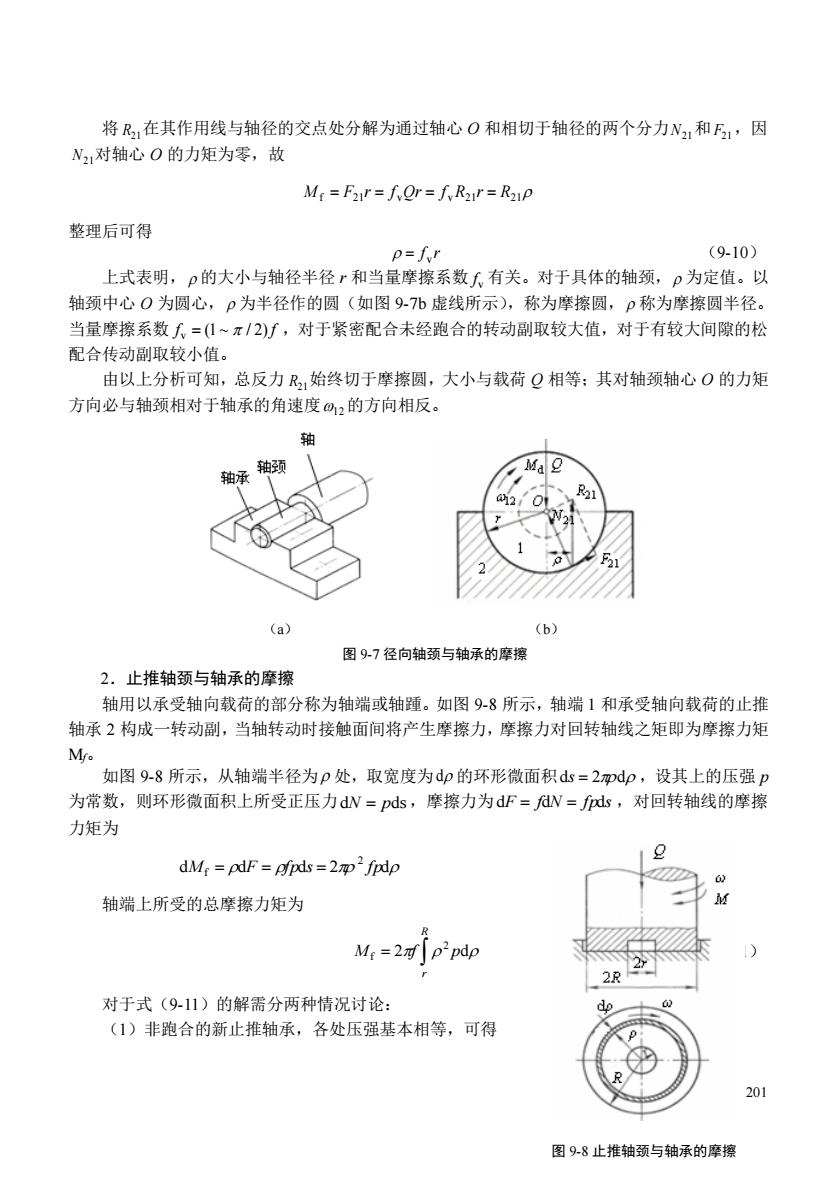
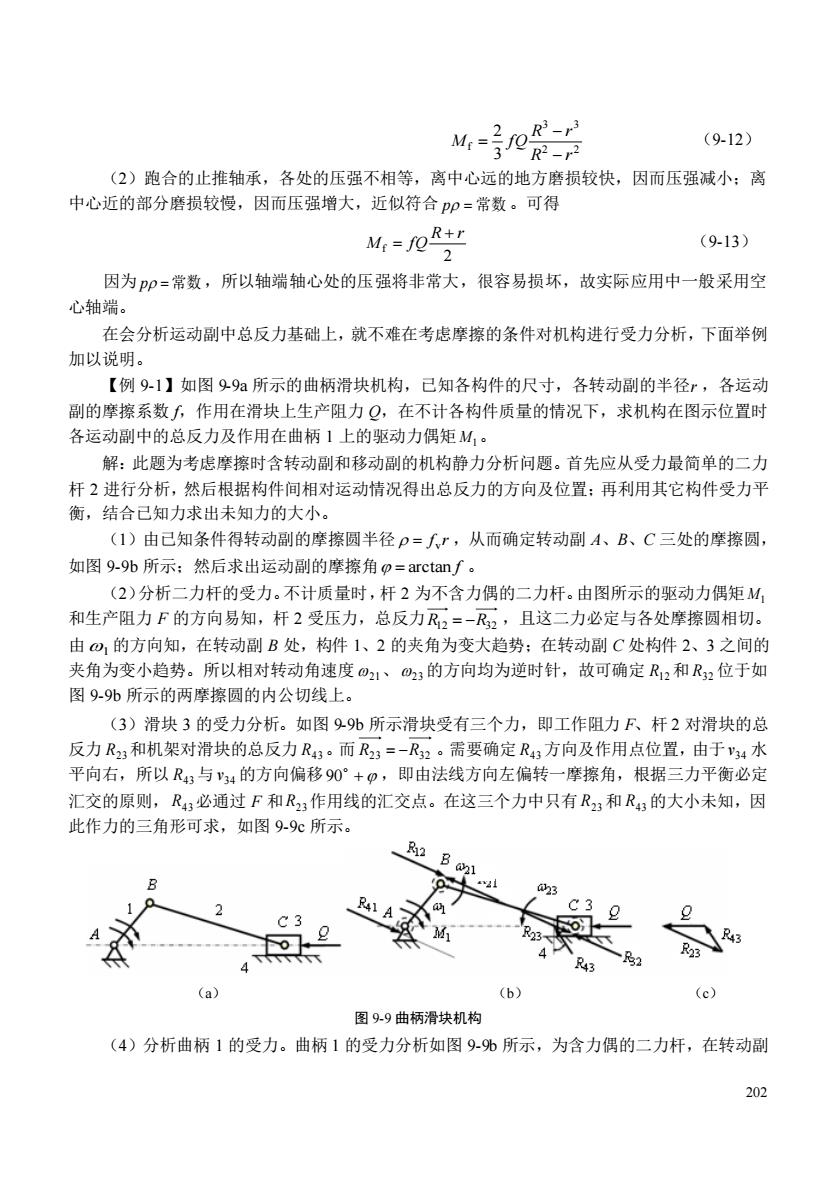
将R,在其作用线与轴径的交点处分解为通过轴心O和相切于轴径的两个分力N,和F1,因 N2对轴心O的力矩为零,故 M=Fr=人Qr=人R2r=R2P 整理后可得 p=∫r (9-10) 上式表明,的大小与轴径半径r和当量摩擦系数人有关。对于具体的轴颈,p为定值。以 轴颈中心0为圆心,p为半径作的圆(如图97b虚线所示),称为摩擦圆,p称为摩擦圆半径。 当量摩擦系数人=(1~π/2)∫,对于紧密配合未经跑合的转动副取较大值,对于有较大间隙的松 配合传动副取较小值。 由以上分析可知,总反力R,始终切于摩擦圆,大小与载荷Q相等:其对轴颈轴心O的力矩 方向必与轴颈相对于轴承的角速度2的方向相反。 Ma (a) (b) 图97径向轴颈与轴承的摩擦 2.止推轴颈与轴承的摩擦 轴用以承受轴向载荷的部分称为轴端或轴踵。如图9-8所示,轴端1和承受轴向载荷的止推 轴承2构成一转动副,当轴转动时接触面间将产生摩擦力,摩擦力对回转轴线之矩即为摩擦力矩 M。 如图9-8所示,从轴端半径为p处,取宽度为dp的环形微面积ds=2dp,设其上的压强p 为常数,则环形微面积上所受正压力dN=pds,摩擦力为dF=N=ds,对回转轴线的摩擦 力矩为 dMs =pdF pfpds=2fpdo 轴端上所受的总摩擦力矩为 M=2对fp2pdp 2R 对于式(911)的解需分两种情况讨论 (1)非跑合的新止推轴承,各处压强基本相等,可得 201 图9-8止推轴颈与轴承的摩擦
201 将 R21 在其作用线与轴径的交点处分解为通过轴心 O 和相切于轴径的两个分力 N21 和 F21,因 N21 对轴心 O 的力矩为零,故 M f = F21r = f vQr = f vR21r = R21 整理后可得 f r = v (9-10) 上式表明, 的大小与轴径半径 r 和当量摩擦系数 v f 有关。对于具体的轴颈, 为定值。