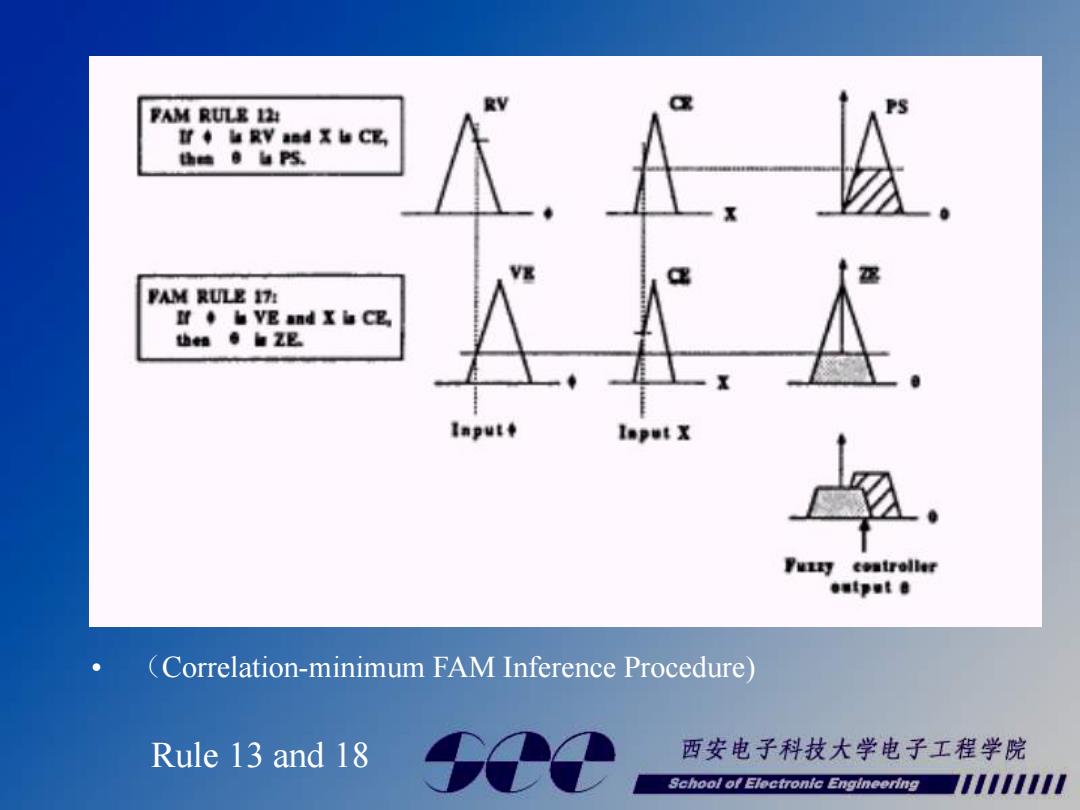
FAM RULE1出 r◆RY and i CE thes PS. FAM RULE 17: ◆VE and X i CE h领。加Z昆 &」 Input laput X Furry comtroller entpat 6 (Correlation-minimum FAM Inference Procedure) Rule 13 and 18 22 西安电子科技大学电子工程学院 School of Electronte Engineering 11111111
• (Correlation-minimum FAM Inference Procedure) Rule 13 and 18
>Each FAM rule emitted a fit-weighted output fuzzy set o at each iteration >The total output O added these weighted outputs 0=∑0,=∑mimS,f) fdenotes the anteacedent fit value and S,represents the sequent fuzzy set of steering-angule valus in tne ith FAM rule 以前的fuzzy system用pairwise maximum来合并输出 序列Oi,但这会使得当FAM规则数增多时,产生一个 固定的输出序列O。 西安电子科技大学电子工程学院 School of Electronte Engineering 1111
oi min( , ) i i i i i O O S f i f ØEach FAM rule emitted a fit-weighted output fuzzy set at each iteration ØThe total output O added these weighted outputs denotes the anteacedent fit value and represents the sequent fuzzy set of steering-angule valus in tne ith FAM rule Si 以前的fuzzy system用pairwise maximum 来合并输出 序列Oi.但这会使得当FAM规则数增多时,产生一个 固定的输出序列O

