心号与事我 §97状态头量的孩性变换 ·在线性变换下状态方程的特性 •系统转移函数阵在线性变换下是不变的 •A矩阵的对角化 •由状态方程判断系统的稳定性 新疆大学信息科学与工程学院电子系 2003.1 退出 开始
新疆大学信息科学与工程学院电子系 2003.1 §9.7 状态矢量的线性变换 •在线性变换下状态方程的特性 •系统转移函数阵在线性变换下是不变的 •A矩阵的对角化 •由状态方程判断系统的稳定性
序言 从状态变量的选择看出,同一系统可以选择不同 的状态变量,但所选每种状态变量相互之间存在着变 换关系。它可以看作同一系统在状态空间中取了不同 的基底,而状态矢量用不同基底表示时具有不同的形 式,因此,对同一系统而言,以各种形式表示的状态 矢量之间存在着线性变换关系。这种线性变换,对于 简化系统分析是很有用的。 合UDI
X 第 2 序言 页 从状态变量的选择看出,同一系统可以选择不同 的状态变量,但所选每种状态变量相互之间存在着变 换关系。它可以看作同一系统在状态空间中取了不同 的基底,而状态矢量用不同基底表示时具有不同的形 式,因此,对同一系统而言,以各种形式表示的状态 矢量之间存在着线性变换关系。这种线性变换,对于 简化系统分析是很有用的
在线性变换下状态方程的特俓 按线性空间不同基底镀换关系,设一组状变量) 与另一组状态变量之间有 Y1=p11+P122+.+P1kx 矢量形式 Y2=p211+p22乙2+.+p2k4 y=pi 线性变换 Yk=Pk1+Pk2乙2+.+PM 其中y和,为列矢量 P\k
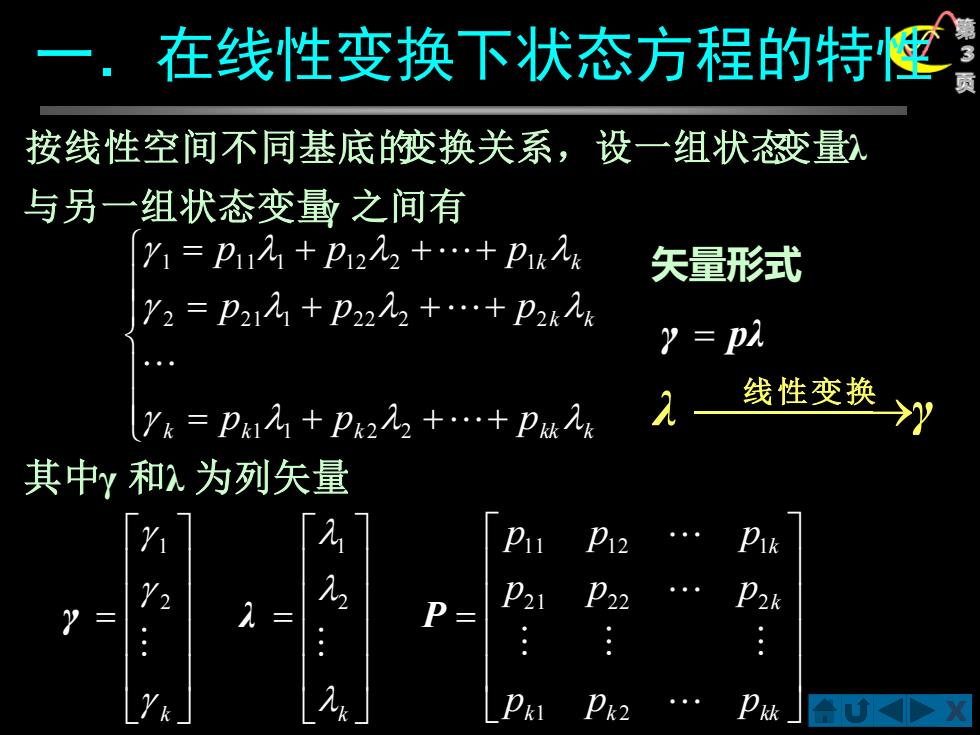
X 第 3 一.在线性变换下状态方程的特性 页 与另一组状态变量 之间有 按线性空间不同基底的变换关系,设一组状态变 量 γ λ = + + + = + + + = + + + k k k kk k k k k k p p p p p p p p p 1 1 2 2 2 2 1 1 2 2 2 2 1 1 1 1 1 2 2 1 矢量形式 γ = pλ = k 2 1 γ = k 2 1 λ = k k kk k k p p p p p p p p p 1 2 2 1 2 2 2 1 1 1 2 1 P 其中γ 和λ 为列矢量 λ ⎯⎯ ⎯→γ 线性变换
