
阻、电感或电容等参数变化,则需通过基本转换电路将其转换为电量(电压、电流、电荷 等)。如传感器的输出已是电量,则不需要基本转换电路。 为提高输出信号抗干扰能力,常采用对信号进行“调制”的方法。信号的调制可在传感 器或基本电路中进行,也可在转换成电量后进行。经放大再经过解调器使信号恢复原有形 式,通过滤波器选取代表被测量的有效信号。不进行调制时,则不需要解调,也不箭要振荡 器提供调制载波信号。 为了适应不同测量范围,可以引人量程切换电路。为了将被测量进行数字显示,或接入 计算机处理,常采用数字转换电路,也可以不经过数字转换,由被测信号直接驱动显示 机构 (2)增量码数字式传感器检测系统 光番、 磁、容棚、感应同步器等传感器输出增量码信号。其检测系统的典型组成如 图23所示 一传藤器一放大器一→整形器一细分电路一一酥冲当章转换电宽-一记数器 一寄仔器一换电图一什算机一显示执行两 一养向电路 今存器 图23增量码数字式传感器检测系统 传感器的输出经放大、整形后形成数字脉冲信号。为了提高仪器分辨率,常常采用细分 的方法,使传感器的输出变化1周期时计一个数,称为细分数。细分电路还常同时完 成整形作用。在许多情况下,例如激光干涉测长,工作台每移过半波长A2,信号变化一个 周期。入为一个不读出的量。为便于读出,需要进行脉冲当量变换。辨向电路用于辨别工作 台运动方向,以正确进行加法或减法计数。需罢采样时,手动或由指令传越器发出瞄准采样 信号,将所计数值送入锁存器,直接或经计算机计算后,驱动显示执行机构动作 2.1.3传感器在光机电一体化系统中的作用 一个较完善的光机电一体化系统,应该包括以下几个基本要素,即机械本体、动力 分、测试传感部分、执行机构、驱动部分、控制及信息处理单元及接口。测试传感部分的功 能是对系统运行中所需的本身和外界环 境的各个参数及状态进行检测,变成可 识信号,传输到信息处理单元 传感与检测装置是系统的感受器官 其关健元件就是传恋器。显然,传感器 的作用正像人的“五官”一样,而系统 传动装置和机被系统划类似人的手足 控制及信息处理单元则类似人的大脑。 图24具有力控微坚动手爪的装配机器人系统小意 传感器是这一系统中不可缺少的关健环 1一力传感器:2一力/力系传感器控制器:3机器人控制台 节,它的功能越强,系统的自动化程度 4一机器人:5一起端秉顺机构:6一微塑动于;7一力/力矩传坡器: 8-气动手爪:9一轴件:10一孔作:11.气源;12一动器 就会越高。如图24是有力控微驱动下 爪的装配机器人系统,机器人系统是典型的机电一体化系统。 17