以 轴颈中心 O 为圆心, 为半径作的圆(如图 9-7b 虚线所示),称为摩擦圆, 称为摩擦圆半径。 当量摩擦系数 f (1 ~ / 2) f v = ,对于紧密配合未经跑合的转动副取较大值,对于有较大间隙的松 配合传动副取较小值。 由以上分析可知,总反力 R21 始终切于摩擦圆,大小与载荷 Q 相等;其对轴颈轴心 O 的力矩 方向必与轴颈相对于轴承的角速度 12 的方向相反。 (a) (b) 图 9-7 径向轴颈与轴承的摩擦 2.止推轴颈与轴承的摩擦 轴用以承受轴向载荷的部分称为轴端或轴踵。如图 9-8 所示,轴端 1 和承受轴向载荷的止推 轴承 2 构成一转动副,当轴转动时接触面间将产生摩擦力,摩擦力对回转轴线之矩即为摩擦力矩 Mf。 如图 9-8 所示,从轴端半径为 处,取宽度为 d 的环形微面积 ds = 2d ,设其上的压强 p 为常数,则环形微面积上所受正压力 d ds N p = ,摩擦力为 dF = fdN = fpds ,对回转轴线的摩擦 力矩为 d d d 2 d 2 f M = F = f p s = f p 轴端上所受的总摩擦力矩为 = R r M 2f pd 2 f (9-11) 对于式(9-11)的解需分两种情况讨论: (1)非跑合的新止推轴承,各处压强基本相等,可得 图 9-8 止推轴颈与轴承的摩擦
M-号e是子 (9-12) (2)跑合的止推轴承,各处的压强不相等,离中心远的地方磨损较快,因而压强减小:离 中心近的部分磨损较慢,因而压强增大,近似符合p印=常数。可得 M=e生 (9.13) 因为p=常数,所以轴端轴心处的压强将非常大,很容易损坏,故实际应用中一般采用空 心轴端。 在会分析运动副中总反力基础上,就不难在考虑摩擦的条件对机构进行受力分析,下面举例 加以说明。 【例9-1】如图99a所示的曲柄滑块机构,已知各构件的尺寸,各转动副的半径r,各运动 副的摩擦系数作用在滑块上生产阻力Q,在不计各构件质量的情况下,求机构在图示位置时 各运动副中的总反力及作用在曲柄1上的驱动力偶矩M。 