
第五章突触动力学Ⅱ:有监督学习 当现有的先验知识不完全时,就需要学习。学习的方式 取决于这一先验信息不完全的程度。在监督学习过程中,假 设已知未来学习系统的期望响应,并且使用期望值与实际值 的差值(即学习系统的误差)去修正系统的行为。而在非监 督学习中是不了解学习系统的期望响应的。 ---Ya.Z.Tsypkin 神经网络通过向环境获取知识并改进自身性能。一般是 按某种预定的度量调节自身的参数(如权值)随时间逐步达 到的。 ----B.F.Skinner
第五章 突触动力学Ⅱ:有监督学习 当现有的先验知识不完全时,就需要学习。学习的方式 取决于这一先验信息不完全的程度。在监督学习过程中,假 设已知未来学习系统的期望响应,并且使用期望值与实际值 的差值(即学习系统的误差)去修正系统的行为。而在非监 督学习中是不了解学习系统的期望响应的。 ----Ya.Z.Tsypkin 神经网络通过向环境获取知识并改进自身性能。一般是 按某种预定的度量调节自身的参数(如权值)随时间逐步达 到的。 ----B.F.Skinner

本章论述要点: 神经网络的分类: 按网络结构分为:反馈网络和前馈网络; 按学习方式分为:监督学习和非监督学习。 本章论述内容: 前馈网络的监督学习算法,包括感知器算法、最小均方误差算法和 反向传播(BP)算法。 理论基础: 本章论述了监督学习是对未知平均误差层的随机近似,即给定观察 得到的随机矢量样本对: (x1,y),(x2,2),…(xmym) 要估计一个未知函数:f:x一y,并且使期望误差函数EU]最小。误 差定义为期望特性与实际特性之差
