第7章 离散时间系统的时域分析 7.1离散时间信号 7.2离散时间系统的数学模型 7.3常系数线性差分方程的求解 7.4零输入响应与零状态响应 7.5卷积
第7章 离散时间系统的时域分析 7.3 常系数线性差分方程的求解 7.1 离散时间信号 7.2 离散时间系统的数学模型 7.4 零输入响应与零状态响应 7.5 卷积
离散时间系统:激励与响应都是离散时间信号的系统。 离散时间系统的优点 精度高 可靠性好 功能灵活 时分复用 保密性好 便于大规模集成
离散时间系统的优点 精度高 可靠性好 功能灵活 时分复用 保密性好 便于大规模集成 离散时间系统:激励与响应都是离散时间信号的系统
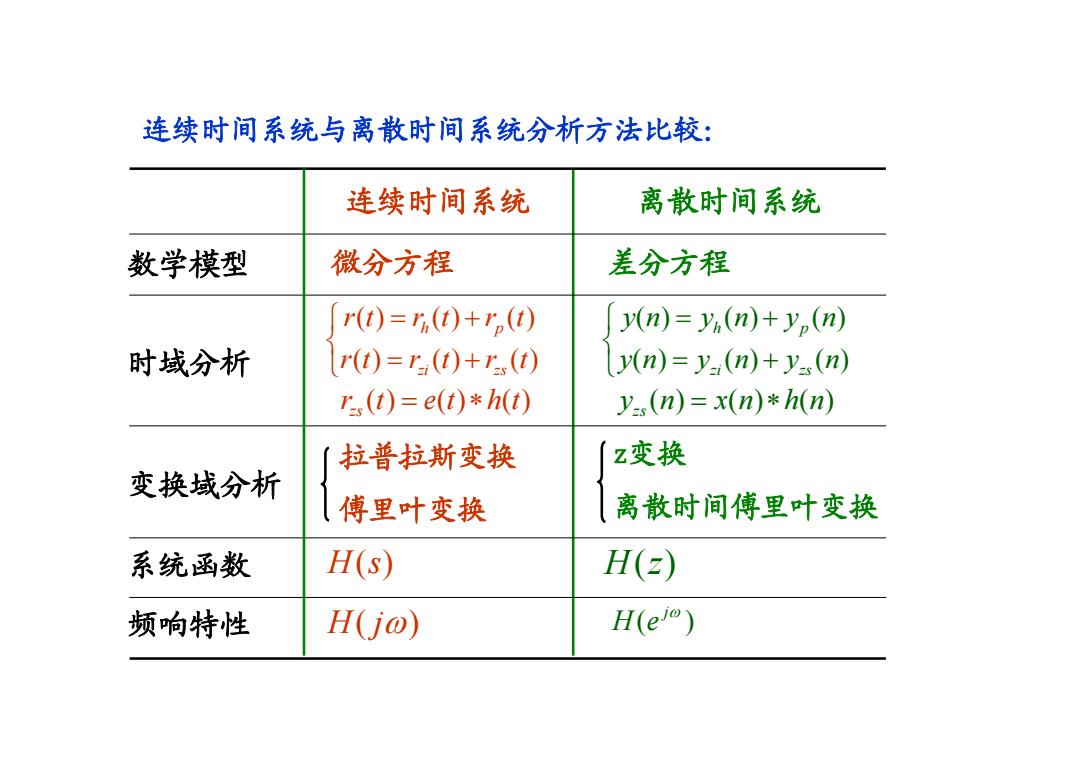
连续时间系统与离散时间系统分析方法比较: 连续时间系统 离散时间系统 数学模型 微分方程 差分方程 r(t)=r(t)+r(t) y(n)=yi(n)+y(n) 时域分析 r(t)=r(t)+r(t) y(n)=y:(n)+y(n) r(t)=e(t)*h(t) y.(n)=x(n)*h(n) 拉普拉斯变换 z变换 变换域分析 傅里叶变换 离散时间傅里叶变换 系统函数 H(s) H( 频响特性 H(jo) H(e)
