
(29) 电容式角位移传感器的测量范为01至几十度,分辨率约为0.1”,零位稳定性可达 角秒级。这种传感器结构简单,体积小,重量轻,功耗低,灵敏度高,它不受电磁场干扰, 也不产生干扰磁场。因此,该传感器广泛应用于精密测角,如用于高精密陀螺和摆式加速 度计。 2.2.4编码盘式角位移传感器 境码盘式角位移传感暴是一种检测轴角位移的直接方法,分绝式和脉神式两种。绝对 式编码盘需要一个计数系统,旋转的码盘通过元件给出一系列脉冲,在计数器巾对某个基数 进行加或减,从而记录旋转的角位移量。脉冲编码盘不需要基数,它能在任意位置给出一个 与位置相应的固定数字码。 (1)绝对式编码器 绝对式编码器的工作原理如图212所示。图中码盘上刻有4条码道,代表4位二进 数码的16种连续取偵,即2种取值。处于测周的码道代表最低位,在连续取值时,每1次 取值都要发生改变,因此颜色变化最频繁,等于16次;离因心最近的码道代表最高位,每 8次取值才发生改变,因此颜色变化最缓慢,等于2次;类似地,代表次高位和次低位的码 道上颜色分别政变4和2次。这种编码方式直接取一进制系进过程,被称作8421码。在 码盘各码道上的黑色部分用来表示高电平“1”,实用时将这部分挖掉,或透明处理,让光源 透射过去,以便通过接受元件转换为电脉冲白色部分表示低电平“0”,实用中这部分做遮 光处理,以便使接受元件转换为低电平脉冲。在AO线上,为每个数码道设置一个光源】 如发光二极管。编码盘的转轴O可直接待测物的转轴。待测定的角位移可由各个码道上的 二进制数表示,如OB直线上:的二进制数宵为“1110”。但在直线OA位置上时,二进制数 处于最大值和最小值相交界位置,可能由各种不精确因素而导致出现读数失误,例如将 “0000”误读作“1111”,或其他任何值,这其实也是8421码盘的一个缺点。这种现象称作 非单值误差,应在码盘设计中,通过编码技术,例如采用循环码(格声码)编码制码盘 (图213)可将错码局限在只有一位上,和改进扫描方法加以解决。表21给出了4位二进 制码与循环码之间的对照关系。 一光敏器件 图2124位绝对式编码器的工作原理 图2134位循环码码盘的示意 使用图214的并行译码电路,可将循环码译为普通二进制码,此图以4位为例。图中 循环码最高位接G,其余依次接(2、G、G,输出端马为普通二进制的最高位,b~B
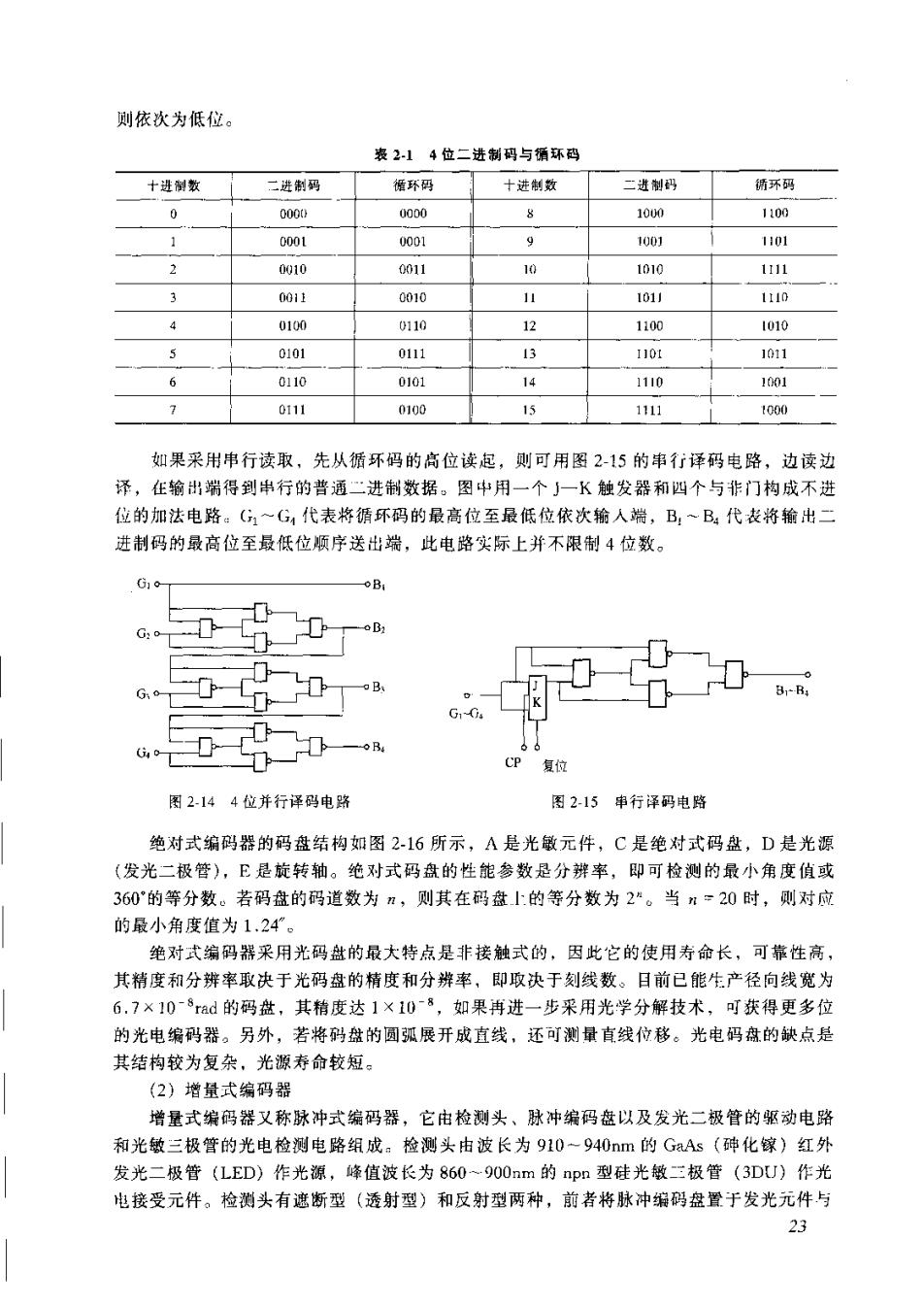
则依次为低位。 表2-14位二进制码与循环码 十进刚数 二进码 循环码 十进制数 桶环码 00¥ 0000 1000 1100 001 0001 10 101 00n0 0011 10 1010 111L 3 0011 0010 1011 0100 0110 12 1100 1010 5 0101 0111 13 II01 1011 0110 0101 14 1110 1001 1 0111 0100 15 1111 1000 如果采用串行凌取,先从循环码的高位读起,则可用图215的串行译码电路,边读边 译,在输出端得到串行的普通二进制数据。图中用一个」一K触发器和四个与非门构成不进 位的加法电路。(G1~G,代表将循环码的最高位至最低位依次输入端,B,一B:代表将输出二 进制码的最高位至最低位烦序送出端,此电路实际上并不限制4位数。 G: B 0 00 Gr-G. CP复位 图2-144位并行译码电路 图215申行译码电路 绝对式编码器的码盘结构如图2-16所示,A是光敏元件,C是绝对式码盘,D是光源 (发光二极管),E是旋转轴。绝对式码盘的性能参数是分辨率,即可检测的最小角度偵或 360°的等分数。若码盘的码道数为”,则其在码盘.上的等分数为2“。当”=20时,则对应 的最小角度值为1.24 绝对式编码器采用光码盘的最大特点是非接触式的,因此它的使用寿命长,可靠性高 其精度和分辨率取决于光码舟的精度和分辨率,即取决于刻线数、目前已能牛产径向线宽为 6.7×108ra的码盘,其精度达1×10-,如果再进一步采用光学分解技术,可获得更多位 的光电编码器。另外,若将码猛的圆弧展开成直线,还可测量直线位移。光电码盘的缺点是 其结构较为复杂,光源寿命较短。 (2)增量式编码器 增量式编码器又称脉冲式编码器,它由检测头、脉冲编码盘以及发光二极管的驱动电路 和光敏三极管的光电检测电路细成。检测头由波长为910一940nm的GaAs(砷化嫁)红外 发光二极管(LED)作光源,峰值波长为860~900nm的pm型硅光敏三极管(3DU)作光 电接受元件。检测头有遮断型(透射型)和反射型两种,前着将脉冲编码盘骨于发光元件与 23

受光元件之间,当码盘转动时,检测光路时通时断,形成光电联冲;后者将发光元件与受光 元件均置于码盘的一侧,利用码盘本身反射或外加反射板反射,检测出光电脉冲。前者结构 简单,检出信号强,故常被采用。 以 光栏片入 光栏片 图2-16绝对式码盘的结构示意 图2-17脉冲编码盘的结构 脉冲码盘安装在编码器的转轴上,并置于发光元件和受光元件之间。当转轴旋转时,受 光元件检测出刻有齿槽的编码盘的角位移,可得到两组相位相差9'的脉冲信号,经放大整 形后,脉冲编码器输出两路方波信号。利用这两路方波信号可辨向,实现可逆计数。亦可通 过外路倍锁,从而得到2倍频或4倍赞信号。 脉冲编码盘是一个刻有齿槽的金属薄圆盘,如217,图中R1=27.5mm,R2 20mm,码盘齿数x=36,齿间距对应的角度为0=5”,两个光栏片的间距S=12.87mm,对 应角为37.5°。左边光栏中的孔与右边光栏中的孔在相位上指开14节距,从而使两组发光 元件和受光元件检出相位相差90°的信号,以辨方向。