本章论述要点: 神经网络的分类: 按网络结构分为:反馈网络和前馈网络; 按学习方式分为:监督学习和非监督学习。 本章论述内容: 前馈网络的监督学习算法,包括感知器算法、最小均方误差算法和 反向传播(BP) 算法。 理论基础: 本章论述了监督学习是对未知平均误差层的随机近似,即给定观察 得到的随机矢量样本对: 1 1 2 2 ( , ), ( , ), ( , ) m m x y x y x y 要估计一个未知函数:f : x—y,并且使期望误差函数E[J]最小。误 差定义为期望特性与实际特性之差
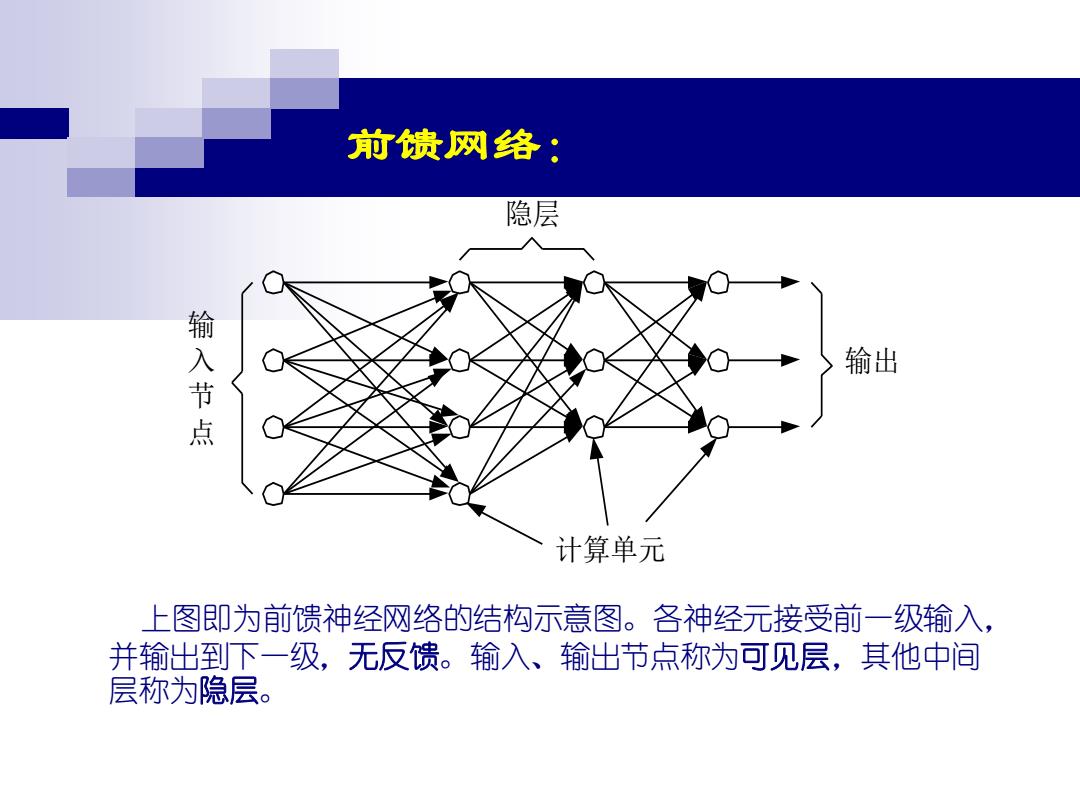
前债网络: 隐层 输 入节点 输出 计算单元 上图即为前馈神经网络的结构示意图。各神经元接受前一级输入, 并输出到下一级,无反馈。输入、输出节点称为可见层,其他中间 层称为隐层
前馈网络: 输出 隐层 输 入 节 点 计算单元 上图即为前馈神经网络的结构示意图。各神经元接受前一级输入, 并输出到下一级,无反馈。输入、输出节点称为可见层,其他中间 层称为隐层
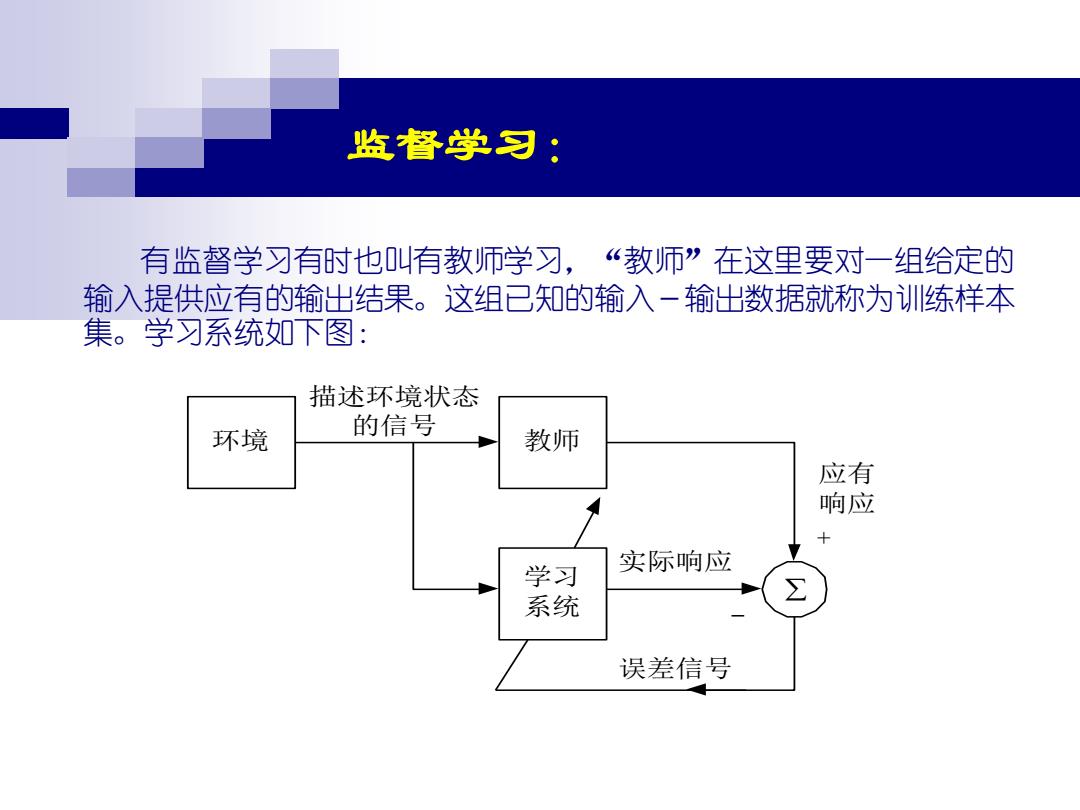
监督学习; 有监督学习有时也叫有教师学习,“教师”在这里要对一组给定的 输入提供应有的输出结果。这组已知的输入一输出数据就称为训练样本 集。学习系统如下图: 描述环境状态 环境 的信号 教师 应有 响应 学习 实际响应 系统 误差信号
监督学习: 有监督学习有时也叫有教师学习,“教师”在这里要对一组给定的 输入提供应有的输出结果。这组已知的输入-输出数据就称为训练样本 集。学习系统如下图: 环境 教师 学习 系统 实际响应 误差信号 应有 响应 描述环境状态 的信号 + -
论述内容: >有监督的函数估计 >有监督的学习相当于操作性条件反射 >有监督的学习相当于有先验知识的随机模式学习 >算法,感知器,LMS,BP
➢ 有监督的函数估计 ➢ 有监督的学习相当于操作性条件反射 ➢ 有监督的学习相当于有先验知识的随机模式学习 ➢ 算法,感知器,LMS,BP 论述内容: