
机械与动力工程学院 School of Mechanical Engineering,Shanghal Jlao Tong University “设计与制造川”课程 (D&M I1,ME209) 第二章机构自由度与常用机构简介 设计与制造二 郭为忠 博士教授 机械与动力工程学院 上海交通大学
“设计与制造II”课程 (D&M II,ME209) 设 第 章二 机构自由度与常用机构简介 计 与 制 造 II郭为忠 博士 教授 机械与动力工程学院 上海交通大学
目录 第二章 机构的组成与机构运动简图kinematic diagram 机构自由度dof计算(KGC公式) 机构自由度与常用机构 常用机构 习题 Kutzbach-Grubler-Chebyshev formula
目 录 第 二章 机构的组成与机构运动简图kinematic diagram 机 构 机构自由度dof计算(KGC公式) 常用机构 构 自 由 度与 习题 常用 机 构 Kutzbach-Grubler-Chebyshev formula
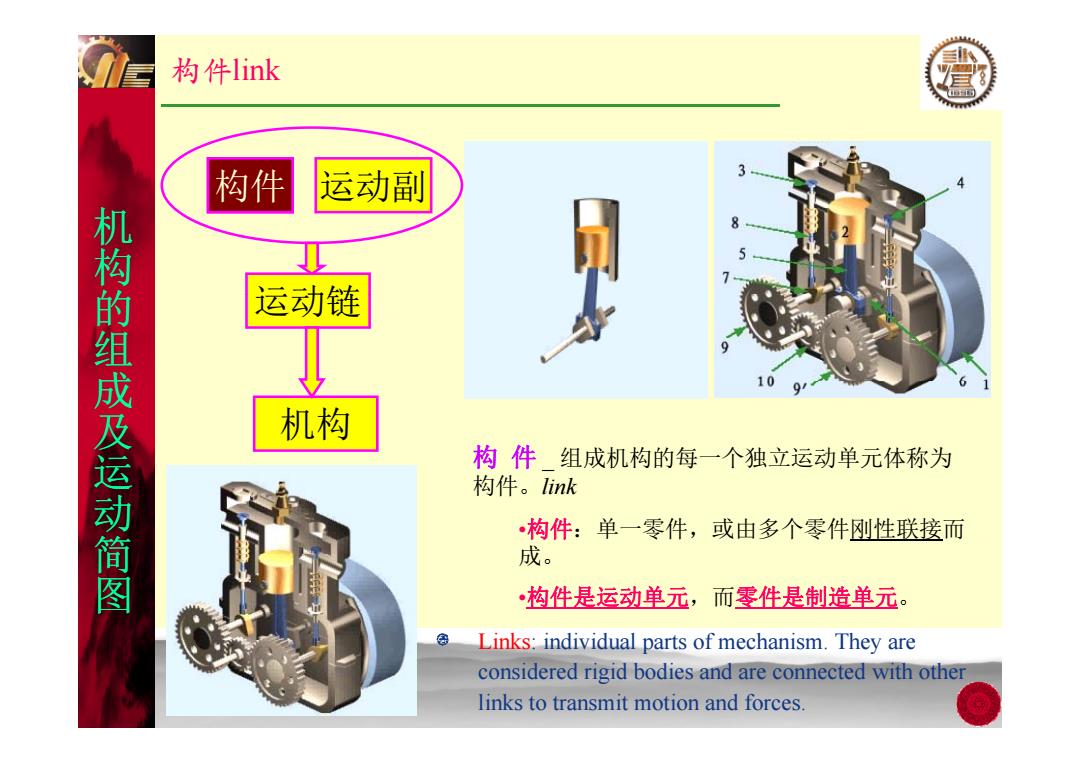
构件ink 构件 运动副 机构的组成及运动简图 运动链 10 机构 构件组成机构的每一个独立运动单元体称为 构件。link •构件:单一零件,或由多个零件刚性联接而 成。 ·构件是运动单元,而零件是制造单元。 Links:individual parts of mechanism.They are considered rigid bodies and are connected with other links to transmit motion and forces
