5.1前馈控制系统的特点 前馈控制系统的特点 (1) 按干扰作用的大小进行控制一 提前,控制及时 控制的依据 检测的信号 控制作用的 发生时间 反馈控制 被控变量的偏差 被控变量 偏差出现后 前馈控制 干扰量的大小 干扰量 偏差出现前
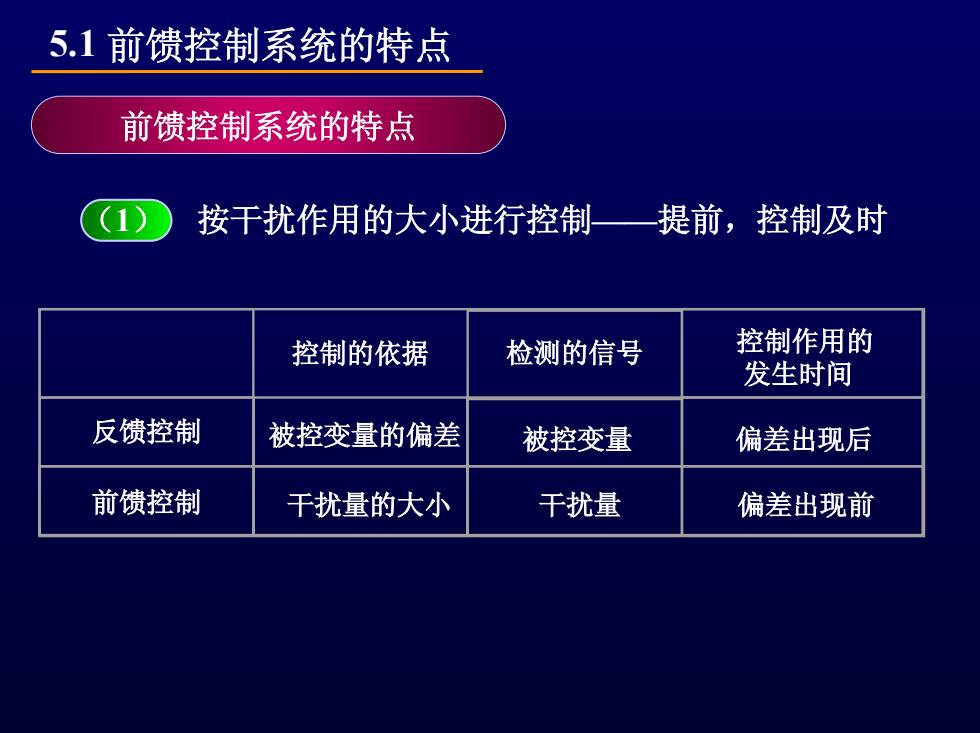
5.1 前馈控制系统的特点 前馈控制系统的特点 (1) 按干扰作用的大小进行控制——提前,控制及时 控制的依据 检测的信号 控制作用的 发生时间 反馈控制 前馈控制 被控变量的偏差 干扰量的大小 被控变量 干扰量 偏差出现后 偏差出现前
5.1前馈控制系统的特点 前馈控制属于开环控制 对象 GPD(s) Gr(s) Gpc(s) 图53系统方块图 开环控制,控制效果不能通过反馈验证,因此对控制器设计 的要求比较严格
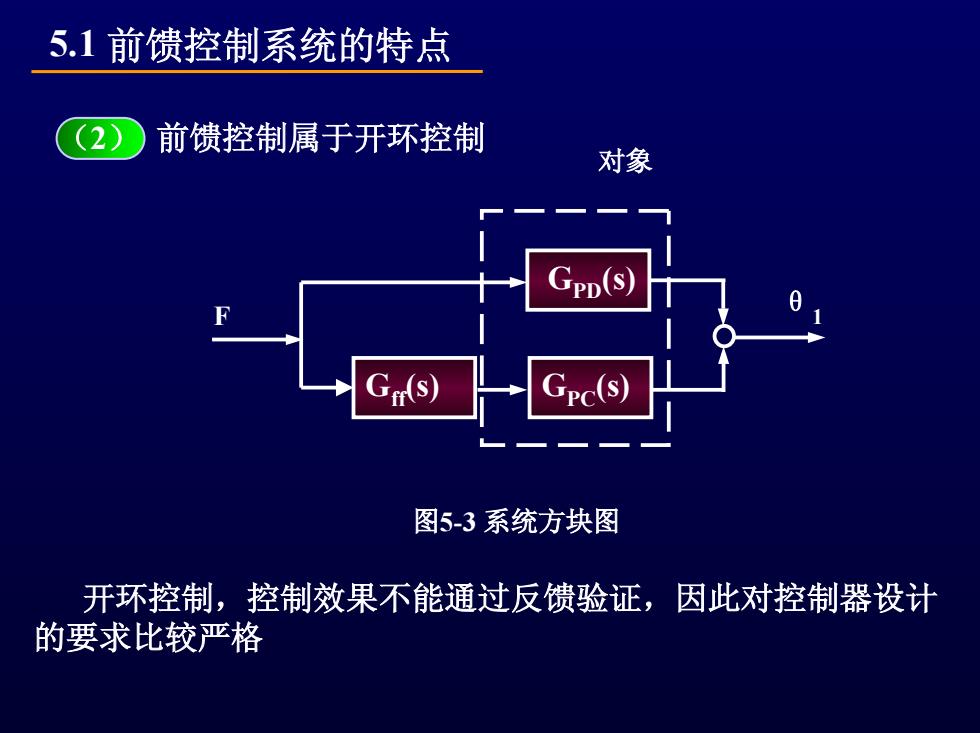
5.1 前馈控制系统的特点 (2) 前馈控制属于开环控制 对象 GPD(s) GPC G (s) ff(s) F θ1 图5-3 系统方块图 开环控制,控制效果不能通过反馈验证,因此对控制器设计 的要求比较严格
5.1前馈控制系统的特点 是一种根据对象特性设计的“专用”控制器 GPD(s) Gr(s) Gpc(s) 图53系统方块图 G(s)= Gpp(S) Gpc(s) 不象反馈控制通用PD算法,前馈控制算法依对象不 同而不同。前馈控制器设计依据“扰动补偿理论
