
机械与动力工程学院 School of Mechanical Engineering,Shanghal Jlao Tong University “设计与制造川”课程 (D&M I1,ME209) 第8章电控系统&传感器 设计与制造二 选型设计 郭为忠博士教授 机械与动力工程学院 上海交通大学
“设计与制造II”课程 (D&M II,ME209) 第8章 电控系统 & 传感器 选型设计 设 计 与 制 造 II郭为忠 博士 教授 机械与动力工程学院 上海交通大学

目录 一、电控系统 传感与电控系统选型设计 二、传感器
目 录 传 感 一、电控系统 与 电 控系 二、传感器 统 选 型 设计

机电产品结构方案开发过程(产品详细设计) 输出端执行瑞动作 机构/传动运动 输入端驱动端动力 艺 工艺 工艺 机械 尺度 机械 控制 动作 运动 运动 驱动 控制 时序 项目设计与制作指导 序列 时序 循环 端运 设计 动循 图 任 时序逻辑控制 环图 功能要求 思 求解 图 优化 义 工艺动作序列 素 机城运动方案示意图 机城运动方案简图 广 驱动 机构 动态过程控制 构型 设计 尺度 方案 控制设计旧务书 机械运动方案设计过程 (Project实施子流程) 机械设计师/往导+电控设计师/配合
机电产品结构方案开发过程(产品详细设计) 输出端/执行端动作 机构/传动运动 输入端/驱动端动力 时 序 逻 项 驱动 辑 控 制 目设 计 端运 动循 环图 动 态 计 与 制 过 程 控 作指 导 制 机械运动方案设计过程(Project实施子流程) 机械设计师/主导+电控设计师 /配合

机电产品结构方案开发过程(产品详细设计) 控制系统设计 2条并行主线 控制系统简图的硬件设计/实现 项目设计与制作指导 时序逻辑控制 控制 控制 控制 控制 控制 时序 软硬 图 硬件 软硬 架构 件系 计 选型 动态过程控制 控制 控制 控制 控制 控制 设计任务 动态 软件 算法 控制 控制软便件方案 算法 软件 模型 开发 实现 控制款硬件系统 程序 书 控制系统简图的算法设计/软件实现
机电产品结构方案开发过程(产品详细设计) 控制系统设计 2条并行主线 控制 控制 项 控制系统简图的硬件设计/实现 2条并行主线 时 控制 硬件 架构 控制 软硬 件系 控制 软硬 件方 控制 硬件 系统 项 目设 计 序 逻 辑 控 架构选型 + 控 件系 统 + 控 案设 计 实现 计 与 制 控 制 控制 软件 控 制 软 硬 控制 算法 控 制 软 硬 控制 模型 控制 算法 制 作 指 动 态 过 软件 算法 开发 硬 件 方 案 算法 代码 程序 硬 件 系 统 模型 算法 设计 算法 软件 实现 指 导 程 控 制 案 统 控制系统简图的算法设计/软件实现
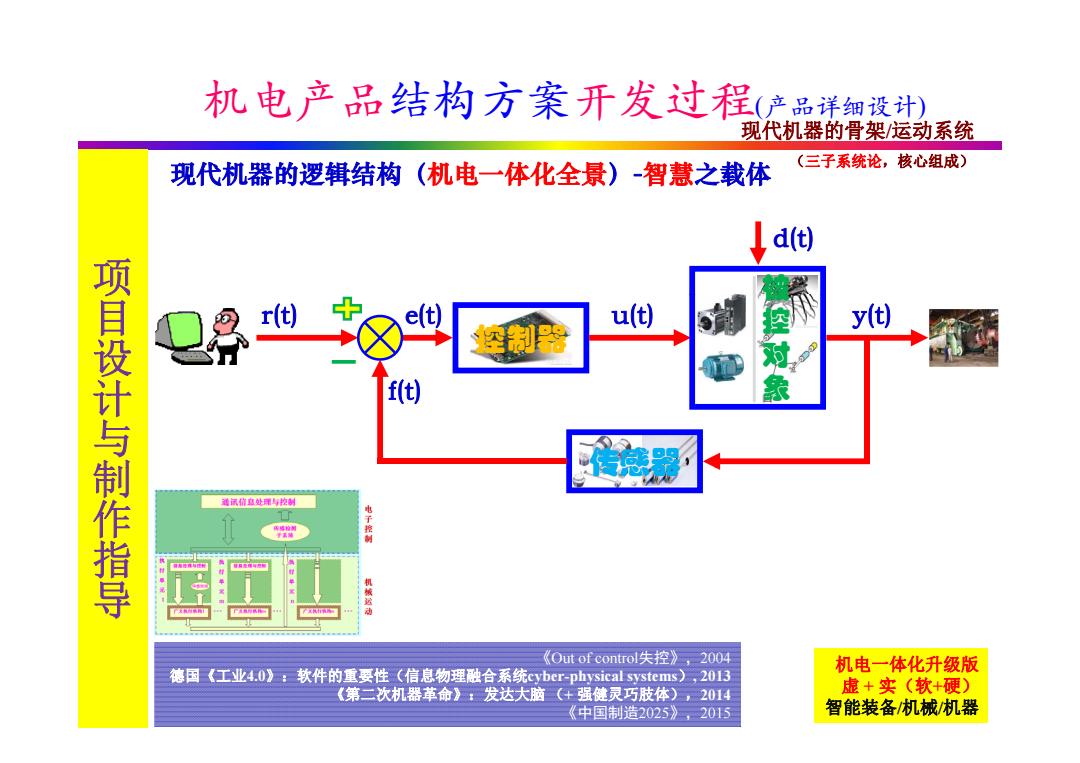
机电产品结构方案开发过程(产品详细设计) 现代机器的骨架/运动系统 现代机器的逻辑结构(机电一体化全景)-智慧之载体 (三子系统论,核心组成) ld(t) r(t) u(t) ) 项目设计与制作指导 空制器 f(t) 传感器 通闲信直处用控制 电子挖制 机械动 《0 ut of control失控》,2004 德国《工业4.0》:软件的重要性(信息物理融合系统cyber-physical systems),2013 机电一体化升级版 《第二次机器革命》:发达大脑(+强健灵巧肢体),2014 虚+实(软+硬) 《中国制造2025》,2015 智能装备/机械/机器
现代机器的骨架 运动系统 机电产品结构方案开发过程(产品详细设计) 现代机器的逻辑结构(机电一体化全景)-智慧之载体 现代机器的骨架/运动系统 (三子系统论,核心组成) 项 d(t) 目设 被 计 控制器 e(t) f( ) r(t) u(t) y(t) 被 控 对 计 象 与 制 传感器 f(t) 象 制 作 指 传感器 导 机电一体化升级版 虚 + 实(软+硬) 智能装备/机械/机器 《Out of control失控》,2004 德国《工业4.0》:软件的重要性(信息物理融合系统cyber-physical systems), 2013 《第二次机器革命》:发达大脑 (+ 强健灵巧肢体),2014 《中国制造2025》,2015