距离5对应的角度可按式(210】 设计: =(2nx12)8 (2-10) 式中n一一根据码齿数多少而适当设定的整数,齿数多时,n可取值大些,如在图217 中取n=4,0=5°,则=37.5°。 这种编码器是非接触式的,有寿命长、功耗低和耐振动等特点,故广泛成用于角度、距 离、位置、转速等的检测与控制。 2.3转速传感器 2,3,1直流测速发电机 直流测速发电机(见图2-18)的.工作原理类似于发电机,二者都是将转速的机械能转 换成电信号输出。当直流测速发电机空载工作时,其输出电压U。与角速度w成正比,而极 性则由旋转方向确定。 当直流测速发电机有负载时,电枢的旋转线剧便会产生电流,破坏了输出电压与转 速的线性度,使发电机的出特性产生误差。因此,为保证直流测速发电机的测速精 度,应尽可能使测速发电机在低负载下工作,即工作在转速变化范围小而负载电阻较大的 场合。 24
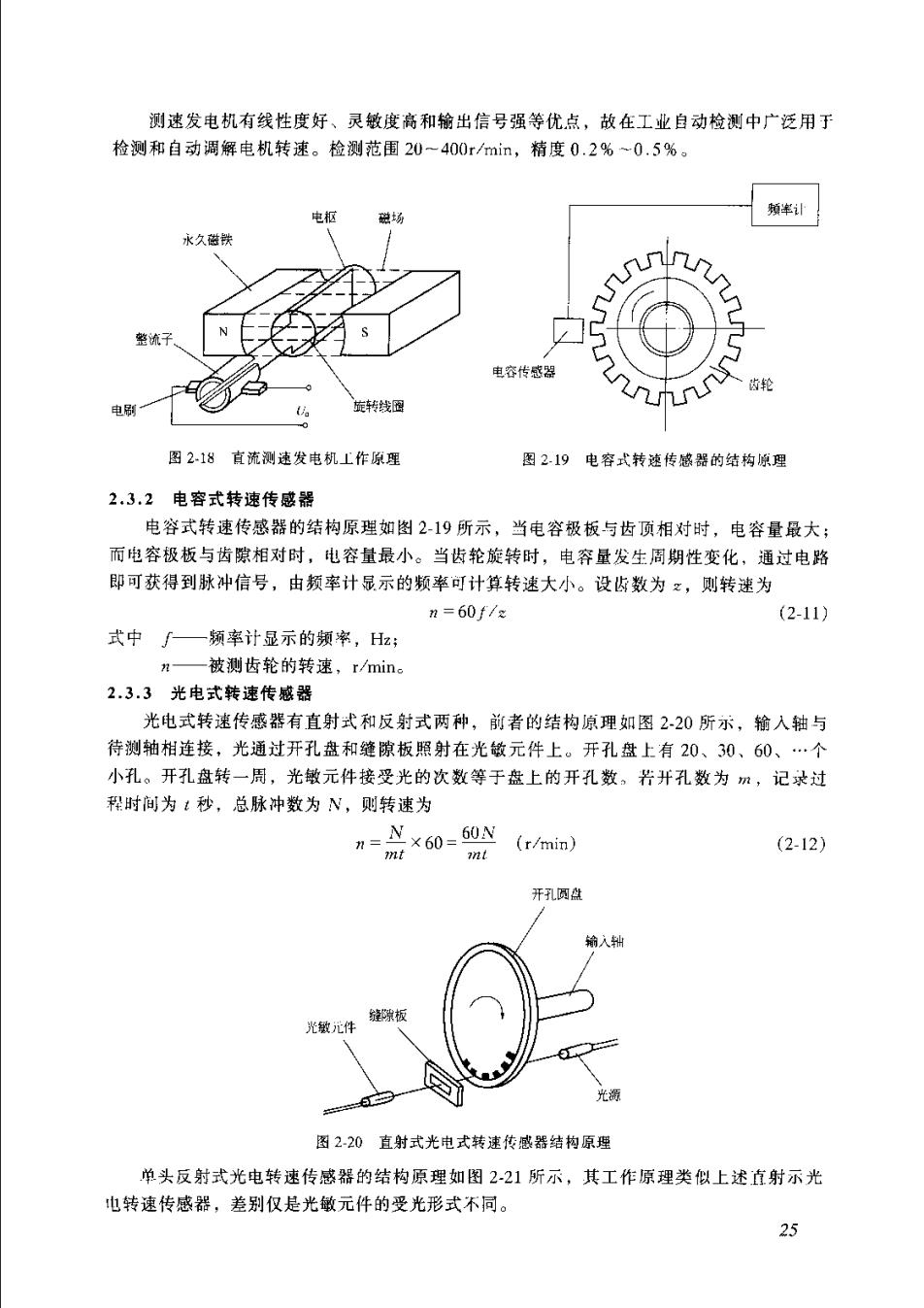
测速发电机有线性度好、灵敏度高和输出信号强等优.点,故在工业自动检测中广泛用于 检测和自动调解电机转速。检测范围20-400r/min,精度0.2%~0.5% 容 齿轮 电刷 图2-18直流测速发电机上作原理 图219电容式转速传感器的结构原理 2.3,2电容式转速传感器 电容式转速传感器的结构原理如图219所示,当电容极板与齿顶相对时,电容量最大: 而电容极板与齿隙相对时,电容量最小。当齿轮旋转时,电容量发生周期性变化,通过电路 即可获得到脉冲信号,由频率计显示的频率可计算转速大小。设齿数为,则转速为 n=60f/z (2-11) 式中一频率计显示的领,Hz: n一被测齿轮的转速,r/min。 2.3.3光电式转速传越器 光电式转速传感器有直射式和反射式两种,前者的结构原理如图220所示,输入轴与 待测轴相连接,光通过开孔盘和缝隙板照射在光敏元件上。