半闭环伺服系统 位置控制单元 速度控制单元 位置控制调节 速度控制 调节与驱动 机械执行部件 实际位 电机 置反横 检测与反位单元一 ☆位置检测元件安装在电动机轴上或丝杠上,用以精确控制电机 的角度,为间接测量; ☆坐标运动的传动链有一部分在位置闭环以外,其传动误差没有 得到系统的补偿; ☆半闭环伺服系统的精度低于闭环系统。 ☆适用于精度要求适中的中小型数控机床
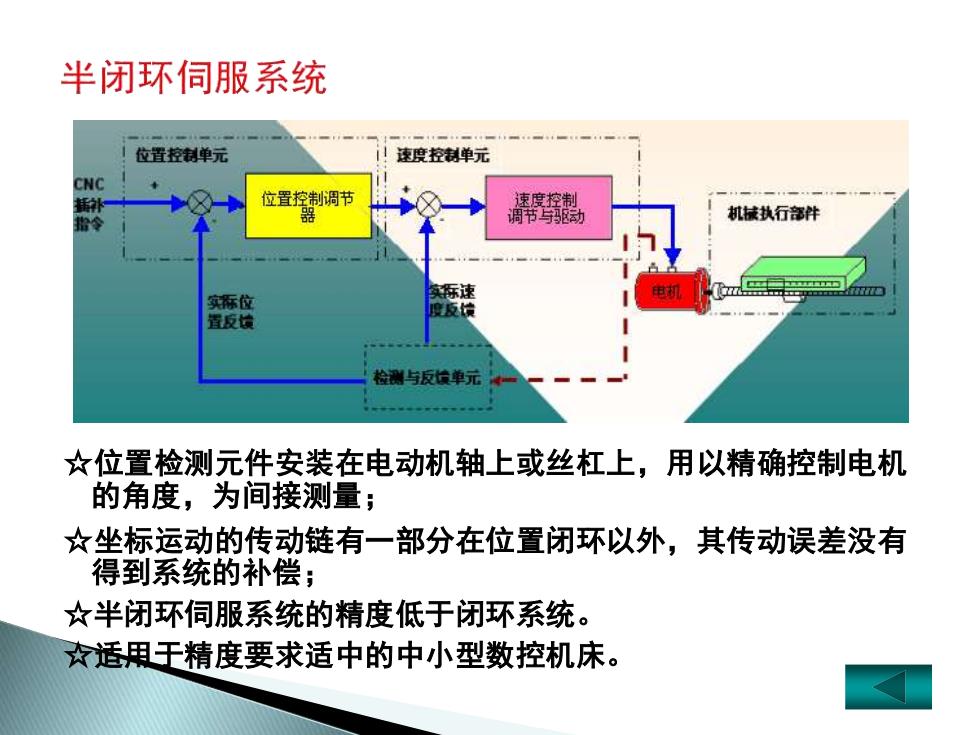
☆位置检测元件安装在电动机轴上或丝杠上,用以精确控制电机 的角度,为间接测量; ☆坐标运动的传动链有一部分在位置闭环以外,其传动误差没有 得到系统的补偿; ☆半闭环伺服系统的精度低于闭环系统。 ☆适用于精度要求适中的中小型数控机床
2.按使用的驱动元件分类 (1)电液伺服系统 ,执行元件:电液脉冲马达或电液伺服马达。 ,驱动元件:液动机或液压缸。 ,优点:低速高输出力矩,刚性好,时间常数小,反应快,速度平 稳。 缺点:需要供油系统,体积大,产生噪声和漏油等问题。 (2)电气伺服系统 执行元件:伺服电机(步进电机、交流或直流伺服电机)。 驱动元件:电力电子器件。 现代数控机床均采用电气伺服系统
(1)电液伺服系统 执行元件:电液脉冲马达或电液伺服马达。 驱动元件:液动机或液压缸。 优点:低速高输出力矩,刚性好,时间常数小,反应快,速度平 稳。 缺点:需要供油系统,体积大,产生噪声和漏油等问题。 (2)电气伺服系统 执行元件:伺服电机(步进电机、交流或直流伺服电机)。 驱动元件:电力电子器件。 现代数控机床均采用电气伺服系统
3.按被控对象分类 (1)进给伺服系统 控制机床各坐标轴的切削进给运动,提供切削过程所需的转矩, 具有定位和轮廓跟踪功能。 包括速度控制环和位置控制环。 (2)主轴伺服系统 ,控制机床主轴的旋转运动,提供所需的驱动功率和切削力。 一般的主轴控制只有一个速度控制系统,具有C轴控制的主轴 伺服系统与进给伺服系统相同,是一般概念的位置伺服控制系 统。 刀库的位置控制是简单的位置伺服控制
(1)进给伺服系统 控制机床各坐标轴的切削进给运动,提供切削过程所需的转矩, 具有定位和轮廓跟踪功能。 包括速度控制环和位置控制环。 (2)主轴伺服系统 控制机床主轴的旋转运动,提供所需的驱动功率和切削力。 一般的主轴控制只有一个速度控制系统,具有C轴控制的主轴 伺服系统与进给伺服系统相同,是一般概念的位置伺服控制系 统。 刀库的位置控制是简单的位置伺服控制