构件link 机 构件 运动副 构 的 机 组 运动链 成 的 运动链 构 件 组成机构的每 一个独立运动单元体称为 成 及 运 成 机构 构 件 _ 成机构的每 个独 动单元体称为 构件。link •构件:单一零件,或由多个零件刚性联接 而 成 运 动 简 运 成。 •构件是运动单元,而零件是制造单元。 简 图 Links: individual parts of mechanism They are : individual parts of mechanism. They are considered rigid bodies and are connected with other links to transmit motion and forces
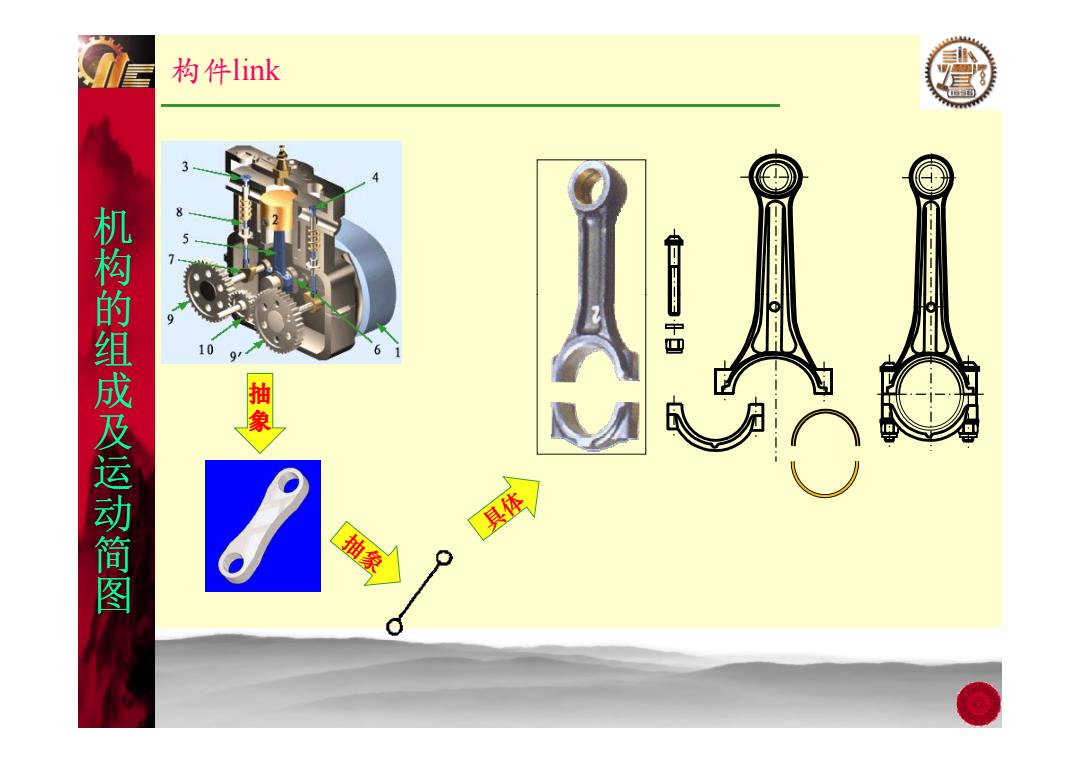
构件link 机构的组成及运动简图 10 象 具体 抽象
构件link 机 构 的 机 组 成 的 及 运 成 抽 象 动 简 运 图
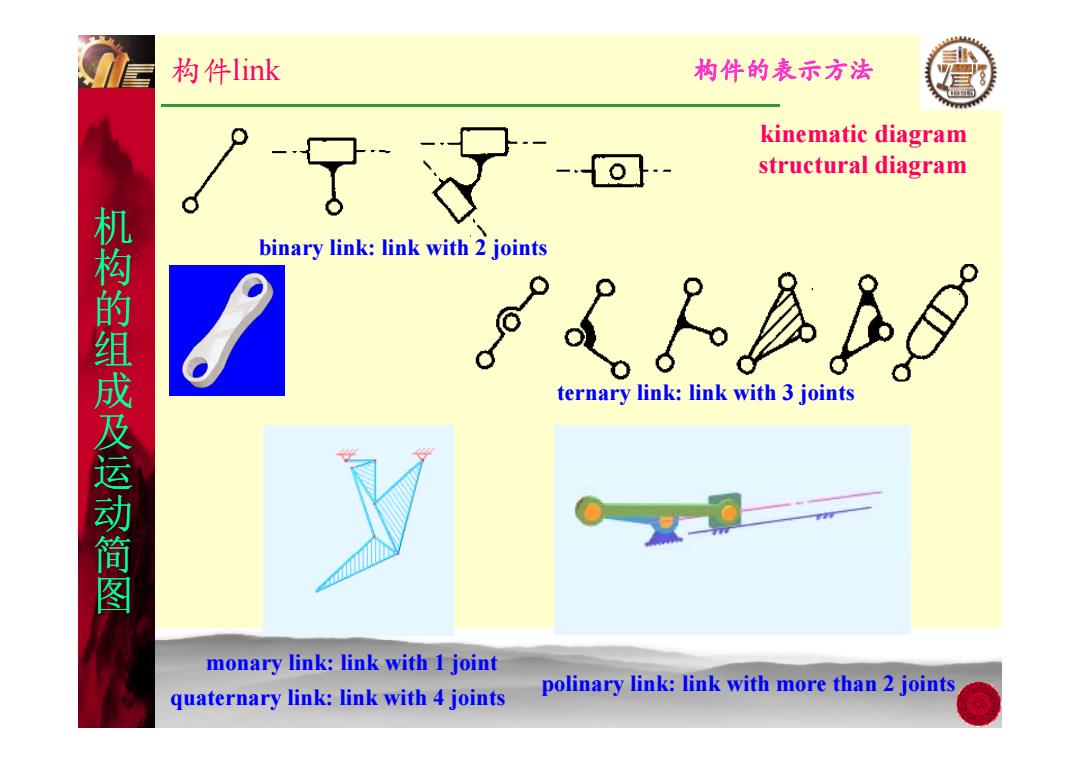
构件link 构件的表示方法 /了 kinematic diagram structural diagram binary link:link with 2 joints 机构的组成及运动简图 人BS ternary link:link with 3 joints monary link:link with 1 joint quaternary link:link with 4 joints polinary link:link with more than 2 joints
构件link 构件的表示方法 机 kinematic diagram structural diagram 机 构 的 机 binary link: link with 2 joints 组 成 的 及 运 成 ternary link: link with 3 joints 动 简 运 图 monary link: link with 1 joint quaternary link: link with 4 joints polinary link: link with more than 2 joints