第七章R数字滤波器的设计方法 IR数字滤波器: 可以利用模拟滤波器设计 但相位非线性 FIR数字滤波器: 可以严格线性相位,又可任意幅度特性 因果稳定系统 可用FFT计算 但阶次比R滤波器要高得多
第七章 FIR数字滤波器的设计方法 IIR数字滤波器: 可以利用模拟滤波器设计 但相位非线性 FIR数字滤波器: 可以严格线性相位,又可任意幅度特性 因果稳定系统 可用FFT计算 但阶次比IIR滤波器要高得多
一、线性相位FIR滤波器的特点 FR滤波器的单位冲激响应: h(n)0≤n≤N-1 系统函数: N-1 H(a)=∑h(n)z" n=0 在z平面有N-1个零点 在z=0处是N-1阶极点
一、线性相位FIR滤波器的特点 FIR滤波器的单位冲激响应: h n n N ( ) 0 1 1 0 ( ) ( ) N n n H z h n z 系统函数: 在 z 平面有N –1 个零点 在 z = 0 处是N –1 阶极点
1、线性相位条件 h(n)为实序列时,其频率响应: H(e)=∑m)em=H(oeo)=±Hem)leo n=0 线性相位是指O(o)是0的线性函数 即群延时-@=:是常数 do 第一类线性相位:(0)=-⑩ 第二类线性相位:(0)=阝,-t0
h(n)为实序列时,其频率响应: 1、线性相位条件 ( ) ( ) j j H e e 即群延时 是常数 d ( ) d 0 第二类线性相位: ( ) 第一类线性相位: ( ) 1 0 ( ) ( ) N j j n n H e h n e ( ) ( ) j H e 线性相位是指 是 的线性函数
2e=水”r38 n=0 第一类线性相位:(o)=-0 ±H(e)cos(or)=∑(n)cos(on) n=0 N- ±H(e)sn(or)=∑h(n)sin(on) h(n)sin(on) 8or)- 网 n=0 N-1 h(n)cos(on) n=0 ∑h(n))sin(or)cos(om)-∑A(mcos(or)sin(onm)=0 2 Σ)sin[e-mo]-=0
( ) ( ) j j H e e 1 0 ( ) ( ) N j j n n H e h n e 第一类线性相位: ( ) ( ) j j H e e 1 0 ( ) cos cos N j n H e h n n 1 0 ( ) sin sin N j n H e h n n 1 0 1 0 sin sin cos cos N n N n h n n tg h n n 1 1 0 0 sin cos cos sin 0 N N n n h n n h n n 1 0 sin 0 N n h n n
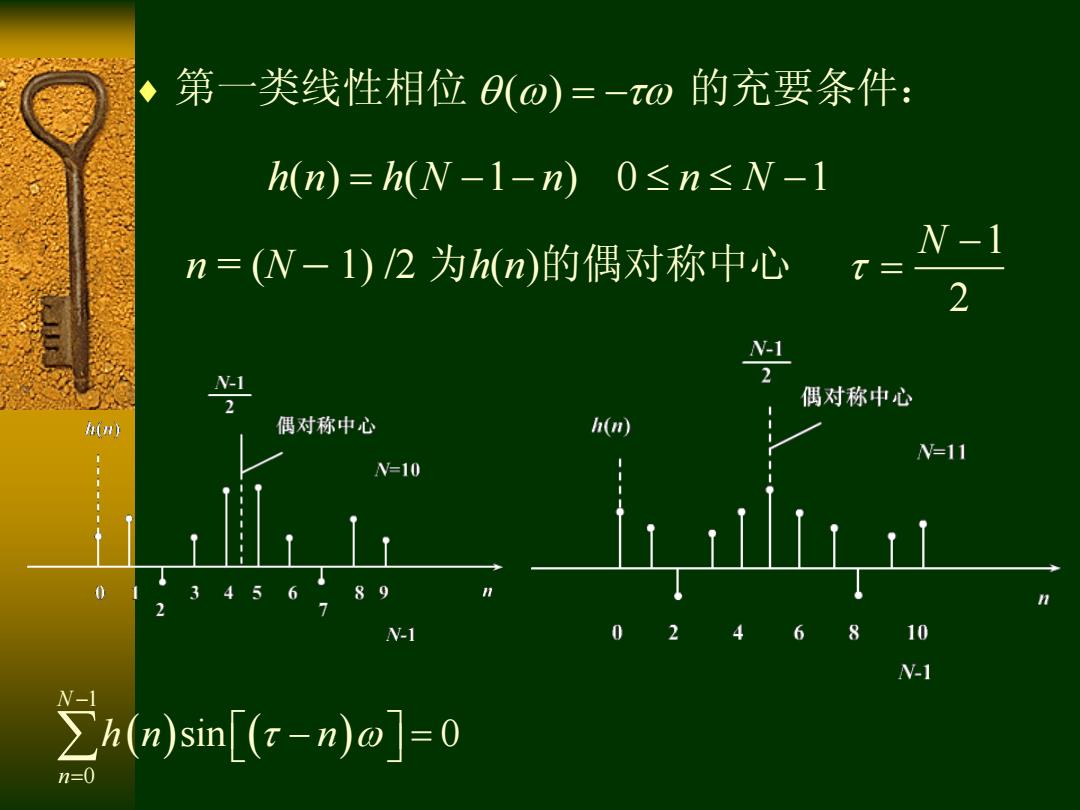
◆第一类线性相位0(o)=-x0的充要条件: h(n)=h(N-1-n0≤n≤N-1 n=(N-1)/2为h(n)的偶对称中心 N-1 t= 2 N-1 N-1 偶对称中心 h(n) 偶对称中心 h(n) N=11 W=10 0 45 89 N-1 2 6 8 10 N-1 ∑n(n)sin[(c-n)o]=0
第一类线性相位 ( ) 的充要条件: h n h N n n N ( ) ( 1 ) 0 1 1 2 N n = (N – 1) /2 为h(n)的偶对称中心 1 0 sin 0 N n h n n