新惠火学 电气工程学院一运动控制系统 Xinjiang University 电力拖动自动控制象统 第四章 可逆控制和弱磁控制的直流 调速系统
电力拖动自动控制系统 第四章 可逆控制和弱磁控制的直流 调速系统
亲题火学 Xinjiang University 电气工程学院-运动控制系统 内容提要 直流PWM可逆直流调速系统 V-M可逆直流调速系统 弱磁控制的直流调速系统
内 容 提 要 直流PWM可逆直流调速系统 V-M可逆直流调速系统 弱磁控制的直流调速系统
新惠火学 电气工程学院一运动控制系统 Xinjiang University 可逆调速系统 正转 正转 制动状态 电动状态 右图是转速和电磁转矩坐 标系的四象限运行 e +Te 反转 反转 电动机产生电动转矩与 电动状态 制动状态 制动转矩 而 N 实现机械快速的减速、停 车写正发向运行功能
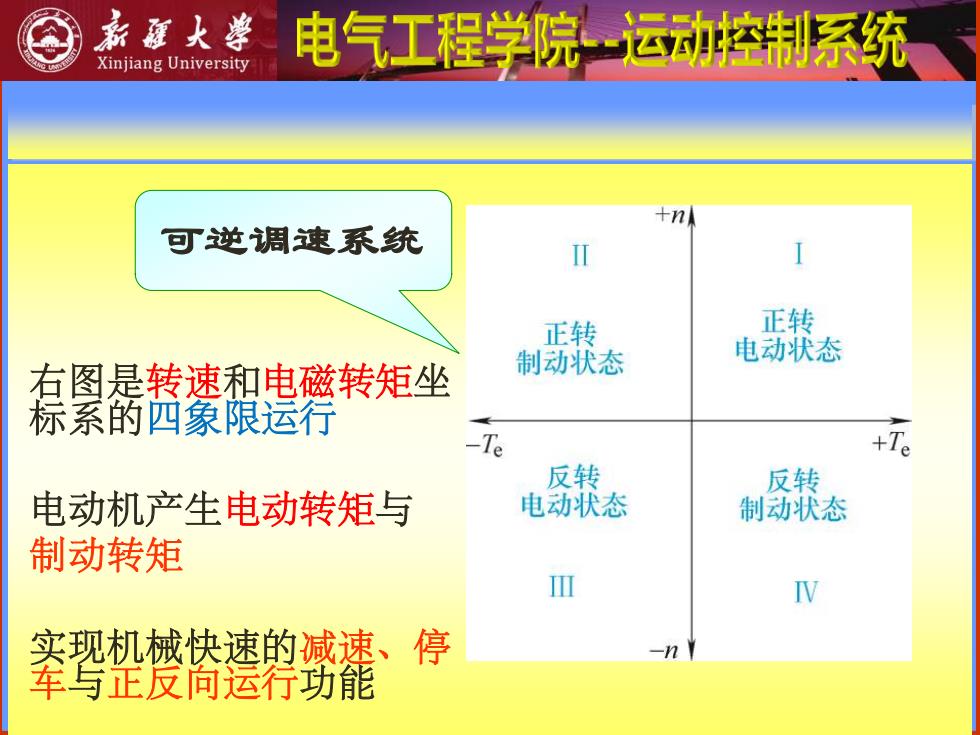
右图是转速和电磁转矩坐 标系的四象限运行 电动机产生电动转矩与 制动转矩 实现机械快速的减速、停 车与正反向运行功能 可逆调速系统