解:此题为考虑摩擦时含转动副和移动副的机构静力分析问题。首先应从受力最简单的二力 杆2进行分析,然后根据构件间相对运动情况得出总反力的方向及位置:再利用其它构件受力平 衡,结合已知力求出未知力的大小。 (1)由已知条件得转动副的摩擦圆半径P=∫r,从而确定转动副A、B、C三处的摩擦圆, 如图9-9所示:然后求出运动副的摩擦角p=arctanf。 (2)分析二力杆的受力。不计质量时,杆2为不含力偶的二力杆。由图所示的驱动力偶矩M 和生产阻力F的方向易知,杆2受压力,总反力R=-R,且这二力必定与各处摩擦圆相切, 由⊙1的方向知,在转动副B处,构件1、2的夹角为变大趋势:在转动副C处构件2、3之间的 夹角为变小趋势。所以相对转动角速度021、2:的方向均为逆时针,故可确定R12和R2位于如 图99外所示的两摩擦圆的内公切线上。 (3)滑块3的受力分析。如图99%所示滑块受有三个力,即工作阻力F、杆2对滑块的总 反力R2,和机架对滑块的总反力R3。而R2=-R2。需要确定R,方向及作用点位置,由于4水 平向右,所以R,与y:的方向偏移90°+0,即由法线方向左偏转一摩擦角,根据三力平衡必定 汇交的原则,R,必通过F和R:作用线的汇交点。在这三个力中只有R:和R,的大小未知,因 此作力的三角形可求,如图9-9c所示。 、2 2 C3 9 R 0 4 R43 (a) (b) (c) 图9-9曲柄滑块机构 (4)分析曲柄1的受力。曲柄1的受力分析如图9%所示,为含力偶的二力杆,在转动副 202
202 2 2 3 3 f 3 2 R r R r M fQ − − = (9-12) (2)跑合的止推轴承,各处的压强不相等,离中心远的地方磨损较快,因而压强减小;离 中心近的部分磨损较慢,因而压强增大,近似符合 p = 常数 。可得 2 f R r M fQ + = (9-13) 因为 p = 常数 ,所以轴端轴心处的压强将非常大,很容易损坏,故实际应用中一般采用空 心轴端。 在会分析运动副中总反力基础上,就不难在考虑摩擦的条件对机构进行受力分析,下面举例 加以说明。 