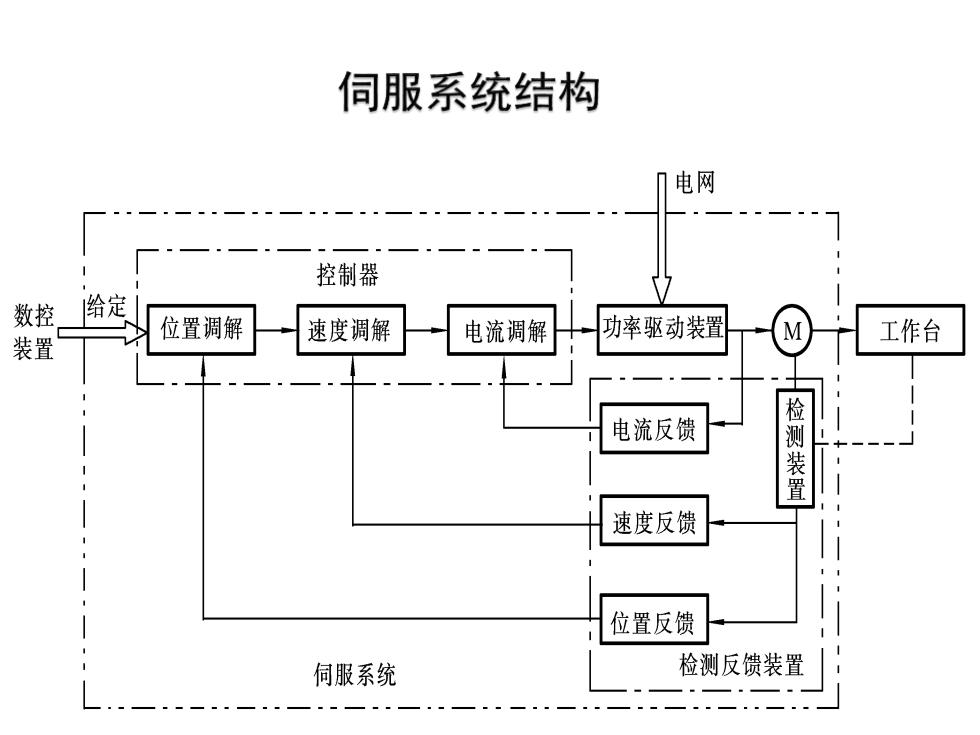
伺服系统结构 电网 控制器 数控 给定 位置调解 速度调解 电流调解 功率驱动装置 装置 工作台 电流反馈 检测装置 速度反馈 、 位置反馈 伺服系统 检测反馈装置
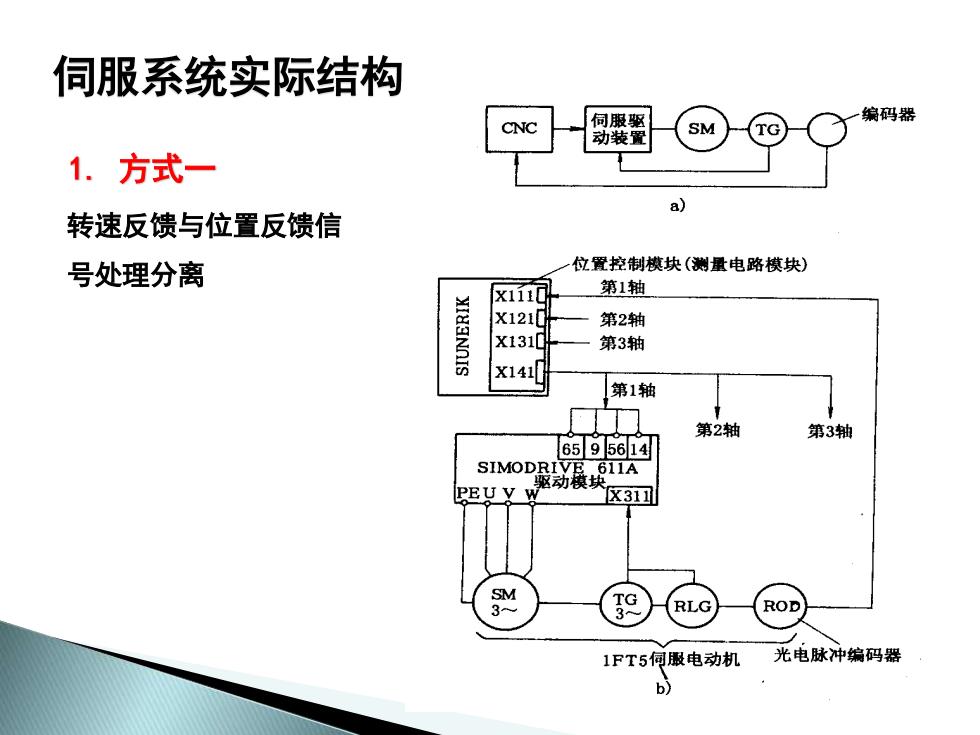
伺服系统实际结构 CNC 伺服驱 编码器 TG 动装置 SM 1.方式一 a) 转速反馈与位置反馈信 号处理分离 位置控制模块(测量电路模块) x1110 第1轴 XI8SNNIS X1210 第2轴 X1310 第3轴 x1410 第1轴 第2轴 第3轴 6595614 SIoD聚癢好 PEUV w 区311 SM 39 RLG ROD 1FT5伺最电动机 光电脉冲编码器 b)
1. 方式一 转速反馈与位置反馈信 号处理分离 伺服系统实际结构

伺服系统实际结构 2.方式二 编码器同时作为转速和 编码器 CNC 伺服驱 动装置 SM 位置检测,处理均在数 控系统中完成 a) CNC JVIB UM JV2B SM PC 3 a系列伺服PB R 驱动单元 UL M PC 脉冲编码器 b)