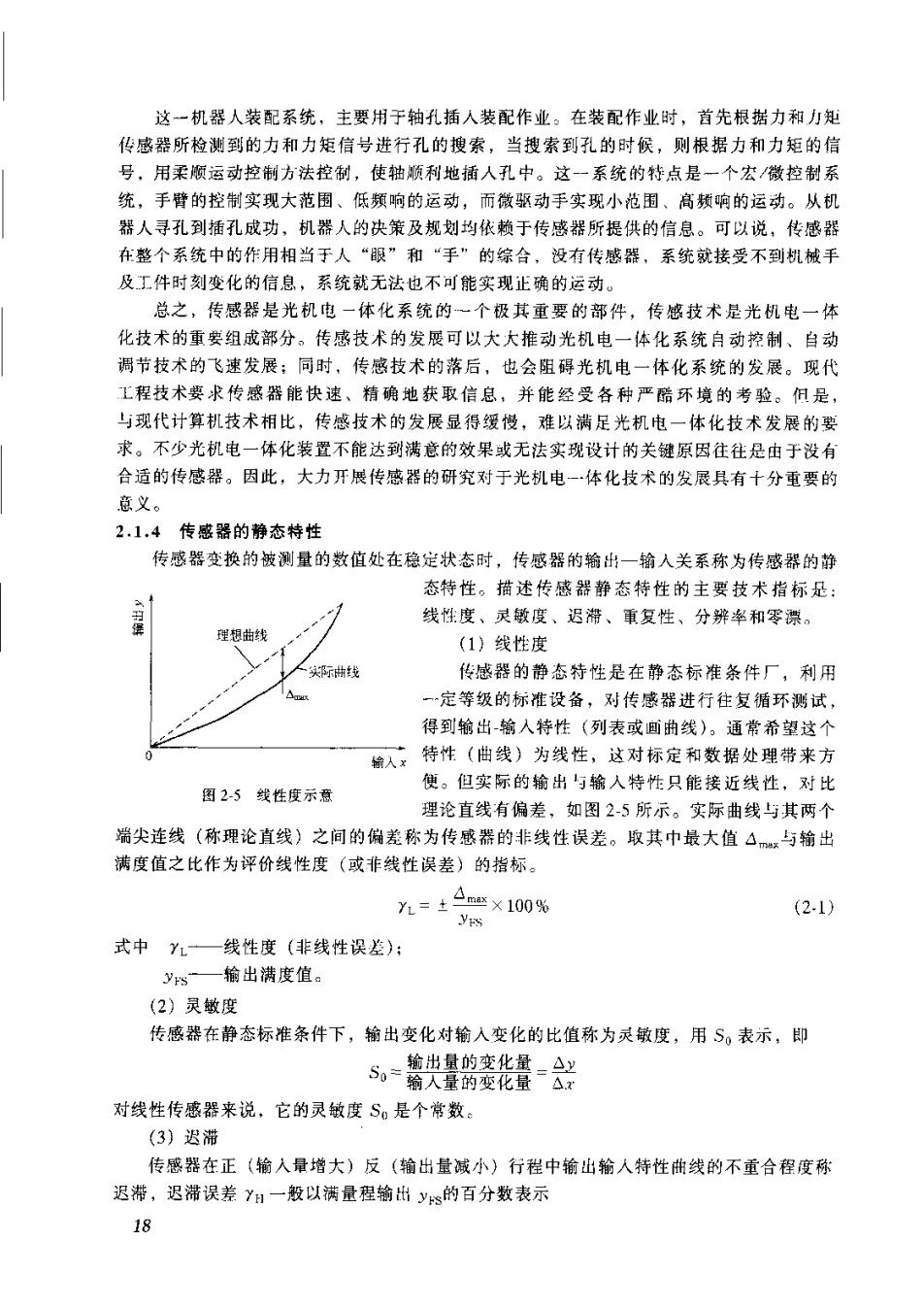
这一机器人装配系统,主要用于轴孔插人装配作业。在装配作业时,首先根据力和力知 传感器所检测到的力和力矩信号进行孔的搜索,当搜索到孔的时候,则根据力和力矩的信 号,用柔顺运动控制方法控制,使轴顺利地插人孔中。这一系统的特点是一个宏/微控制系 统,手臂的控制实现大范围、低须响的运动,而微甄动手实现小范围、高频响的运动。从机 器人寻孔到插孔成功,机器人的决策及规划均依赖于传感器所提供的信息。可以说,传感器 在整个系统中的作用相当于人“眼”和“手”的综合,没有传感器,系统就接受不到机械手 及工件时刻变化的信息,系统就无法也不可能实现正确的运动。 总之,传感器是光机电一体化系统的一个极其重要的部件,传感技术是光机电一体 化技术的重要组成部分。传感技术的发展可以大大推动光机电一体化系统自动控制、自动 调节技术的飞速发展;同时,传感技术的落后,也会阻碍光机电一体化系统的发展。现代 工程技术要求传感器能快速、精确地获取信息,并能经受各种严酷环境的考验。们是 与现代计算机技术相比,传感技术的发展显得缓慢,雅以满足光机电一体化技术发展的要 求。不少光机电一体化装置不能达到满意的效果或无法实现设计的关键原因往往是由于没有 合适的传感器。因此,大力开展传感器的研究对于光机电一·体化技术的发展具有十分重要的 意义。 2,1.4传感器的静态特性 传感器变换的测量的数值处在稳定状态时,传感器的输出一输入关系称为传感器的静 态特性。描述传感器静态特性的主要技术指标是: 引堡 线性度、灵敏度、迟潜、重复性、分辨率和零漂 (1》线性度 传感器的静态特性是在静态标准条件厂,利用 一一定等级的标准设备,对传感器进行往复循环测试, 得到输出输人特性(列表或画曲线),通常希望这个 人:特性(曲线)为线性,这对标定和数据处理带来方 便。但实际的输出与输入特性只能接近线性,对比 图25线性度示意 理论直线有偏差,如图2-5所示。实际曲线与其两个 端尖连线(称理论直线)之间的偏差称为传感器的非线性误差。坂其巾最大值△与输出 满度值之比作为评价线性度(或非线性误差)的指标。 1=±×100% (2-1) 式中Y—线性度(非线性误) Vue 一偷出满度值。 (2)灵敏度 传感器在静态标准条件下,输出变化对输入变化的比值称为灵敏度,用S表示,即 5量的麦化量-合 量的变化量 对线性传感器来说,它的灵敏度S。是个常数: (3)迟滞 传感器在正(输入量增大)反(输出量诚小)行程中输出输人特性曲线的不重合程度称 迟滞,迟滞误差YH一般以满量程输出y的百分数表示 18