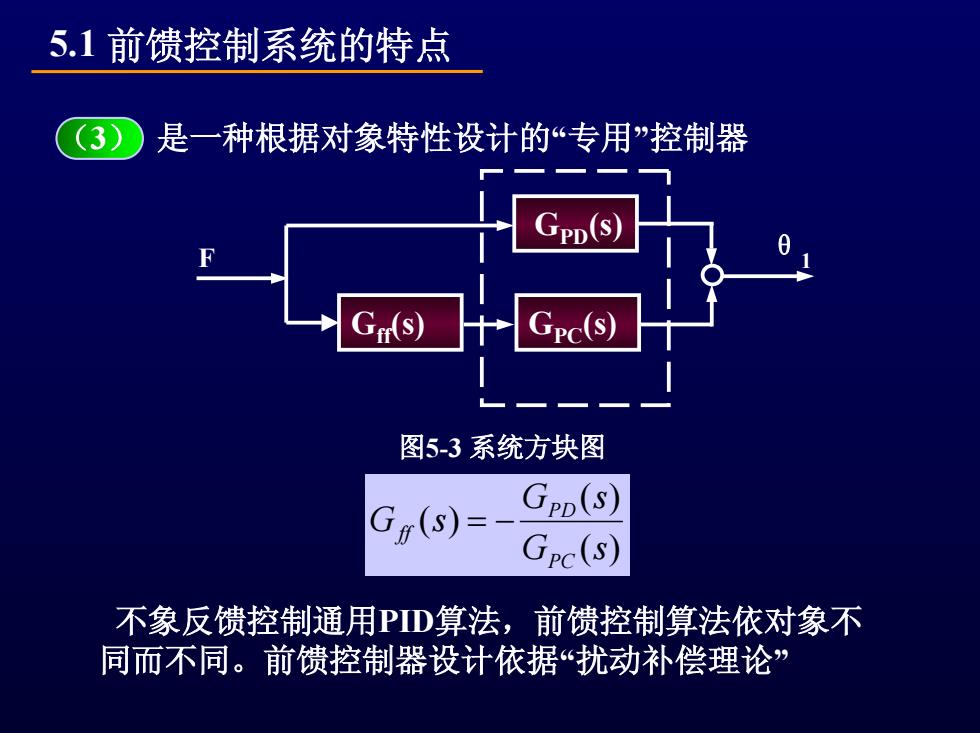
5.1 前馈控制系统的特点 (3) 是一种根据对象特性设计的“专用”控制器 GPD(s) GPC G (s) ff(s) F θ1 图5-3 系统方块图 ( ) ( ) ( ) G s G s G s PCPD ff = − 不象反馈控制通用PID算法,前馈控制算法依对象不 同而不同。前馈控制器设计依据“扰动补偿理论
5.1前馈控制系统的特点 (4) 种前馈作用只能克服一种干扰 缺点
5.1 前馈控制系统的特点 前馈控制系统的特点 (4) 一种前馈作用只能克服一种干扰 一种前馈作用只能克服一种干扰 缺点
第5章 前馈控制系统 5.1 前馈控制系统的特点 5.2前馈控制系统的几种主要结构形式 5.3前馈控制规律的实施 5.4前馈控制系统的应用 5.5前馈控制系统的参数整定 5.6多变量前馈控制 实验: 前馈控制系统实验
第5章 前馈控制系统 5.1 前馈控制系统的特点 前馈控制系统的特点 5.2 前馈控制系统的几种主要结构形式 前馈控制系统的几种主要结构形式 5.3 前馈控制规律的实施 前馈控制规律的实施 5.4 前馈控制系统的应用 前馈控制系统的应用 5.5 前馈控制系统的参数整定 前馈控制系统的参数整定 5.6 多变量前馈控制 多变量前馈控制 实验:前馈控制系统实验 实验:前馈控制系统实验