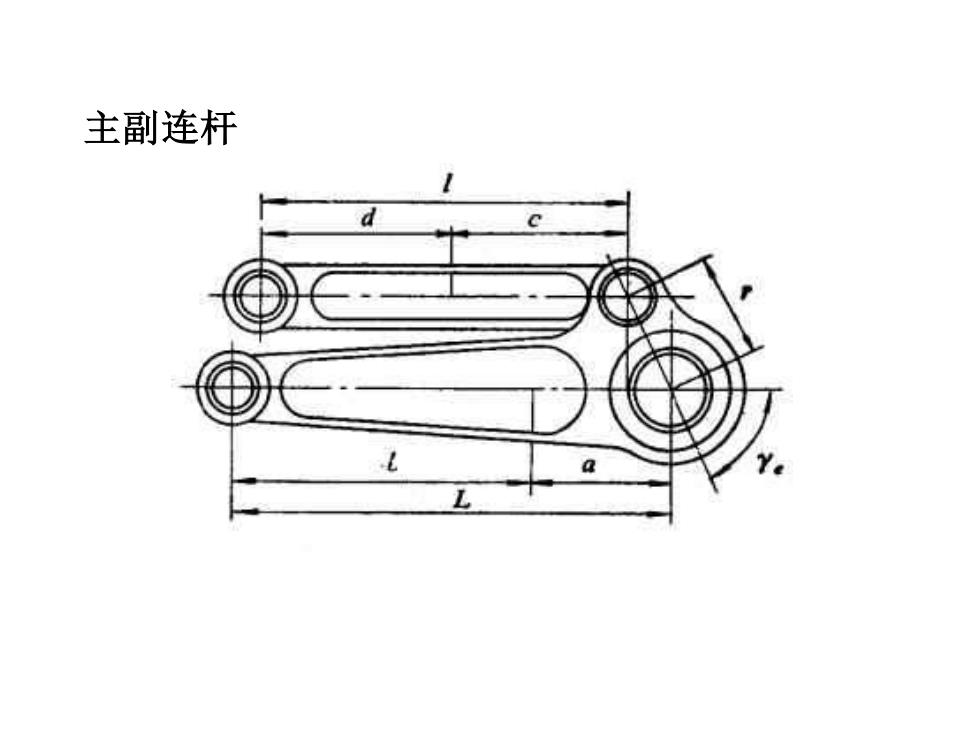
主副连杆
主副连杆
曲柄的运动规律 曲柄视为等角速度回转。 曲柄的角速度:w=2元n/60=πn/30(rad/s) 曲柄销中心点的切向速度和向心加速度: u-Ro (m/s) a,=Ro2 (m/s2) n-曲柄回转速度 R-曲柄半径
曲柄视为等角速度回转。 曲柄的角速度:ω=2πn/60=πn/30 (rad/s) 曲柄销中心点的切向速度和向心加速度: ut=Rω (m/s) an= Rω2 (m/s2 ) n-曲柄回转速度 R-曲柄半径 曲柄的运动规律
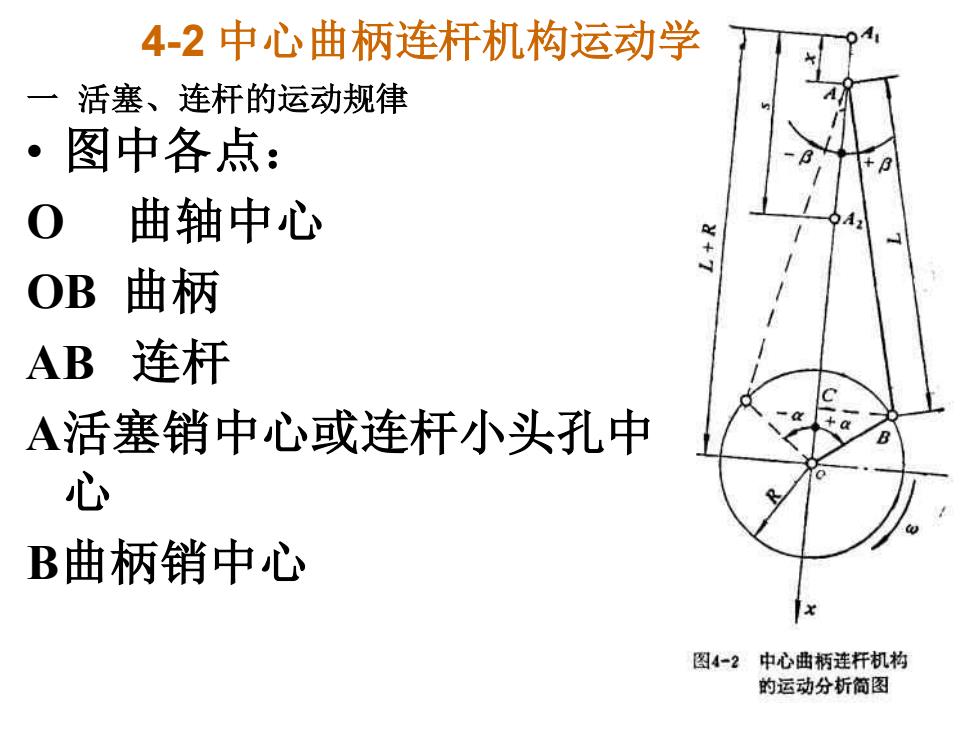
4-2中心曲柄连杆机构运动学 一活塞、连杆的运动规律 。图中各点: 曲轴中心 OB 曲柄 AB 连杆 A活塞销中心或连杆小头孔中 心 B曲柄销中心 图4-2中心曲柄连杆机构 的运动分析简图