(2-2) 式中△H一输出值在正、反行程间的最大差值。 迟滞特性一般出实验方法确定,如图2-6所示 (4)重复性 传感器在同一条件下,被测输入量按同一方向作全量程连续多次重复测量时,所得输出 一输人曲线的不一致程度称为重复性。重复性误差Y用满量程输出的百分数表示,即 ①近似计算 7R △R×100% (2-3) ②精确计算 =±√空兴-品×1m (2-4) 式中△Rm -输出最大重复性误差,图27; 第;次测址值; y 一测量值的算术平均值; 测量次数。 图2-6迟滞特性 阁27重复特性 (5)分辨力 传感器能检测到的最小翰入增量称分辨力,在输人零点附近的分辨力称为阀值。 (6)零漂 传感器在零输人状态下,输出值的变化称零漂,零漂可用相对误差表示,也可用绝对误 差表示。 2.1.5传感器的动态特性 传感器测量静态信号时,由于被测量不随时间变化,测量和记录过程不受时间限制。而 实际中大量的被测量是随时间变化的动态信号,传感器的输出不仅需要精确地显示被测量的 大小,还要显示被测量随时间变换的规律,即拔测量的波形。传感器能测量动态信号的能力 用动态特性表示。动态待性是指传感器测量动态信号时、输出对输人的响应特性 动态特性好的传感器,其输出量随时间的变化规律将再现输入量随时间的变化规律,即 它们具有同一个时间函数。但是,除理想情况外,实际传感器的输出信号与输人信号不会具 19
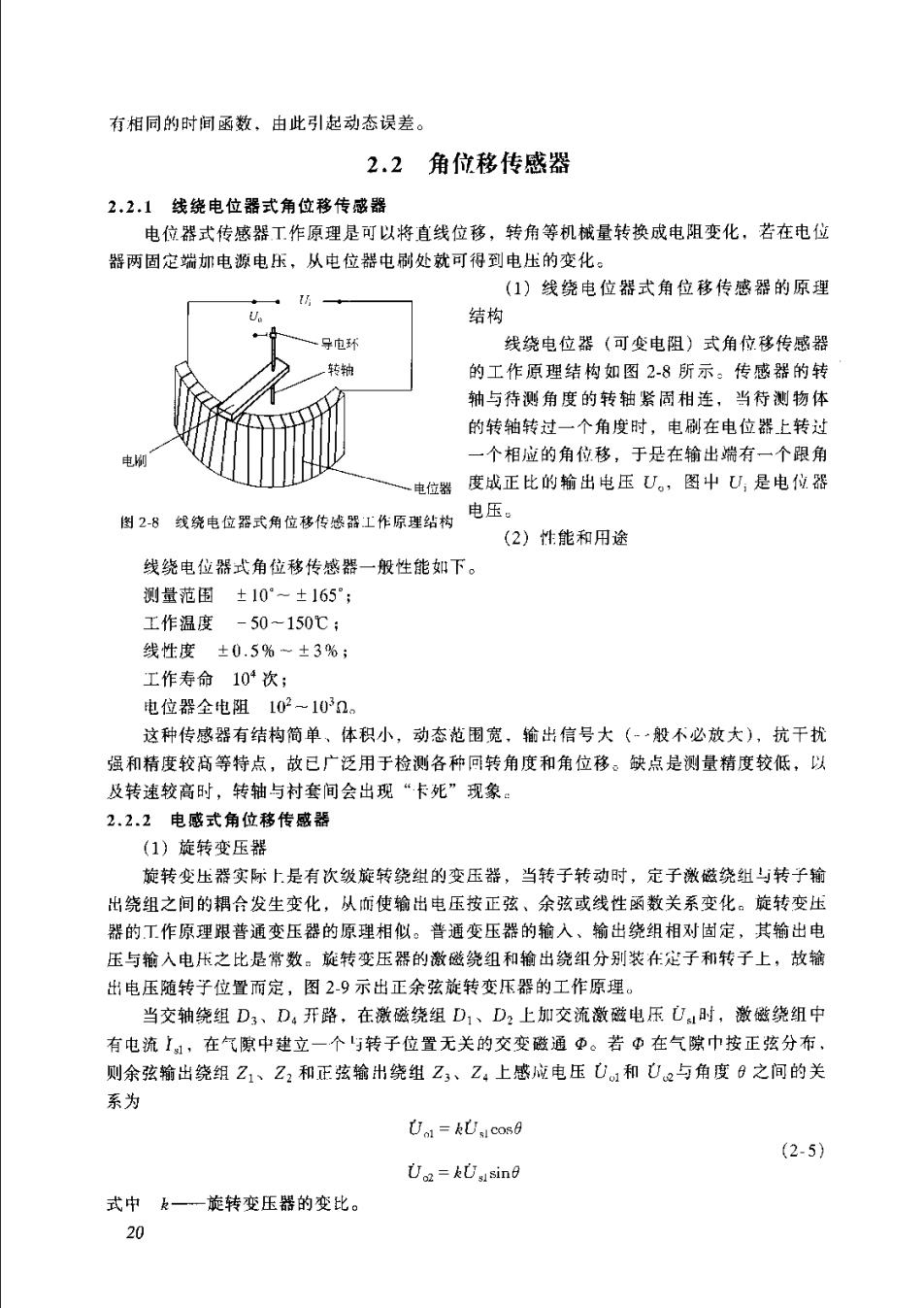
有相同的时间函数,由此引起动态误差。 2.2角位移传感器 22.1线绕电位器式角位移传感器 电位器式传感器工作原理是可以将直线位移,转角等机械量转换成电阻变化,若在电位 器两固定端加电源电压,从电位器屯刷处就可得到电压的变化 (1)线绕电位器式角位移传感器的原理 结构 导巾到 线绕电位器(可变电阻)式角位移传感器 转轨 的工作原理结构如图2-8所示。传感器的转 轴与待测角度的转轴紧周相连,当待测物体 的转轴转过一个角度时,电刷在电位器上转过 一个相应的角位移,于是在输出端有一个跟角 .电位器 度战正比的输出电压U。,图中U,是电位器 图2-8线绕电位器式角位移传憾器工作原理结构 电压。 (2)性能和用途 线绕电位器式角位移传感器一般性能如下。 测量范固±10°~±165; 工作温度-50-150℃: 线性度±0.5%一±3%: 工作寿命104次: 电位器全电阻102一103n。 