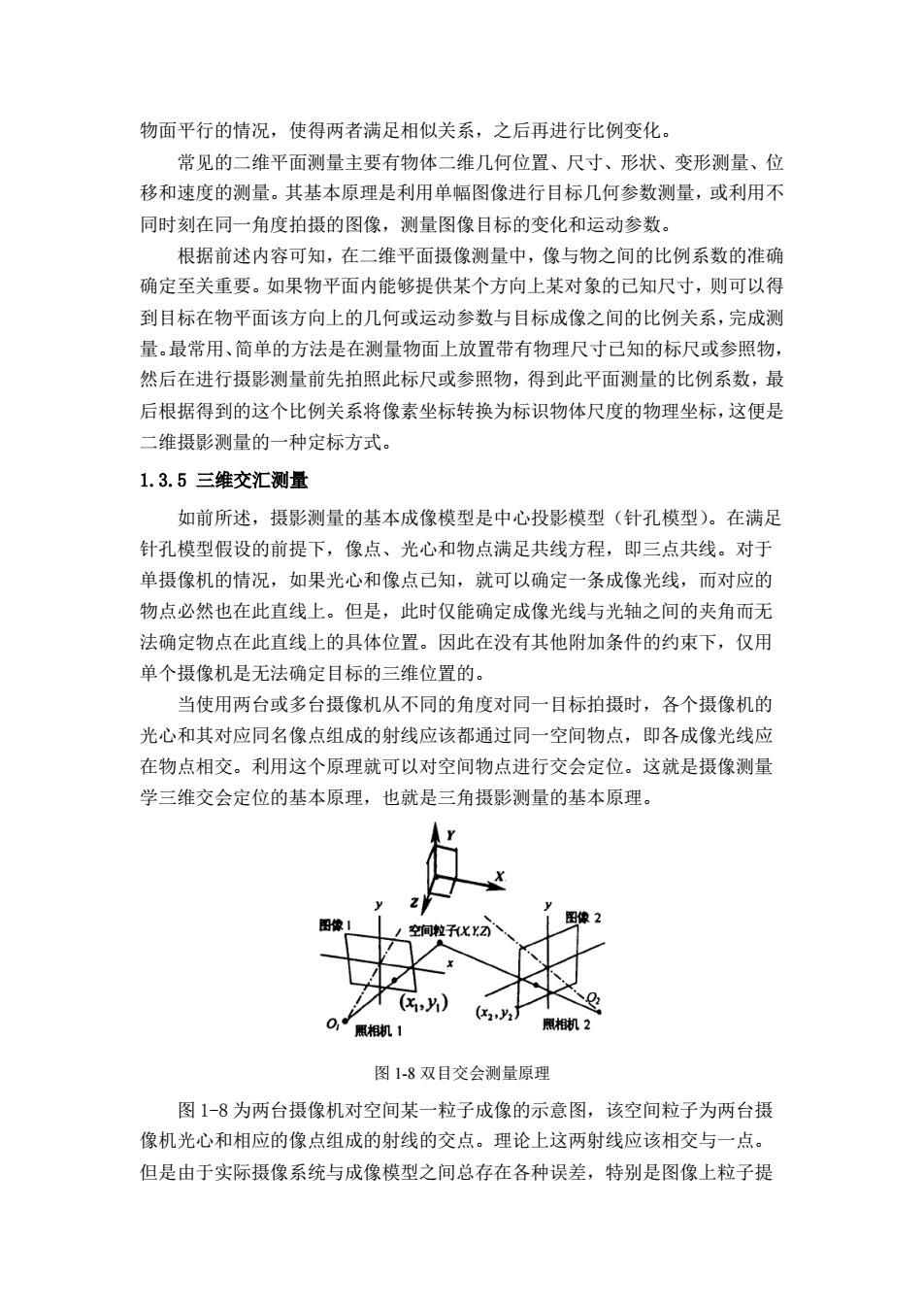
物面平行的情况,使得两者满足相似关系,之后再进行比例变化。 常见的二维平面测量主要有物体二维几何位置、尺寸、形状、变形测量、位 移和速度的测量。其基本原理是利用单幅图像进行目标几何参数测量,或利用不 同时刻在同一角度拍摄的图像,测量图像目标的变化和运动参数。 根据前述内容可知,在二维平面摄像测量中,像与物之间的比例系数的准确 确定至关重要。如果物平面内能够提供某个方向上某对象的已知尺寸,则可以得 到目标在物平面该方向上的几何或运动参数与目标成像之间的比例关系,完成测 量。最常用、简单的方法是在测量物面上放置带有物理尺寸已知的标尺或参照物, 然后在进行摄影测量前先拍照此标尺或参照物,得到此平面测量的比例系数,最 后根据得到的这个比例关系将像素坐标转换为标识物体尺度的物理坐标,这便是 二维摄影测量的一种定标方式。 1.3.5 三维交汇测量 如前所述,摄影测量的基本成像模型是中心投影模型(针孔模型)。在满足 针孔模型假设的前提下,像点、光心和物点满足共线方程,即三点共线。对于 单摄像机的情况,如果光心和像点已知,就可以确定一条成像光线,而对应的 物点必然也在此直线上。但是,此时仅能确定成像光线与光轴之间的夹角而无 法确定物点在此直线上的具体位置。因此在没有其他附加条件的约束下,仅用 单个摄像机是无法确定目标的三维位置的。 当使用两台或多台摄像机从不同的角度对同一目标拍摄时,各个摄像机的 光心和其对应同名像点组成的射线应该都通过同一空间物点,即各成像光线应 在物点相交。利用这个原理就可以对空间物点进行交会定位。这就是摄像测量 学三维交会定位的基本原理,也就是三角摄影测量的基本原理。 图 1-8 双目交会测量原理 图 1-8 为两台摄像机对空间某一粒子成像的示意图,该空间粒子为两台摄 像机光心和相应的像点组成的射线的交点。理论上这两射线应该相交与一点。 但是由于实际摄像系统与成像模型之间总存在各种误差,特别是图像上粒子提