连续时间系统与离散时间系统分析方法比较: 数学模型 微分方程 差分方程 系统函数 时域分析 变换域分析 频响特性 拉普拉斯变换 傅里叶变换 z变换 离散时间傅里叶变换 H ( s ) H ( j ω) H ( z ) ( ) j ω H e 连续时间系统 离散时间系统 () () () () () () h p zi zs rt r t r t rt r t r t ⎧ = + ⎨ ⎩ = + () () () zs r t et ht = ∗ () () () () () () h p zi zs y n y n y n y n y n y n ⎧ = + ⎨ ⎩ = + () () () zs y n xn hn = ∗
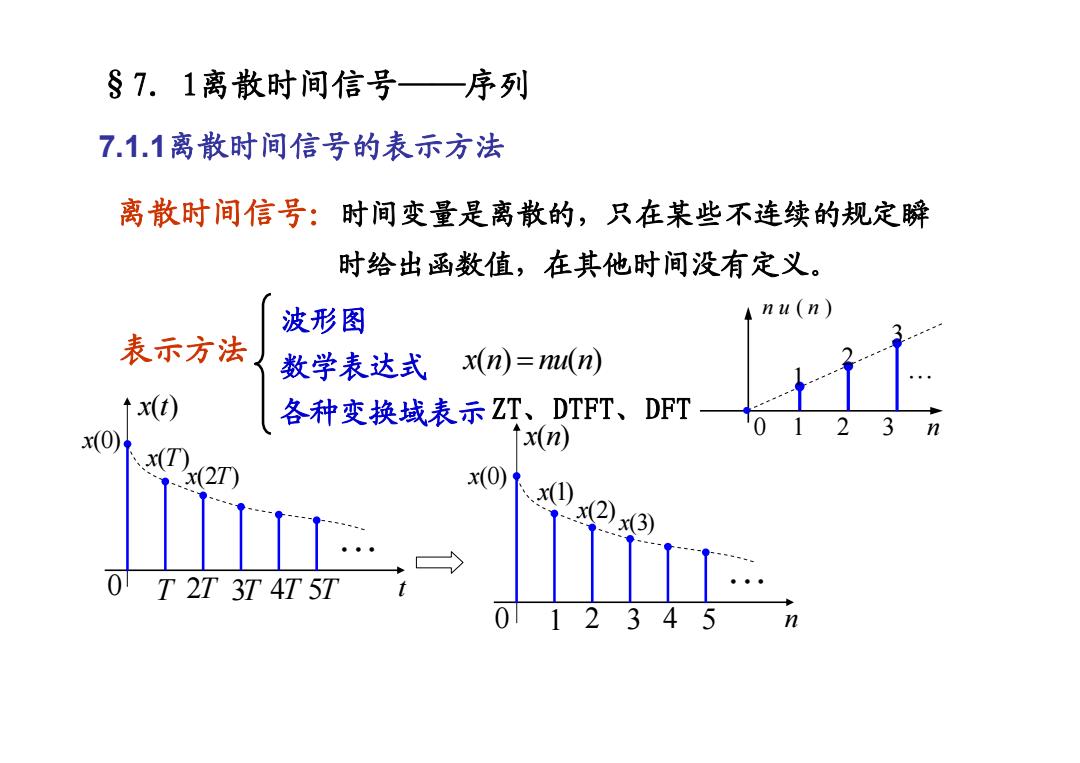
§7.1离散时间信号一序列 7.1.1离散时间信号的表示方法 离散时间信号:时间变量是离散的,只在某些不连续的规定瞬 时给出函数值,在其他时间没有定义。 波形图 A nu(n) 表示方法 数学表达式x(n)=mu(n) ↑x(t) 各种变换域表示ZT、DTFT、DFT一 x(n) x(2T) x(0)1 x(3) 0 T 2T 3T 4T 5T 012345
