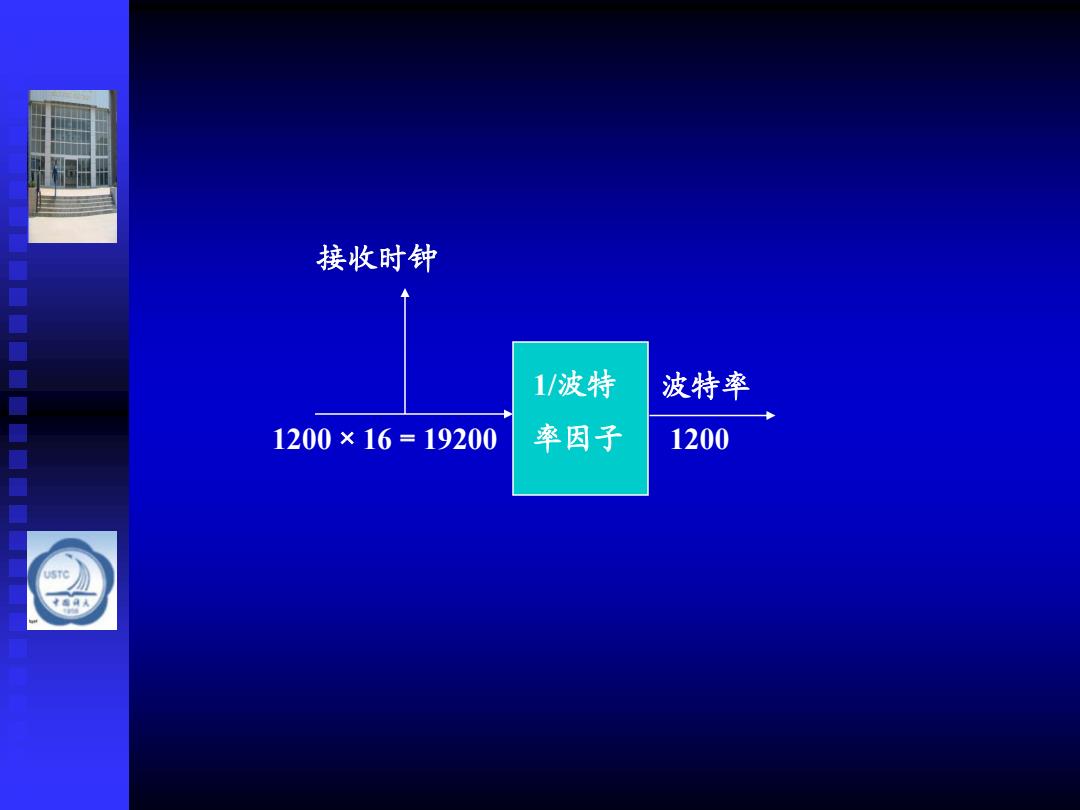
接收时钟 1/波特 波特率 1200×16=19200 率因子 1200 》
1/波特 波特率 率因子 接收时钟 1200×16=19200 1200

16T RxD DATA 扇动拉 RxC MU 12345678910111213141516123456?8910 启动检测 确自动位 采样数据

8.2串行通信的基本技术 、 串行通信方式 1、异步通讯 异步通信是指以字符为单位传送数据, 用起始位和停止位标识每个字符的开始和 结束字符,两次传送时间隔不固定。 2、 同步通信 异步通讯为了可靠地传送数据,在每 次传送数据的同时,附加了一些标志位。 在大量数据传送时,为了提高速度,就去 掉这些标志,这就是同步通讯。采用同步 传送,在数据块开始处要用同步字符来指 示,并在发送端和接收端之间要用时钟来 实现同步
8.2 串行通信的基本技术 一、串行通信方式 1、 异步通讯 异步通信是指以字符为单位传送数据, 用起始位和停止位标识每个字符的开始和 结束字符,两次传送时间隔不固定。 