机械已D基础 二维与三维 CAD基础2010第三讲 图形编辑命令及几何变换 中国石油大学机电学院ww.jdxy.com
中国石油大学机电学院 www.jdxy.com 机械CAD基础 二维与三维 CAD基础2010 第三讲 图形编辑命令及几何变换
机械☑纪基础 二维与三维 图形编辑 图形的编辑包括图形中图元的修改和整个图形的形 状或位置的变化。 中国石油大学机电学院www.jdxy.com
中国石油大学机电学院 www.jdxy.com 机械CAD基础 二维与三维 一、图形编辑 图形的编辑包括图形中图元的修改和整个图形的形 状或位置的变化
机械CAD基础 二维与三维 二、图形的几何变换 (一)齐次坐标表示法。 二维点(X,Y)用三维坐标(X,Y,H)表示。 三维点(X,Y,Z)用四维坐标(X,Y,Z,H)表示。 用N+1维坐标表示N维坐标的方法称为齐次坐标表示法。 当取H=1时称为正常化齐次坐标。 空间点的坐标表示为(X,Y,Z,1)的形式。 平面图形二维点的坐标可表示为(X,Y,1)的形式。 点用齐次坐标表示的目的就在于以矩阵统一表示各种图 形的变换。 中国石油大学机电学院 www.jdxy.com
中国石油大学机电学院 www.jdxy.com 机械CAD基础 二维与三维 二、图形的几何变换 (一)齐次坐标表示法。 二维点(X,Y)用三维坐标(X,Y,H)表示。 三维点(X,Y,Z)用四维坐标(X,Y,Z,H)表示。 用N+1维坐标表示N维坐标的方法称为齐次坐标表示法。 当取H=1时称为正常化齐次坐标。 空间点的坐标表示为(X,Y,Z,1)的形式。 平面图形二维点的坐标可表示为(X,Y,1)的形式。 点用齐次坐标表示的目的就在于以矩阵统一表示各种图 形的变换
机械已AD基础 二维与三维 图形变换是指对图形的几何信息进行几何变换后产生 新的图形。 计算机图形学传统的表达方法,二维点的齐次坐标 矩阵P,统一的图形变换矩阵T可分别表示为: a b p P=x y 1 T- d 9 变化后新坐标为P* m 0 b *y*h]= x y 1]c d = ax+cy+1 bx+dy+m px+gy+s] m 正常化处理后坐标为P ky小茶茶 ax+cy+1 bx+dy+m px+gy+s px+gy+s 中国石油大学机电学院www.jdxy.com
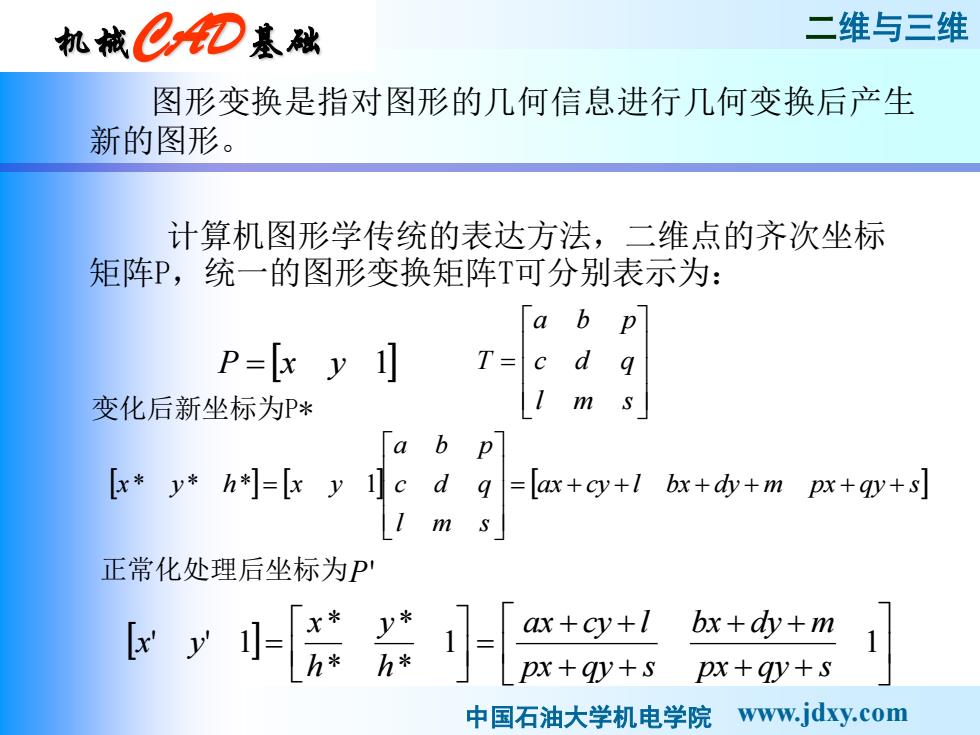
中国石油大学机电学院 www.jdxy.com 机械CAD基础 二维与三维 图形变换是指对图形的几何信息进行几何变换后产生 新的图形。 计算机图形学传统的表达方法,二维点的齐次坐标 矩阵P,统一的图形变换矩阵T可分别表示为: P = x y 1 = l m s c d q a b p T 变化后新坐标为P* ax cy l bx dy m px qy s l m s c d q a b p x y h x y = + + + + + + * * * = 1 正常化处理后坐标为 P' + + + + + + + + = = 1 1 * * * * ' ' 1 px qy s bx dy m px qy s ax cy l h y h x x y
机械已D基础 二维与三维 (二)基本变换: 包括恒等变换、比例变换、镜像变换、旋转变换、平 移变换、错切变换等。 1、比例变换:通过SCALE命令可以实现图形的放大或缩小操作。 变换矩阵可表示为: a 0 0 Ts= 0 d 0 0 图形变换可以通过比例因子、d或全比例因子s分别控制。 比例变换后的新点P为 a o 0> x y ]=x y 1]0 d 0[x正常化 00 中国石油大学机电学院 www.jdxy.com
中国石油大学机电学院 www.jdxy.com 机械CAD基础 二维与三维 (二)基本变换: 包括恒等变换、比例变换、镜像变换、旋转变换、平 移变换、错切变换等。 1、比例变换:通过SCALE命令可以实现图形的放大或缩小操作。 变换矩阵可表示为: 图形变换可以通过比例因子 或全比例因子s分别控制。 比例变换后的新点 为 = s d a TS 0 0 0 0 0 0 a、d = ⎯⎯⎯⎯→ = 1 0 0 0 0 0 0 ' ' 1 1 s dy s ax ax dy s s d a x y x y 正常化 P