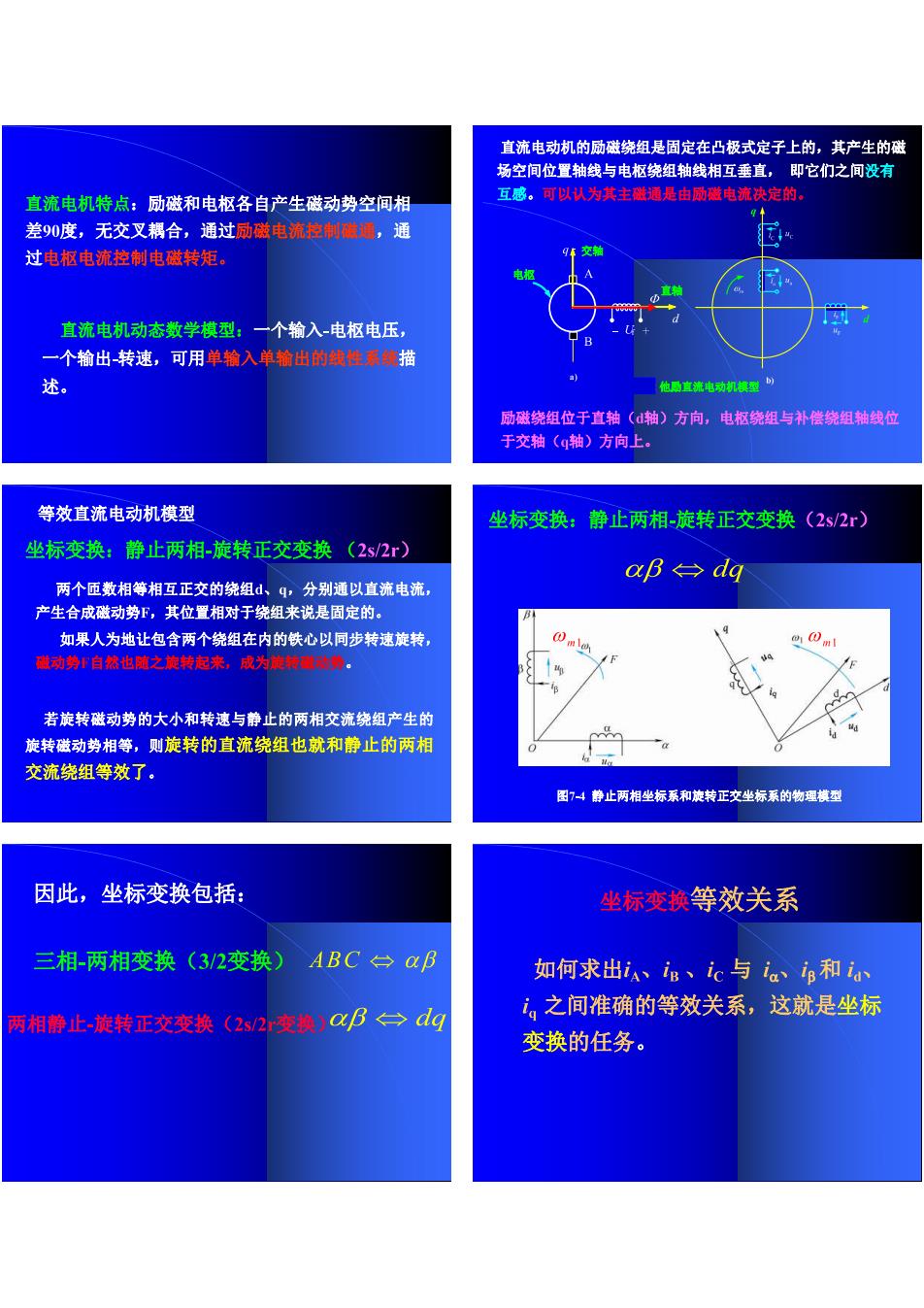
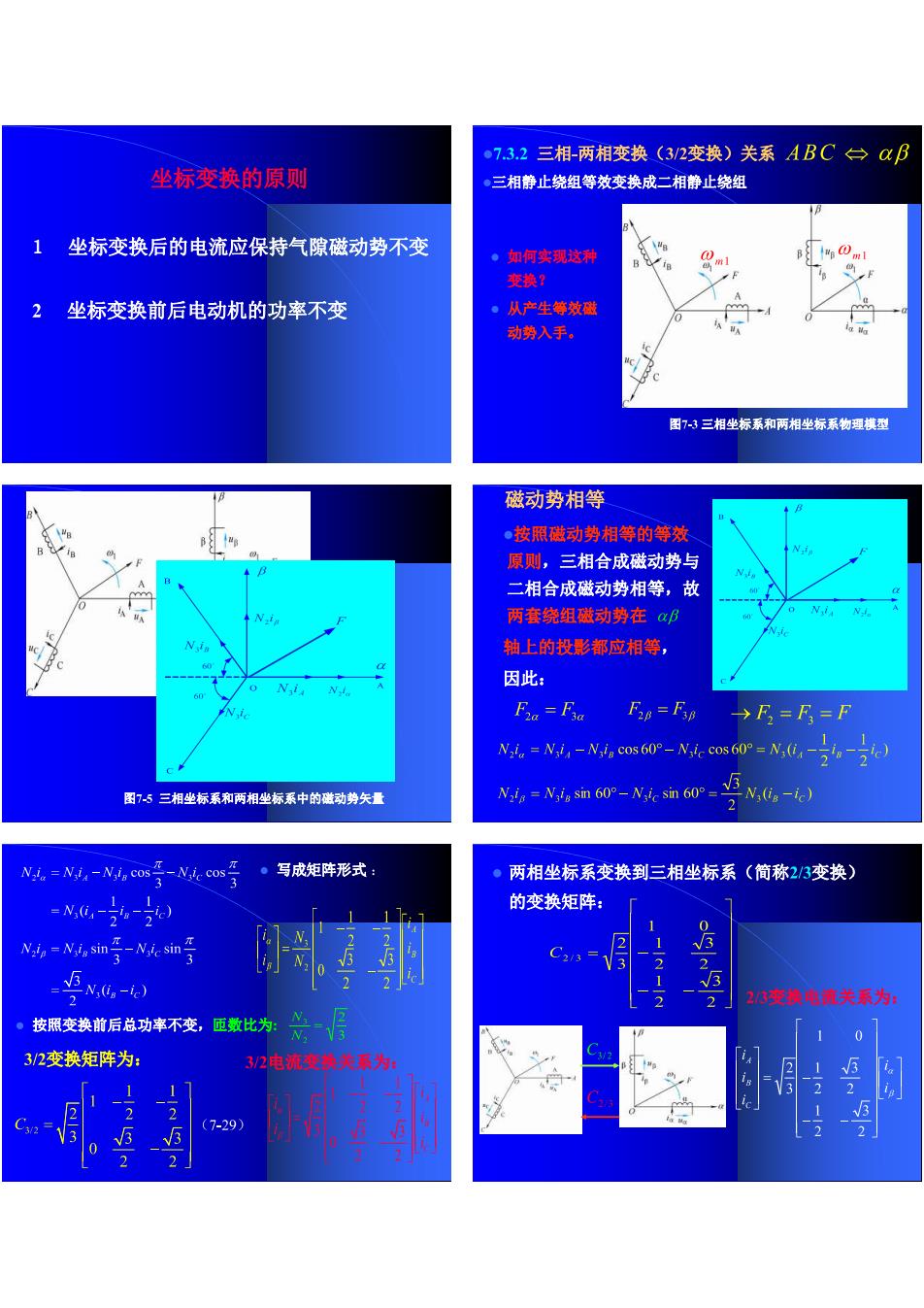
直流电动机的励磁绕组是固定在凸极式定子上的,其产生的磁 场空间位置轴线与电枢绕组轴线相互垂直,即它们之间设有 直流电机特点:励磁和电枢各自产生磁动势空间相 可以认为主通是由师电流决定 差0度,无交叉耦合,通过励磁电流牌刺健塘,通 过电躯电流控制电感转矩。 直流电机动态数学模型:一个输入-电枢电压, 一个输出转速,可用单输入单输出的线性系镜描 他师直流电列 肠磁绕组位于直轴 轴)方向,电绕组与补偿绕组轴线位 于交轴(轴)方向上。 等效直流电动机模型 坐标变换:静止两相-旋转正交变换(2s/2r) 坐标变换:静止两相-旋转正交变换(2s/2r) aB←→dg 两个匝数相等相互正交的绕组d、4,分别通以直流电流, 产生合成磁动势下,其位置相对于绕组来说是固定的。 