【例 9-1】如图 9-9a 所示的曲柄滑块机构,已知各构件的尺寸,各转动副的半径 r ,各运动 副的摩擦系数 f,作用在滑块上生产阻力 Q,在不计各构件质量的情况下,求机构在图示位置时 各运动副中的总反力及作用在曲柄 1 上的驱动力偶矩 M1。 解:此题为考虑摩擦时含转动副和移动副的机构静力分析问题。首先应从受力最简单的二力 杆 2 进行分析,然后根据构件间相对运动情况得出总反力的方向及位置;再利用其它构件受力平 衡,结合已知力求出未知力的大小。 (1)由已知条件得转动副的摩擦圆半径 f r = v ,从而确定转动副 A、B、C 三处的摩擦圆, 如图 9-9b 所示;然后求出运动副的摩擦角 = arctan f 。 (2)分析二力杆的受力。不计质量时,杆 2 为不含力偶的二力杆。由图所示的驱动力偶矩 M1 和生产阻力 F 的方向易知,杆 2 受压力,总反力 R12 = −R32 ,且这二力必定与各处摩擦圆相切。 由 1 的方向知,在转动副 B 处,构件 1、2 的夹角为变大趋势;在转动副 C 处构件 2、3 之间的 夹角为变小趋势。所以相对转动角速度 21、23 的方向均为逆时针,故可确定 R12 和 R32 位于如 图 9-9b 所示的两摩擦圆的内公切线上。 (3)滑块 3 的受力分析。如图 9-9b 所示滑块受有三个力,即工作阻力 F、杆 2 对滑块的总 反力 R23 和机架对滑块的总反力 R43。而 R23 = −R32 。需要确定 R43 方向及作用点位置,由于 34 v 水 平向右,所以 R43 与 34 v 的方向偏移 + 90 ,即由法线方向左偏转一摩擦角,根据三力平衡必定 汇交的原则, R43 必通过 F 和 R23 作用线的汇交点。在这三个力中只有 R23 和 R43 的大小未知,因 此作力的三角形可求,如图 9-9c 所示。 (a) (b) (c) 图 9-9 曲柄滑块机构 (4)分析曲柄 1 的受力。曲柄 1 的受力分析如图 9-9b 所示,为含力偶的二力杆,在转动副