素面火学 Xinjiang University 电气工程学院运动控制系统 电力拖动自动控制象统 第六章 基于动态模型的 异步电动机调速系统
电力拖动自动控制系统 第六章 基于动态模型的 异步电动机调速系统
亲群大学 电气工程学院运动控制系统 Xinjiang University 基于动态模型的异步电动机调速 依据动态性能 怎样获得 非线性 高动态调 速性能? 异步电动机 分析转矩和 强耦合 磁链控制规律 多变量 研究调速方案 已经获得成熟应用的两种基于动态 模型的高性能交流电动机调速系统: 夫量控制和直接转矩控制
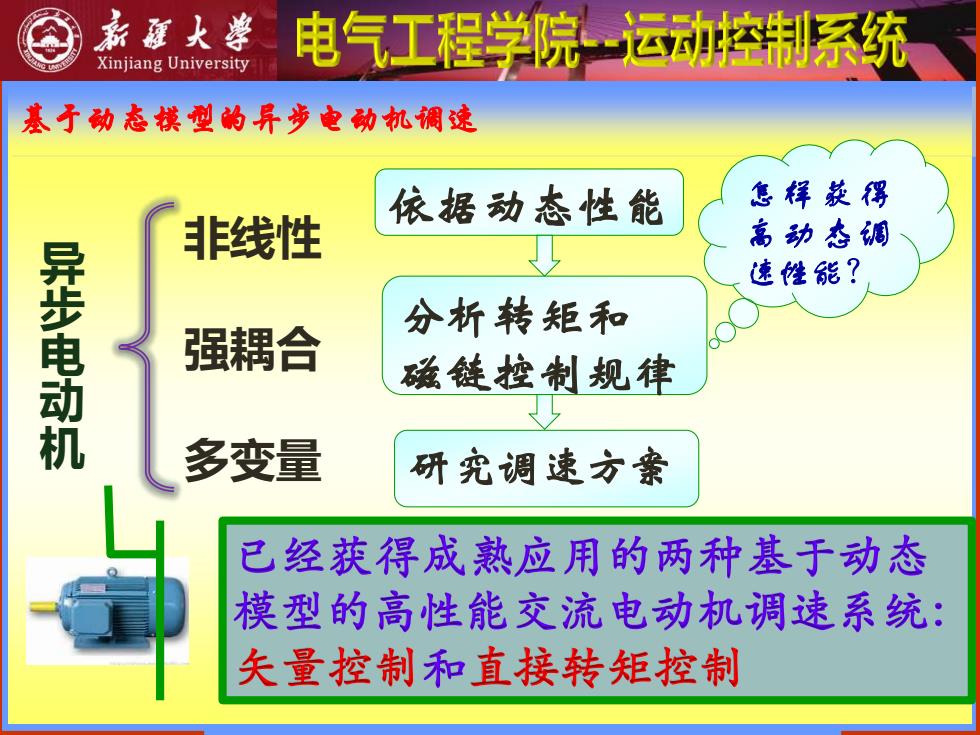
基于动态模型的异步电动机调速 异 步 电 动 机 非线性 强耦合 多变量 怎样获 得 高动态 调 速性能? 依据动态性能 分析转矩和 磁链控制规律 研究调速方案 已经获得成熟应用的两种基于动态 模型的高性能交流电动机调速系统: 矢量控制和直接转矩控制
新原大岸 电气工程学院运动控制系统 Xinjiang University 基子动态模型的异步电动机调速 失 量控制 矢量变换 等效直流 电动机模型 转子磁链 定向 模仿直流 电动机控制
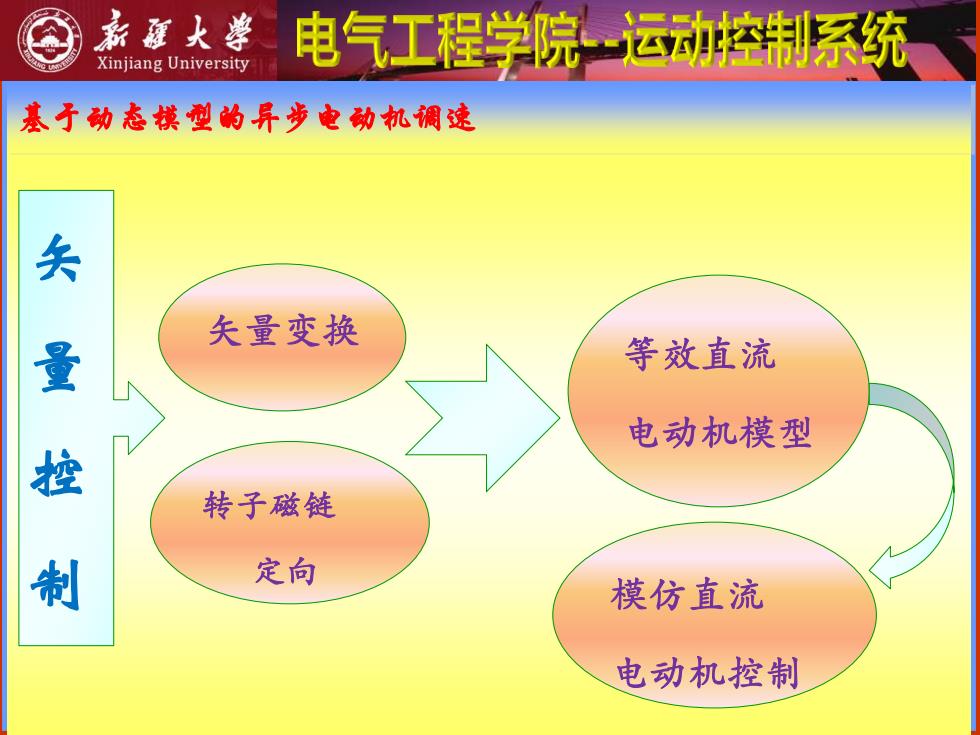