如果人为地让包含两个绕组在内的铁心以同步转速旋转 童动物自然也简之黄转起来,成为 若旋转磁动势的大小和转速与静止的两相交流绕组产生的 旋转磁动势相等,则旋转的直流绕组也就和静止的两相 交流绕组等效了 国74静止两相坐标系和转正交 坐标系的物理型 因此,坐标变换包括 坐标变换等效关系 三相-两相变换(3/2变换) ABC aB 如何求出ia、ig、ic与a、g和i 啊相静止-炭转正交变换(22r变典)B←→d化 之间准确的等效关系,这就是坐标 变换的任务
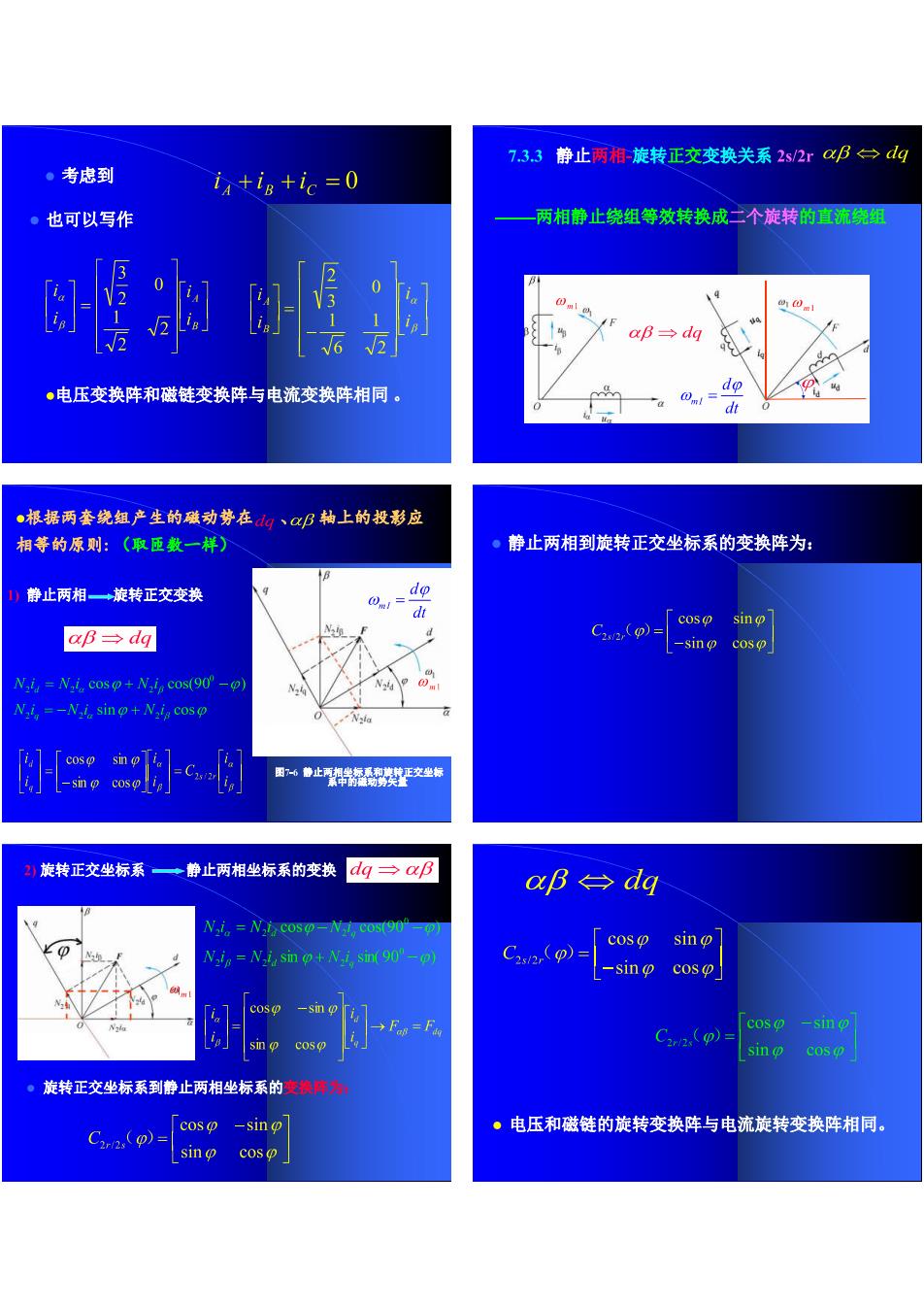
●7.3.2三相-两相变换(3/2变换)关系ABC台a阝 坐标变换的原则 ·三相静止绕组等效变换成二相静止绕组 1 坐标变换后的电流应保持气隙磁动势不变 ·如同实现这为 变换 2 坐标变换前后电动机的功率不变 ·从产生等效微 动势入平。 图73三相坐标系和两相坐标系物理横型 磁动势相等 ■按照磁动势相等的等效 原则,三相合成磁动势与 二相合成磁动势相等,故 两套绕组磁动势在a印 轴上的投影都应相等, 因此: F2n=F →F=F=F !-N cos60-N,lc cos 60=N() 图75三相坐标系和两相坐标系中的磁喇势矢量 =sin 60-N,ie sin 60N,(i-ic) N=N -cos 。