§7. 1离散时间信号——序列 7.1.1离散时间信号的表示方法 离散时间信号:时间变量是离散的,只在某些不连续的规定瞬 时给出函数值,在其他时间没有定义。 x( )t x(0) x(T) x(2T) T 2T 3T 4T 5T t L 0 x( ) n x(0) x(1) x(2) x(3) 1 2 3 4 5 n L 0 波形图 数学表达式 各种变换域表示 表示方法 x() () n nu n = ZT、DTFT、DFT 0 1 2 3 n nu n( ) • 1 2 3
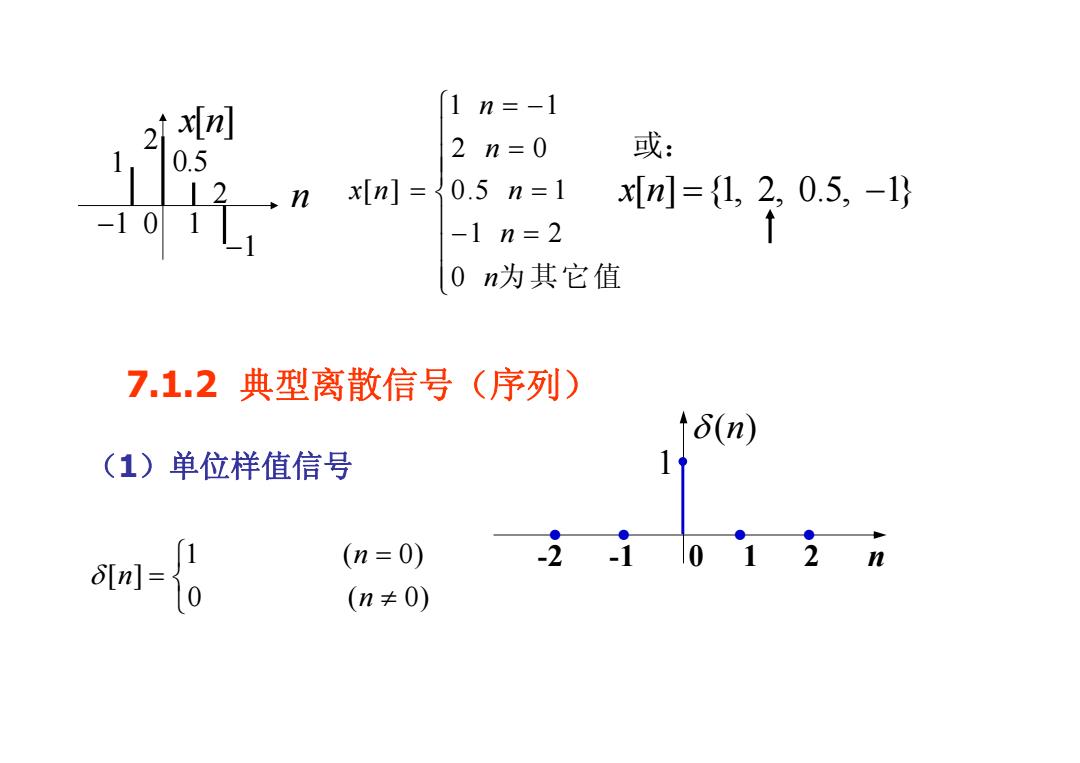
xn 1n=-1 2 0.5 2n=0 或: ↓2nxm=0.5n=1 x[n]={1,2,0.5,-l -101 -1 n=2 0n为其它值 7.1.2典型离散信号(序列) t6(n) (1)单位样值信号 otl- (n=0) 2i01 2 1 (n≠0)
1 1 2 0 [ ] 0.5 1 1 2 0 n n xn n n n ⎧ = − ⎪ = ⎪⎪ = = ⎨⎪− = ⎪⎪⎩ 为其它值x n[ ] {1, 2, 0.5, 1} = − 或: −1 0 1 2 n x[ ] n 2 1 −1 0.5 (1)单位样值信号 1 ( 0) [ ] 0 ( 0) n n n δ ⎧ = = ⎨⎩ ≠ 7.1.2 典型离散信号(序列) -2 -1 0 1 2 n • • • • δ ( ) n 1