嘉蕴火学 电气工程学院~运动控制系统 Xinjiang University 4.1直流PWM可遂调速系统 PWM变换器电路形式 不可逆 可逆 不可逆PWM-直 流电动机系统 可逆PWM变换器 直流电动机系统 因为平均电压 对比 始终大于零 步 改变PWM变换器 故不可逆 输出电压正负极性 转速不能反向 即可使转速反向
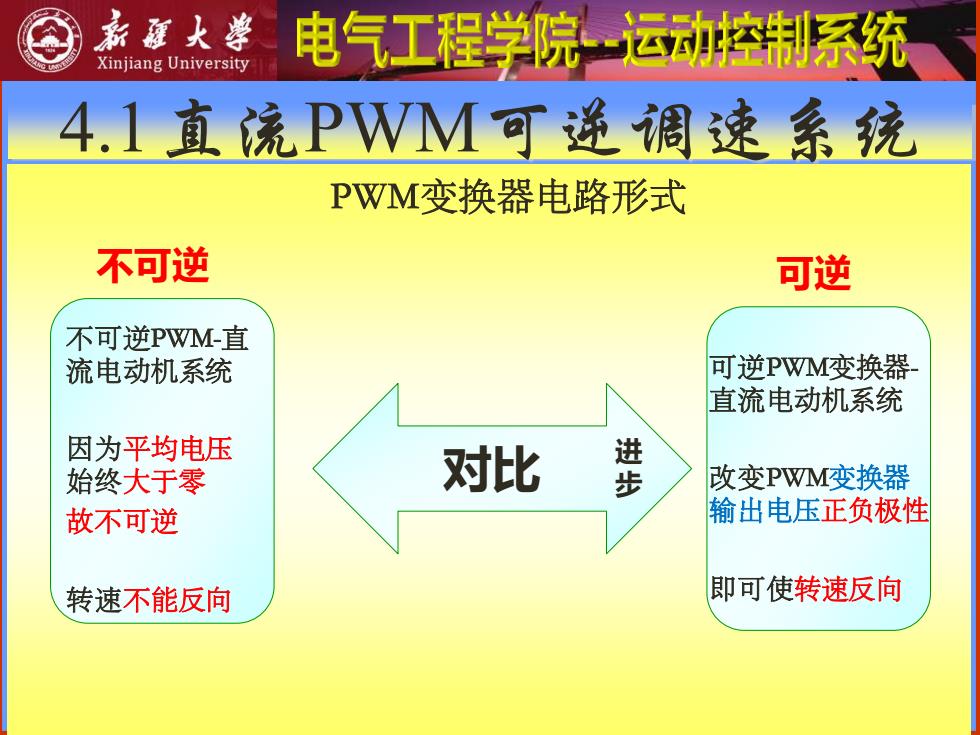
4.1直流PWM可逆调速系统 不可逆 不可逆PWM-直 流电动机系统 因为平均电压 始终大于零 故不可逆 转速不能反向 PWM变换器电路形式 可逆 可逆PWM变换器- 直流电动机系统 改变PWM变换器 输出电压正负极性 即可使转速反向 对比 进 步
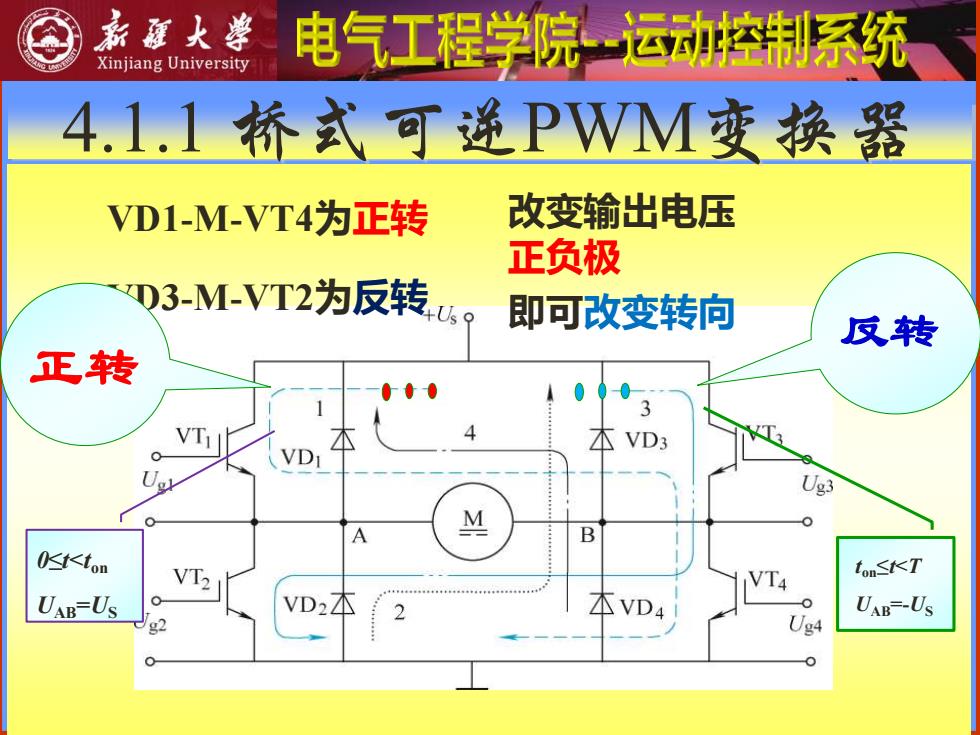
新庭火学 电气工程学院运动控制系统 Xinjiang University 4.1.1桥式可逆PWM变换器 VD1-M-VT4为正转 改变输出电压 正负极 D3-M-VT2为反转s9 即可改变转向 反转 正转 VD3 VD M A 0<t<ton VT2 VT4 ton≤KT UAB-US 不VD4 0 UAB-Us UgA
4.1.1 桥式可逆PWM变换器 VD1-M-VT4为正转 VD3-M-VT2为反转 正转 反转 0≤t<ton UAB=US ton≤t<T UAB=-US 改变输出电压 正负极 即可改变转向