开孔盘上有20、30、60、 .个 小孔。开孔盘转一周,光敏元件接受光的次数等于盘上的开孔数。若开孔数为n,记录过 程时间为t秒,总脉冲数为N,则转速为 n=点×0= (r/min) (2-12) 开孔圆 图220直射式光电式转速传感器结构原理 单头反射式光电转速传感器的结构原理如图2-21所示,其工作原理类似上述直射示光 也转速传感器,差别仅是光敏元件的受光形式不同。 25
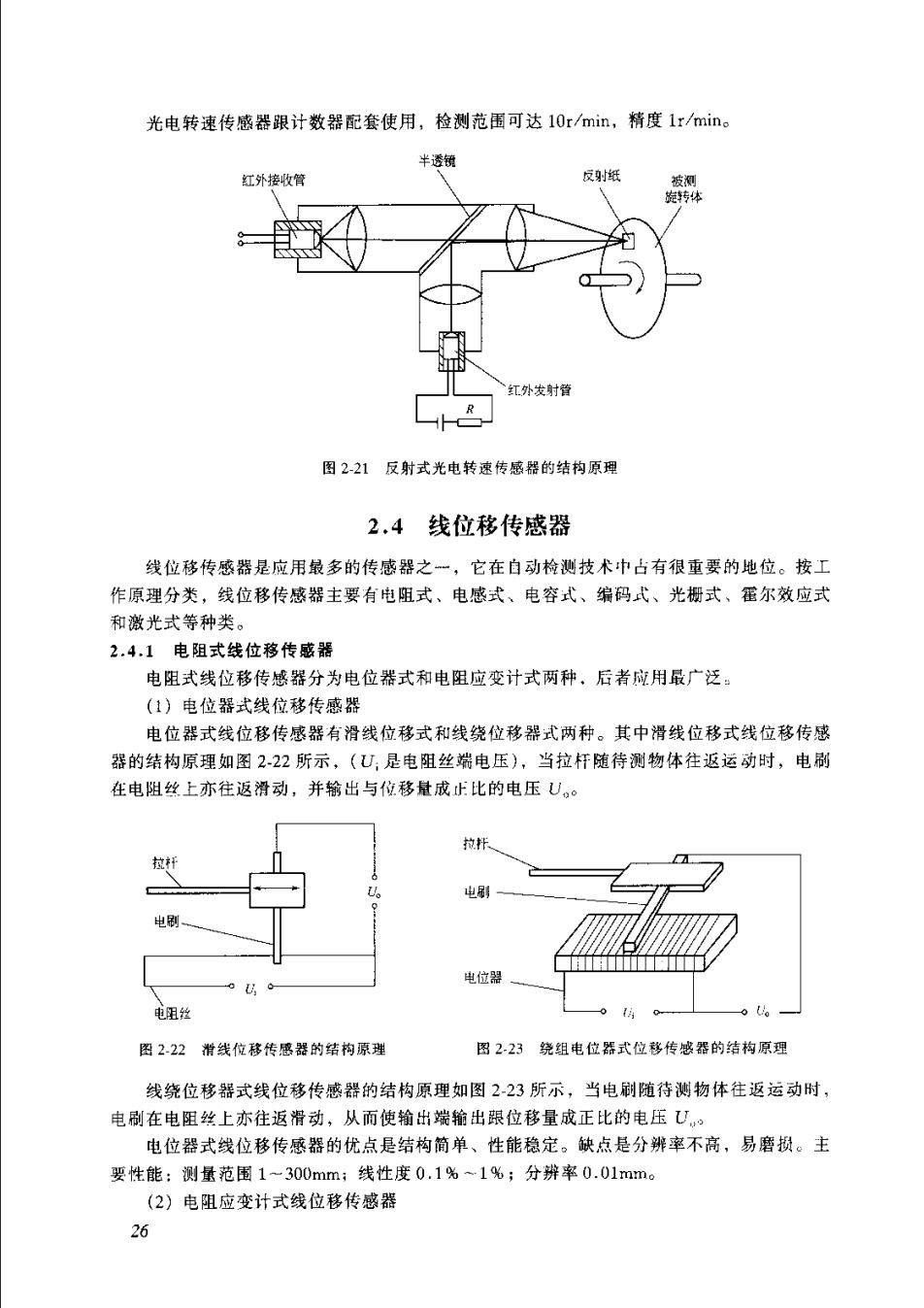
光电转速传感器跟计数器配套使用,检测范围可达l0r/min,精度1r/min。 半透领 红外收管 红外发射首 图2-21反射式光电转速传感器的结构原理 2.4线位移传感器 线位移传感器是应用最多的传感器之一,它在自动检测技术中占有很重要的地位。按工 作原理分类,线位移传感器主要有电阻式、电感式、电容式、编码式、光栅式、尔效应式 和激光式等种类。 2.4.1电阻式线位移传感器 电阻式线位移传感器分为电位器式和电阻应变计式两种,后者应用最广泛: (1)电位器式线位移传感器 电位器式线位移传感器有滑线位移式和线绕位移器式两种。其中滑线位移式线位移传感 器的结构原理如图222所示,(U:是电阻丝端电压),当拉杆随待测物体往返运动时,电刷 在电阻丝上亦往返滑动,并输出与位移盘成止比的电压U。 拉托 电位器 屯阻丝 图222带线位移传感器的结构原 图223绕组电位器式位移传感器的结构原理 线绕位移器式线位移传感器的结构原理如图223所示,当电刷随待测物体往返运动时 电刷在电阻丝上亦往返滑动,从而使输出端输出跟位移量成正比的电压U。 电位器式线位移传感器的优点是结构筒单、性能稳定。缺点是分辨率不高,易磨损。主 要性能:测量范围1一300mm;线性度0.1%-1%;分辨率0.01mm。 (2)电阻应变计式线位移传感器