系数间的关系 设原基底下状态方程表示为 品2-eab 经变换后 P04P70:80 原矩阵系数A,B,C,D 新矩阵系数A,B,C,D 或 )()B) y()=Ca(t)+De()=CP-y()+De(t)=Cy (t)+De(t) 系数间的关系 A=PAP 题 B=PB C=CP- D=D
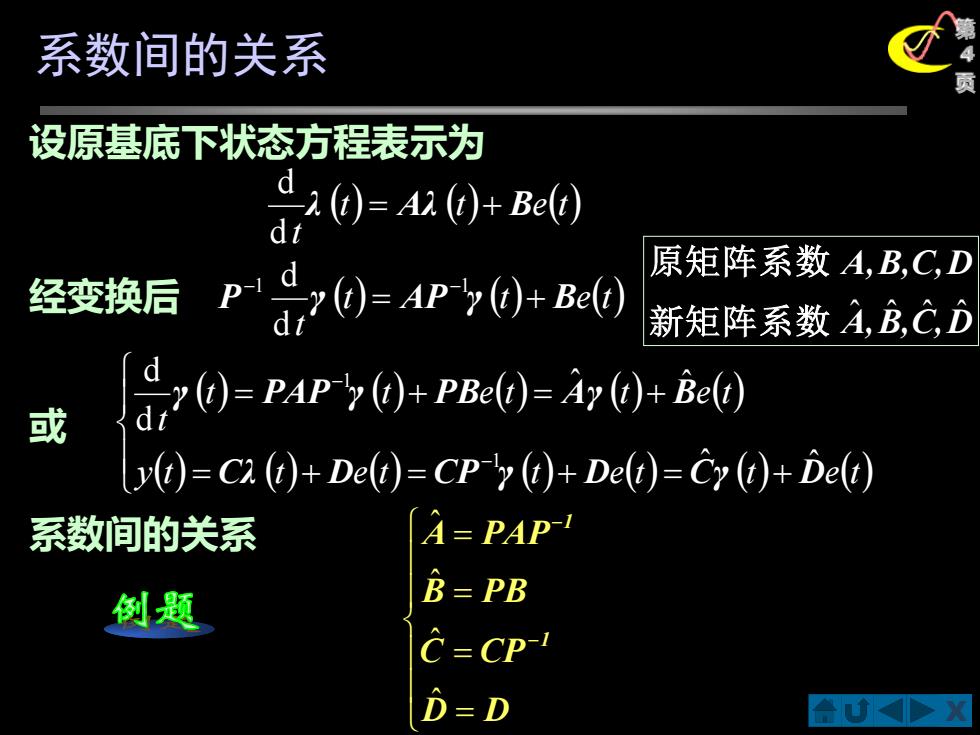
X 第 4 系数间的关系 页 设原基底下状态方程表示为 (t) (t) e(t) t λ = Aλ + B d d 经变换后 (t) (t) e(t) t P γ = AP γ + B −1 −1 d d 或 ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) = + = + = + = + = + − − y t t e t t e t t e t t t e t t e t t Cλ D CP γ D Cγ D γ PAP γ PB Aγ B ˆ ˆ ˆ ˆ d d 1 1 = = = = − − D D C CP B PB A PAP 1 1 ˆ ˆ ˆ ˆ A,B,C,D A,B,C,D ˆ ˆ ˆ ˆ 新矩阵系数 原矩阵系数 系数间的关系
二. 系统转移函数阵在线性变换下是不变的 从本质上讲状态方程式描述系统的一种方法,而 系统转移函数是描述系统的另一种方法。当状态矢量 用不同基底表示时,并不影响系统的物理本质,因此 对同一系统不同状态变量的选择,系统转移函数应是 不变的: S)=Cs-A'B+D=C(s-A'B+D证明 上式以连续系统为例说明状态矢量线性变换的特性 结论同样适用于离散系统
X 第 5 二.系统转移函数阵在线性变换下是不变的页 从本质上讲状态方程式描述系统的一种方法,而 系统转移函数是描述系统的另一种方法。当状态矢量 用不同基底表示时,并不影响系统的物理本质,因此 对同一系统不同状态变量的选择,系统转移函数应是 不变的: H( ) = C( I − A) B + D = C( I − A) B + D − − 1 1 ˆ ˆ ˆ ˆ ˆ s s s 上式以连续系统为例说明状态矢量线性变换的特性, 结论同样适用于离散系统