
4.2位置检测装置 A (2)原理 光敏元件 透光狭缝 码盘基片 光横板 透镜 Z☑BA 信号处理装置 节距r□ 光源 m+r/4 将机械转角位移变成电脉冲 ZZBBAA 16
16 (2)原理 将机械转角位移变成电脉冲 信号处理装置 Z B A 码盘基片 透镜 光源 光敏元件 透光狭缝 光欄板 节距τ Z Z B B A A m+τ/4 4.2 位置检测装置

4.2位置检测装置 光敏元件把光信号转换成 电信号,通过信号处理装置 90° 的整形、放大等处理后输出。B 输出的波形有六路: A、A B、B、Z、Z 码盘转一圈 17
17 A B 90° Z . 码盘转一圈 光敏元件把光信号转换成 电信号,通过信号处理装置 的整形、放大等处理后输出。 输出的波形有六路: A 、A B、B、Z、Z 4.2 位置检测装置
4.2位置检测装置 >输出信号的作用及其处理 A、B两相的作用: ◆ 根据脉冲数目可测角位移 ◆ 根据脉冲频率可得轴的转速 ◆根据A、B两相的相位超前滞后关系可判断被 测轴旋转方向 18
18 输出信号的作用及其处理 A、B两相的作用: 根据脉冲数目可测角位移 根据脉冲频率可得轴的转速 根据A、B两相的相位超前滞后关系可判断被 测轴旋转方向 4.2 位置检测装置
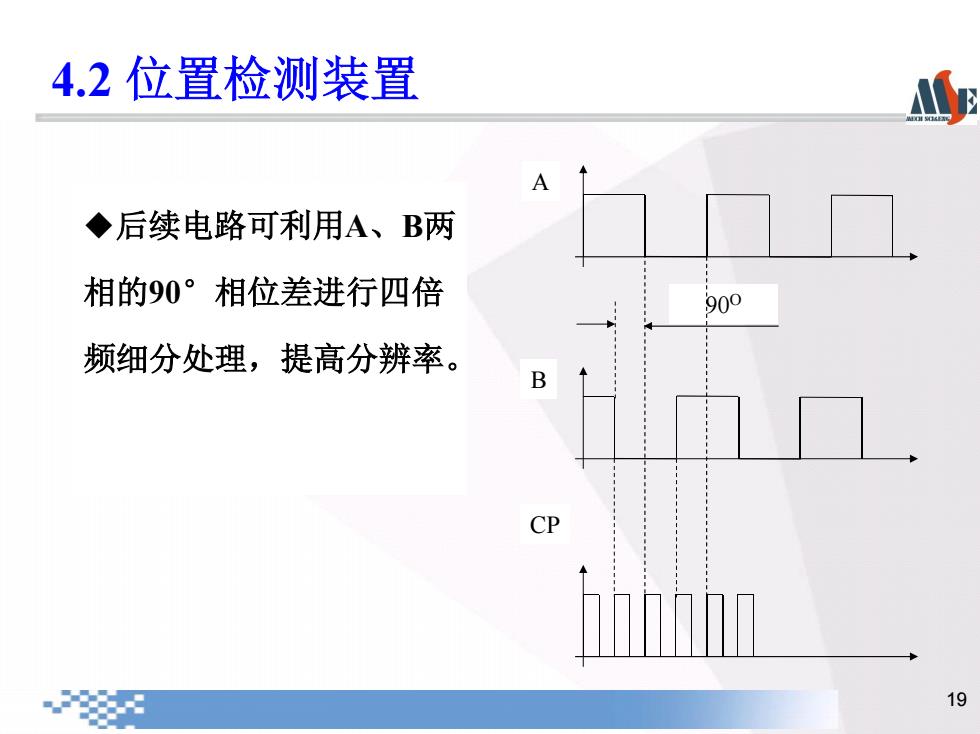
4.2位置检测装置 ◆后续电路可利用A、B两 相的90°相位差进行四倍 900 频细分处理,提高分辨率。 B CP 19
19 A B CP 90O 后续电路可利用A、B两 相的90°相位差进行四倍 频细分处理,提高分辨率。 4.2 位置检测装置
4.2位置检测装置 (3)增量式码盘的规格及分辨率 >规格 增量式码盘的规格是指码盘每转一圈发出的脉 冲数。市场上提供的规格从36线/转到10万线/转 都有。最大达1600万线(禁运)。 >分辨率a 360° X= n >选择原则 ◆伺服系统要求的分辨率; ◆考虑机械传动系统的参数。整数原则。 20
20 (3)增量式码盘的规格及分辨率 规格 分辨率α 增量式码盘的规格是指码盘每转一圈发出的脉 冲数。市场上提供的规格从 36线 / 转 到10万线 /转 都有。最大达1600万线(禁运)。 选择原则 n 360 伺服系统要求的分辨率; 考虑机械传动系统的参数。整数原则。 4.2 位置检测装置