一 活塞、连杆的运动规律 • 图中各点: O 曲轴中心 OB 曲柄 AB 连杆 A活塞销中心或连杆小头孔中 心 B曲柄销中心 4-2 中心曲柄连杆机构运动学
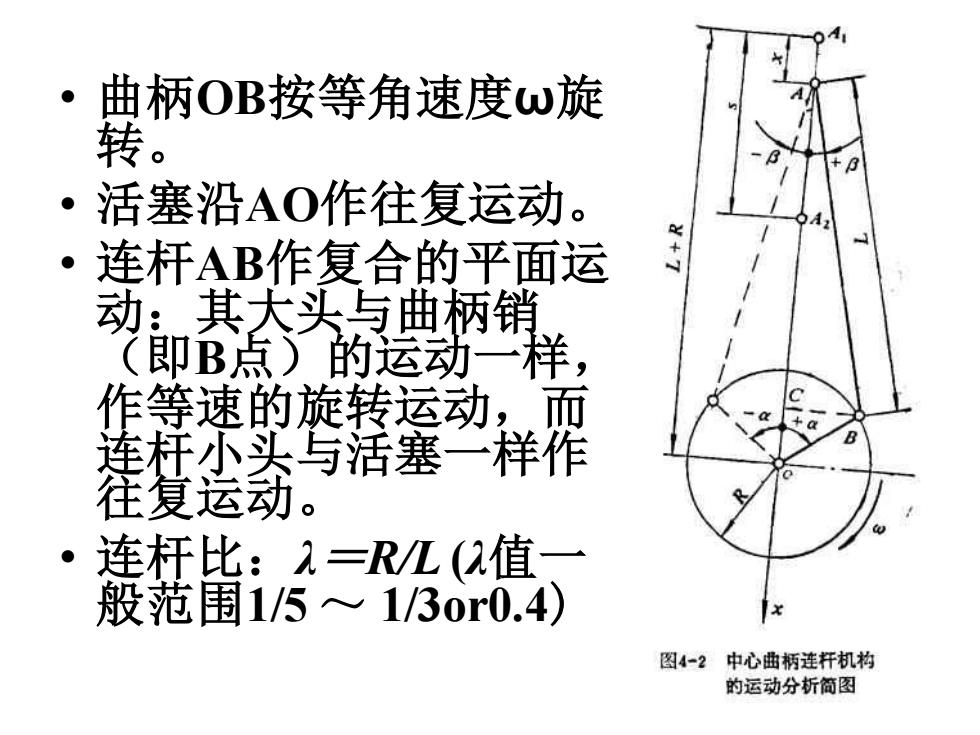
曲柄OB按等角速度ω旋 转。 ·活塞沿AO作往复运动。 连杆AB作复合的平面运 动:其大头与曲柄销 (即B点)的运动一样, 作等速的旋转运动,而 连杆小头与活塞一样作 往复运动。 连杆比:2=RL(2值一 般范围1/5~1/3or0.4) 图4-2中心曲柄连杆机构 的运动分析简图
• 曲柄OB按等角速度ω旋 转。 • 活塞沿AO作往复运动。 • 连杆AB作复合的平面运 动:其大头与曲柄销 (即B点)的运动一样, 作等速的旋转运动,而 连杆小头与活塞一样作 往复运动。 • 连杆比:λ=R/L (λ值一 般范围1/5 ~ 1/3or0.4)
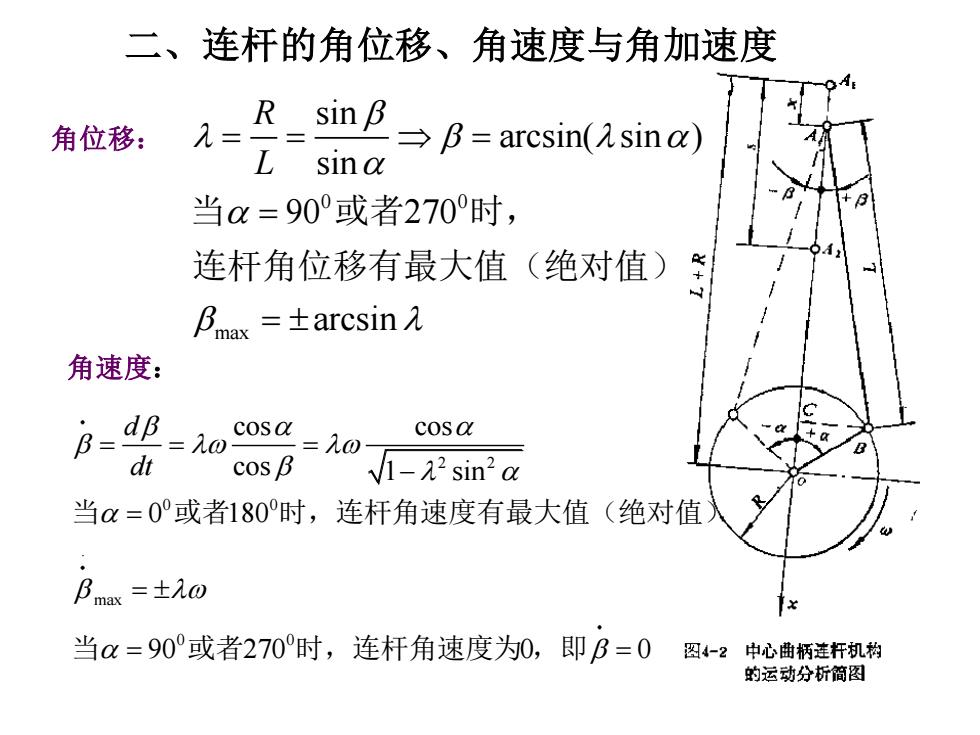
二、连杆的角位移、角速度与角加速度 角位移: R_sinE→B=arcsin(元sinW) 当=90°或者270°时, 连杆角位移有最大值(绝对值) Bmax=±arcsin入 角速度: B=dB=1 cosa=10- cosa dt cos B 1-2sin2a 当α=0°或者180时,连杆角速度有最大值(绝对值 Bmx=±九0 当=90°或者270°时,连杆角速度为0,即B=0图-2中心豳柄莲杆机构 的运动分析简图
0 0 max sin arcsin( sin ) sin 90 270 arcsin R L = = = = = 当 或者 时, 连杆角位移有最大值(绝对值) 角位移: 角速度: 2 2 0 0 . max 0 0 cos cos cos 1 sin 0 180 90 270 0 0 d dt = = = − = = = = 当 或者 时,连杆角速度有最大值(绝对值) 当 或者 时,连杆角速度为 ,即 二、连杆的角位移、角速度与角加速度