写成矩阵形式 两相坐标系变换到三相坐标系(简称2/3变换) -N6-。-) 的变换矩阵: ·装照变款前后总功率不变。重康比秀兰一得 10 3/2变换矩阵为: 1 1 (7-29)
7.33静止两帽旋转正交变换关系2s/2rB台dg 。考虑到 iatin +ic=0 。也可以写作 一两相静止绕组等效转换成个旋转的直流绕组 19 a→dg 电压变换阵和磁链变换阵与电流变换阵相同 ●根据两套绕组产生的磁动势在山、αB上的投影应 相等的原则:(取匝数一样) 。静止两相到旋转正交坐标系的变换阵为: 静止两相一→莱转正交变挨 do p→dg C-csp sin c N.i-N cos+i cos(9 Ni =-i sino+N,i cos [c 燕转正交坐标系一静止两相坐标系的变换dg→ aB→dg N.=Ni cos-N cos(90 N.i=N.i sin +N.i,sin(90) C3(p) [coso sino -sin cos cos -sin C)= sin 。旋转正交坐标系到静止两相坐标系的变牌 。电压和磁链的旋转变换阵与电流旋转变换阵相同, C() cosp sin cos
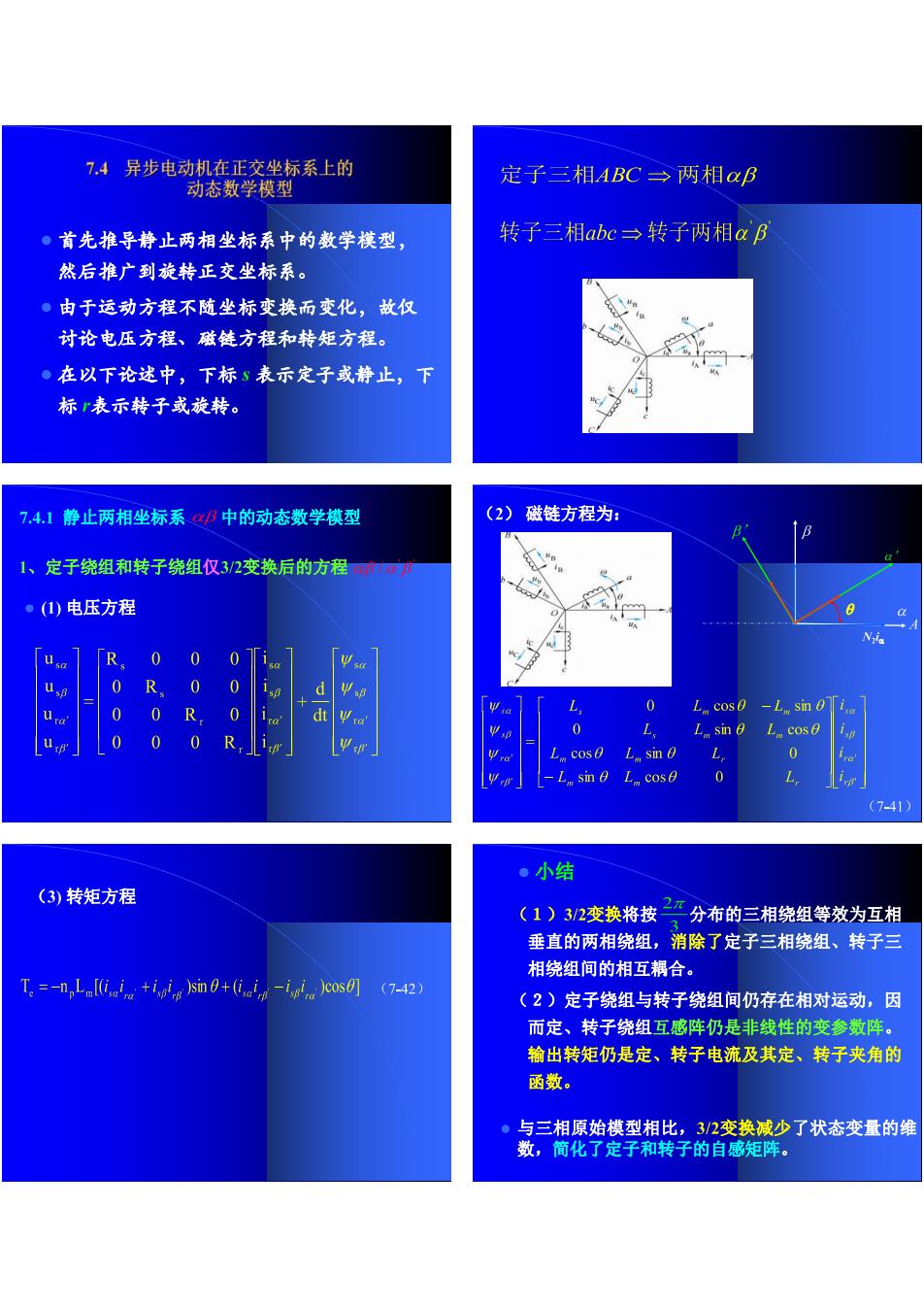
7.4异步电动机在正交坐标系上的 定子三相ABC→两相aB 动态数学模型 ○首先推导静止两相坐标系中的数学模型, 转子三相abc三转子两相aB 然后推广到旋转正交坐标系。 。由于运动方程不随坐标变换而变化,故仅 讨论电压方程、磁链方程和转矩方程。 在以下论述中,下标表示定子或静止,下 标表示转子或旋转。 7.4.1静止两相坐标系中的动态数学模型 (2)磁链方程为: 1、定子绕组和转子绕组仅3/2变换后的方程m ●(1)电压方程 -L si 0 L cos 0 小结 (3)转矩方程 (1)3/2变换将按 2红分布的三相绕组等效为互相 垂直的两相绕组,消除了定子三相绕组、转子三 相绕组间的相互耨合。 T.=-npLa(i+i)sn +(iiii )cos](742) (2)定子绕组与转子绕组间仍存在相对运动,因 而定、转子绕组互感阵仍是非线性的变参数阵。 输出转矩仍是定、转子电流及其定、转子夹角的 函数。 3/2变换减少了状态变量的 子和转子的自成

2、静止两相坐标系中的方程(a) aB三aB )ne的关系: cose -sine xB→caB C2.(0= N.i,=N,i cos0-N.i,sin0 N.i=N.i sin0+N,i,cos0 N 转子两相αB→定子两相aB变换系数矩阵为 C(0)=[cos0 -sino] 2)静止两相坐标系中的电压方程(aB): 。静止两相坐标系中的磁链方程(aB): 0 DV. 。静止两相坐标系中的转矩方程 。结论: ·旋转变换改变了定、转子绕组间的耦合关系, T。=nLn(daa-iin) 7-46 将相对运动的定、转子绕组用相对静止的等效 绕组来代替,消除了定、转子绕组间夹角对磁 链和转矩的影响。 T.=-n,Ln【ii。+i)sin0+0.g-i.eos0 ·旋转变换的优点在于将非线性变参数的磁链方程 转化为线性定常的方程,但却加剧了电压方程中 7-42 的非线性耦合程度,将矛盾从磁链方程转移到电 压方程中了,并没有改变对象的非线性合性