对于输出序列需要解(去)模糊 Maximum fit value Centroid defuzzification 之0,mo9, 0= mo(0,) tce 西安电子科技大学电子工程学院 School of Electronte Engineering 111I111
对于输出序列需要解(去)模糊 p j j p j j j mo mo 1 1 ( ) ( ) ØMaximum fit value ØCentroid defuzzification

Kosto系统仿真结果 Project Run Project Run Run Truck Fuzzy Truck Backe Fuzzy Truck Backe Project Bun Truck Run Restart Truck Run Truck Fuzzy Truck Back Restart Truck Truck Ya! Situation Situation Best台rt Truck Truck Ya Truck Ya! Situation X=20 x=30 X=30 y=20 y=10 y=40 Φ=30 Φ=220 Φ=-10 Iteration=33 Iteration=52 Iteration=68 Speed=3 Speed=2 Speed=1 ccc 西安电子科技大学电子工程学院 School of Electronte Engineering 11111
x=20 y=20 Φ=30 Iteration=33 Speed=3 x=30 y=10 Φ=220 Iteration=52 Speed=2 x=30 y=40 Φ=-10 Iteration=68 Speed=1 Kosto 系 统 仿 真 结 果
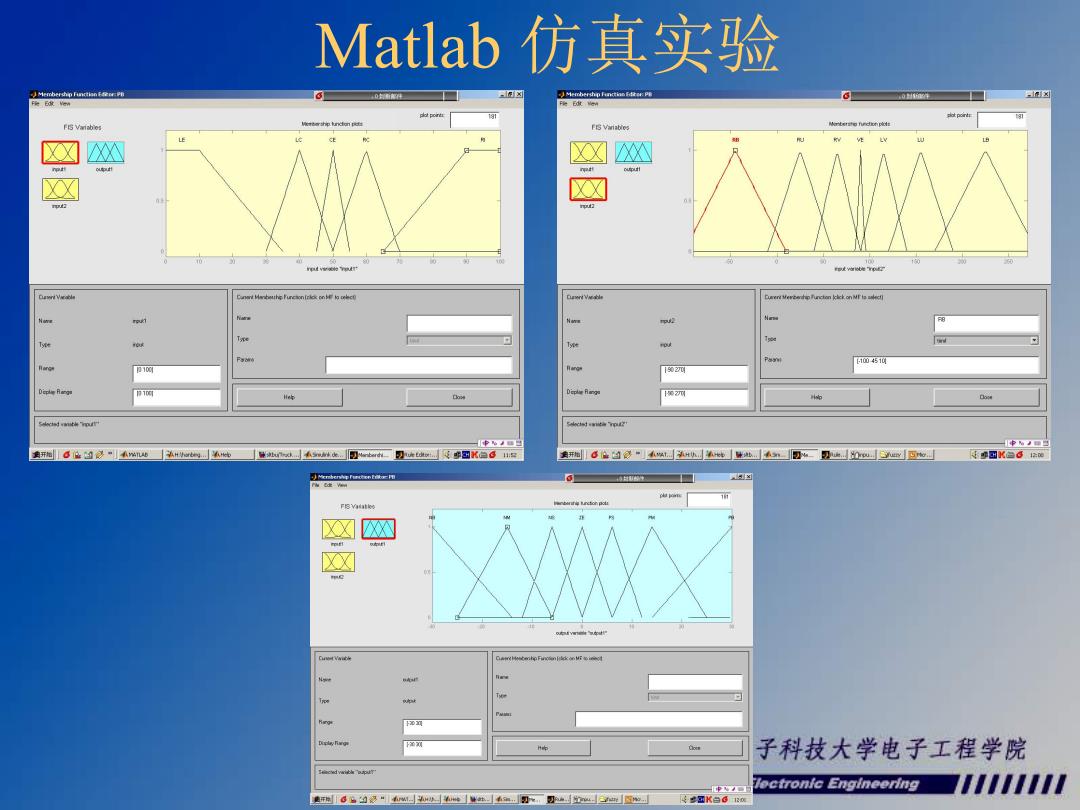
Matlab仿真实验 ☒ Memberdhp Fun量gp ☒ esp如 FS Variabies Merterato fdcnplct: LE CE ☒☒A ☒☒XN ☒ ☒ et地e N -1004510 u10 102元 Diepl Rlange #unA4nkth出☒K台gg 四K台0培 ☒ ☒ 02 子科技大学电子工程学院 -E电2▣ lectronfc Engineering 1111111 类开6s浸44心4m刀h52时圆
Matlab 仿真实验