2、 同步通信 异步通讯为了可靠地传送数据,在每 次传送数据的同时,附加了一些标志位。 在大量数据传送时,为了提高速度,就去 掉这些标志,这就是同步通讯。采用同步 传送,在数据块开始处要用同步字符来指 示,并在发送端和接收端之间要用时钟来 实现同步
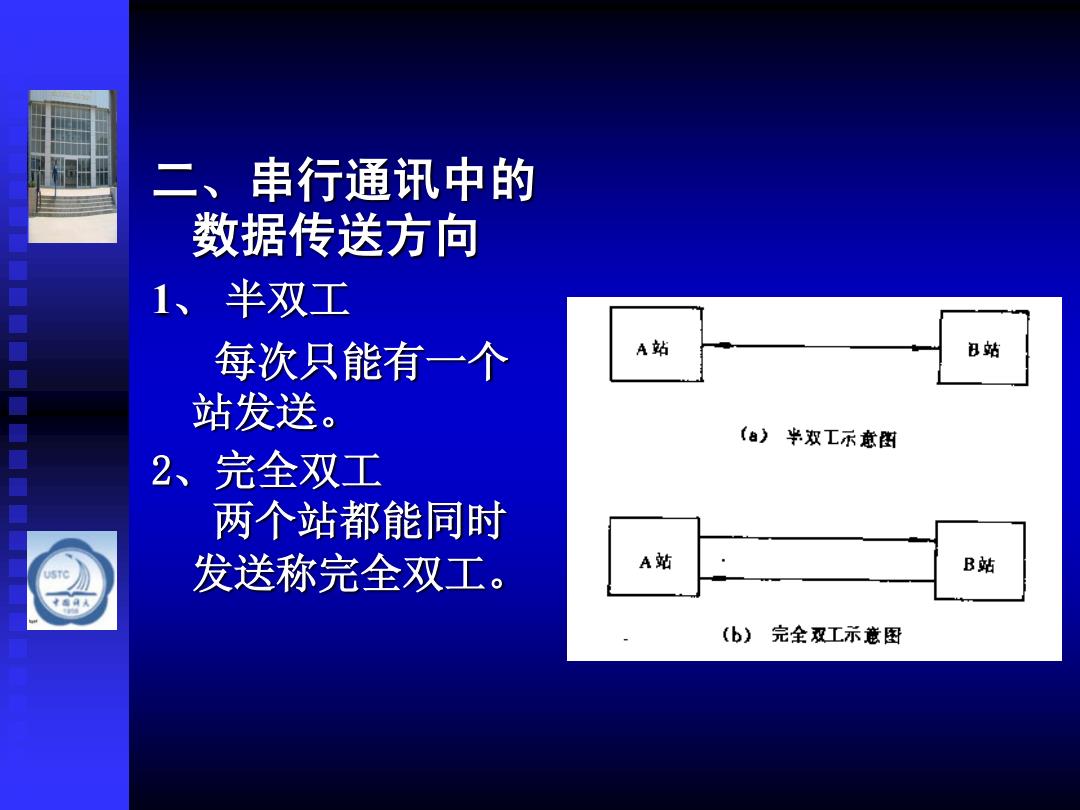
二、串行通讯中的 数据传送方向 1、半双工 每次只能有一个 A站 8站 站发送。 (a)半双工示意图 2、完全双工 两个站都能同时 发送称完全双工。 A站 B站 (b)完全双工示意图
二、串行通讯中的 数据传送方向 1、 半双工 每次只能有一个 站发送。 2、完全双工 两个站都能同时 发送称完全双工
三、异步接收/发送器 (UART) 串行接口的基本结构主要是异步接收/ 发送器(UART),它不仅包括并行数据 和串行数据之间的相互转换,还有检测 串行通信在传送过程中可能发生错误的 逻辑部件
三、异步接收/发送器(UART) 串行接口的基本结构主要是异步接收/ 发送器(UART),它不仅包括并行数据 和串行数据之间的相互转换,还有检测 串行通信在传送过程中可能发生错误的 逻辑部件