基于动态模型的异步电动机调速 矢量变换 转子磁链 定向 等效直流 电动机模型 模仿直流 电动机控制 矢 量 控 制
嘉红火学 电气工程学院运动控制系统 Xinjiang University 基于动态模型的异步电动机调速 直接转矩控制 转矩偏差 根据当前定 子磁链关量 所在的位置 子电压矢量 选取合适定 定子磁链幅 值偏差 实施控制
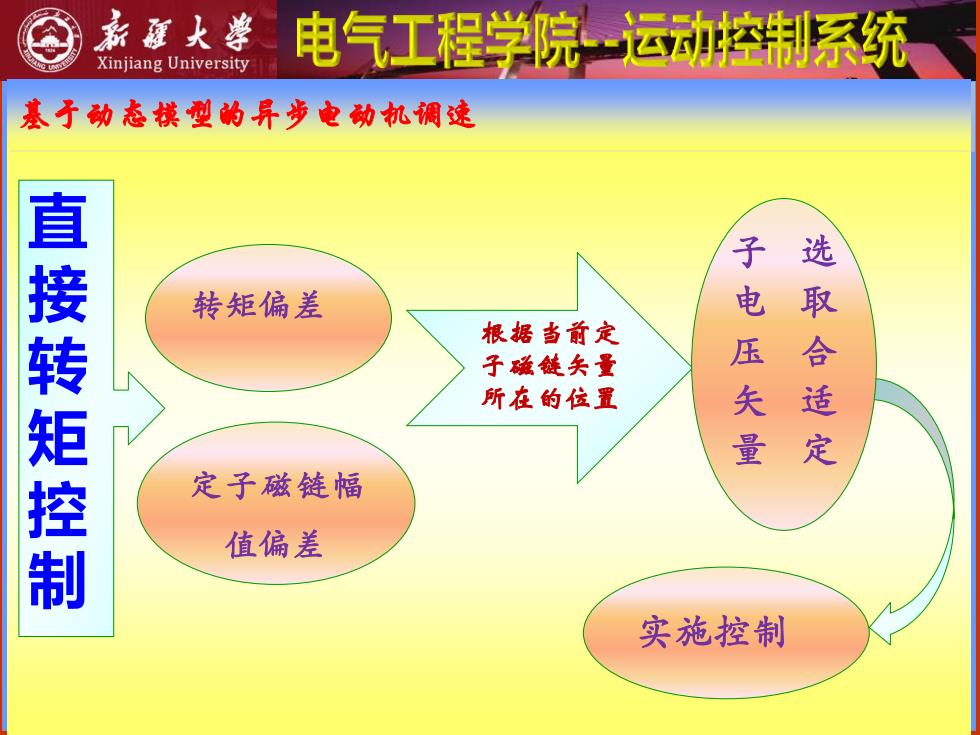
基于动态模型的异步电动机调速 转矩偏差 定子磁链幅 值偏差 根据当前定 子磁链矢量 所在的位置 实施控制 直 接 转 矩 控 制 选 取 合 适 定 子 电 压 矢 量
新藤大岸 电气工程学院运动控制系统 Xinjiang University 异步电动机动态数学模型的性质 异步电动机三相数学模型 √坐标变换 /异步电动机在正交坐标系上的动态数学模型 异步电动机在正交坐标系上的状态方程 异步电动机按转子磁链定向的矢量控制系统 √异步电动机按定子磁链控制的直接转矩控制系统 √直接转矩控制系统与矢量控制系统的比较
内 容 提 要 ✓异步电动机动态数学模型的性质 ✓异步电动机三相数学模型 ✓坐标变换 ✓异步电动机在正交坐标系上的动态数学模型 ✓异步电动机在正交坐标系上的状态方程 ✓异步电动机按转子磁链定向的矢量控制系统 ✓异步电动机按定子磁链控制的直接转矩控制系统 ✓直接转矩控制系统与矢量控制系统的比较