这种传感器有结构简单、体积小,动态范围宽,输出信号大(·般不必放大),抗干扰 强和精度较高等特点,故已广泛用于检测各种同转角度和角位移。缺点是测量精度较低,以 及转速较高时,转轴与衬套间会出现“卡死”现象。 2.2.2电感式角位移传感器 (1)旋转变压器 旋转出器实际上是有次数锭转绕组的变压器,当转子转动时,定子微磁绕组转子输 出绕组之间的合发生变化,从廊使输出电压按正弦、余弦或线性函数关系变化。旋转变压 器的丁作原理跟喜通变压器的原理相似。普通变压器的输入、翰出绕组相对固定,其输出电 压与输入电压之比是常数。旋转变压器的激磁绕组和输出绕卸分别装在定子和转子上,故输 出电压随转子位置而定,图29示出正余弦放转变压器的工作原理。 当交轴绕组D3、D,开路,在激磁绕组D1、D上加交流藏磁电压U时,激磁绕组中 有电流1,在气隙中建立一个与转子位置无关的交变磁通中。若中在气隙巾按正弦分布, 则余弦输出绕组Z1、Z2和正弦输出绕组Z,、Z:上感应电压0和·®与角度9之间的关 系为 Uo=kUsICORG (2-5) U=kUssin0 式中k一—旋转变压器的变比。 20

石8 图29正余弦英转交压器的工作原理 旋转变压器精度较高,可常性好,能完成各种功能,已广泛应用于自动解算系统、远 离同步传输系统,以及移相器和坐标变换器等。 2.2.3电容式角位移传盛器 电容式传感器是一种能将被刻量的变化转换成 电容量变化的传感器。如图210所示的平板电容 88X】 器,忽略其边缘效应,电容量C为 C= (F) (2-6) 式中e一极板间介质的介电数,e=ene,(e,为 极板间介质的相对介电常数,0为真 空介电常数,E0=8.854×1012℉/m)5 S一极板的遮盖面积,m2; 图210电容传感器工作原理 B一极板的距离,m。 从上式可以看出,当被测值变化时可引起电容传感器的e、S 6中任何一个参数变化,则其电容量将发生变化。电容传惑器可分 为三种类型:变极距型、变西积型和变介质带数型。电容式角位移 传感器属于变面积类型的电容式传感器,其工作原理如图211所 示,当动极板产生角位移时,电容器的工作面积发生变化:通过检 测电路检测出电容量变化,即可确定角度和角位移。 图2-11电容式角位移传 电容式角位移传感器最大电容量C,和电容改变量△C分别为 感器的工作原理 (2-7) △C-C2(P) (2-8) 式中 -弧形极板圆心角,ad: △a -动极板角位移,rad: 极板半径,m。 其他参数意义同式(2-6)。 电容式角位移传感器的静态灵敏度为 21