4.按反馈比较控制方式分类 (1)数字一脉冲比较伺服系统 将数控装置发出的数字(或脉冲)指令信号与检测装置测量的以数字(或 脉冲)形式表示的反馈信号直接进行比较,产生位置差值,形成闭环和半 闭环控制。 (2)相位比较伺服系统 采用相位工作方式,指令信号与反馈信号均以相位形式表示并进行比较。 (3)幅值比较伺服系统 以位置检测信号的幅值大小来反映机床位移量的大小,并与指令信号进行 比较。 (4)全数字控制伺服系统 由位置、速度和电流组成的三环反馈控制全部数字化
(1)数字-脉冲比较伺服系统 将数控装置发出的数字(或脉冲)指令信号与检测装置测量的以数字(或 脉冲)形式表示的反馈信号直接进行比较,产生位置差值,形成闭环和半 闭环控制。 (2)相位比较伺服系统 采用相位工作方式,指令信号与反馈信号均以相位形式表示并进行比较。 (3)幅值比较伺服系统 以位置检测信号的幅值大小来反映机床位移量的大小,并与指令信号进行 比较。 (4)全数字控制伺服系统 由位置、速度和电流组成的三环反馈控制全部数字化
7.1.2伺服系统的组成 由控制器、功率驱动装置、检测反馈装置和伺服电机组成。 (1)控制器:由位置调解单元、速度调解单元和电流调解单元组成。 控制器最多构成三闭环控制:外环为位置环,中环为速度环,内环为电 流环。 (2)功率驱动装置:由驱动信号产生电路和功率放大器等组成。 ,功能:一方面按控制量大小将电网中的电能作用到电机上,调节电机力 矩的大小;另一方面按电机要求将恒压恒频的电网供电转换为电机所需 直流电或交流电。 (3)位置检测装置:闭环和半闭环伺服系统有位置检测装置,其安装位 置不同;开环伺服系统无位置检测装置。 (4)伺服电机:闭环和半闭环伺服系统采用交流或直流伺服电机;开环 伺服系统采用步进电机
由控制器、功率驱动装置、检测反馈装置和伺服电机组成。 (1)控制器:由位置调解单元、速度调解单元和电流调解单元组成。 控制器最多构成三闭环控制:外环为位置环,中环为速度环,内环为电 流环。 (2)功率驱动装置:由驱动信号产生电路和功率放大器等组成。 功能:一方面按控制量大小将电网中的电能作用到电机上,调节电机力 矩的大小;另一方面按电机要求将恒压恒频的电网供电转换为电机所需 直流电或交流电。 (3)位置检测装置:闭环和半闭环伺服系统有位置检测装置,其安装位 置不同;开环伺服系统无位置检测装置。 (4)伺服电机:闭环和半闭环伺服系统采用交流或直流伺服电机;开环 伺服系统采用步进电机