2. 方式二 编码器同时作为转速和 位置检测,处理均在数 控系统中完成 伺服系统实际结构
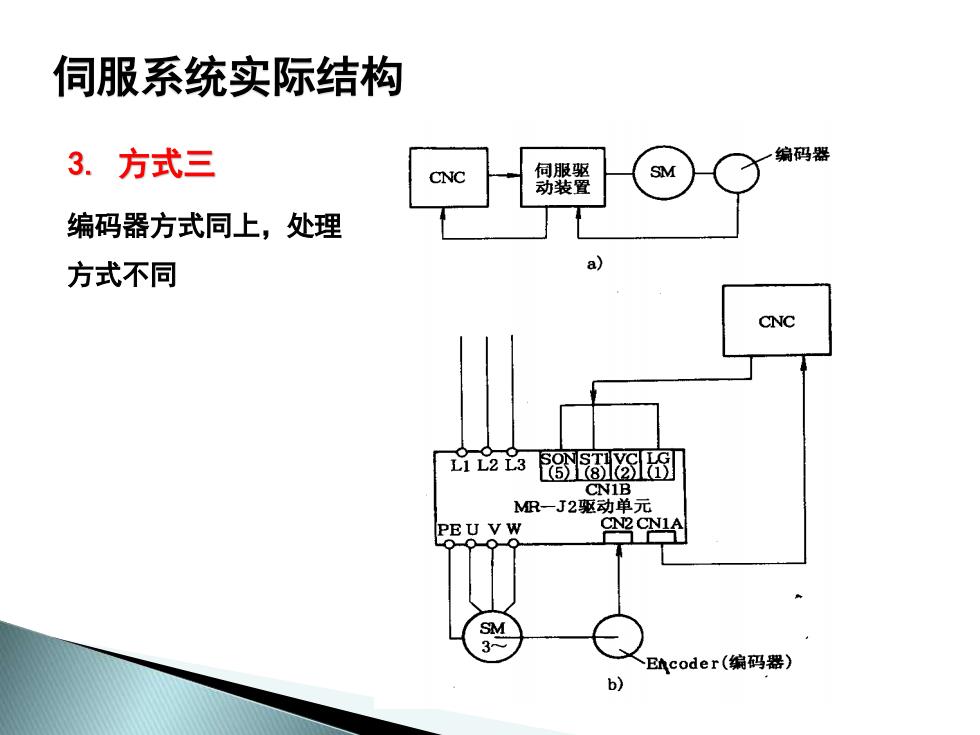
伺服系统实际结构 3.方式三 编码器 CNC 伺服驱 SM 动装置 编码器方式同上,处理 方式不同 a CNC 2阁 CNIB MR-J2驱动单元 PEU VW SM Encoder(编码器) b)
3. 方式三 编码器方式同上,处理 方式不同 伺服系统实际结构
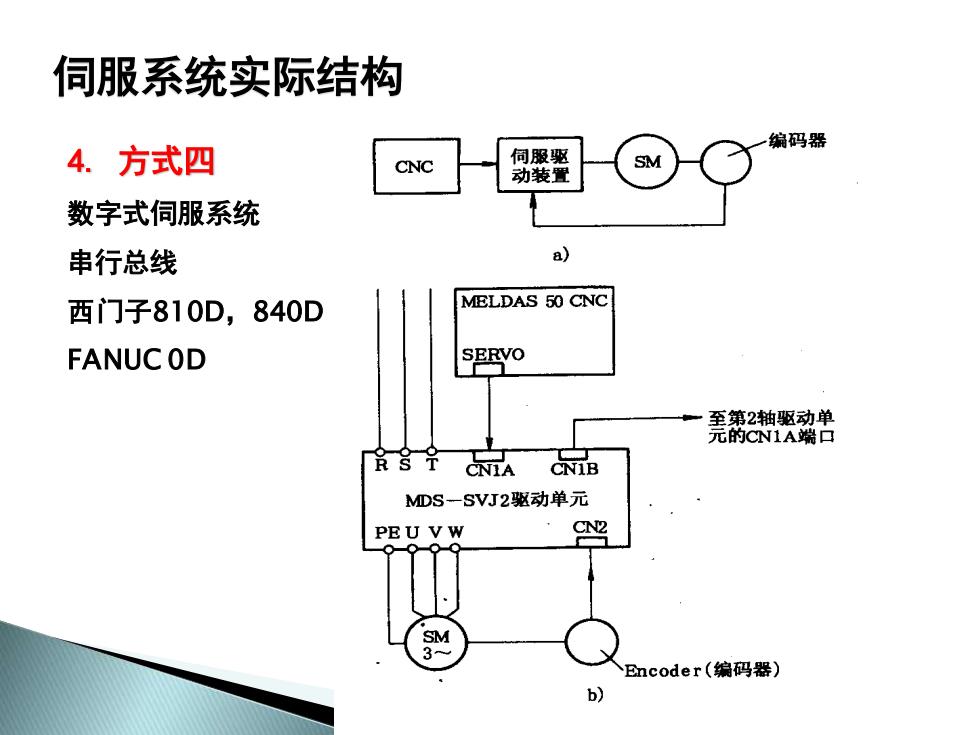
伺服系统实际结构 编码器 4.方式四 伺服驱 CNC SM 动装置 数字式伺服系统 串行总线 a) 西门子810D,840D MELDAS 50 CNC FANUC OD SERVO 至第2轴驱动单 元的CN1A端口 CNIA CN1B MDS-SVJ2驱动单元 PEUVW SM Encoder(编码器) b)
4. 方式四 数字式伺服系统 串行总线 西门子810D,840D FANUC 0D 伺服系统实际结构