讲新课 课程名称 过程控制工程 课 型 (前馈控制系统的特点 及单纯的前馈控制系统 结构) 教师姓名 授课学时 1学时(50分钟) 5. 前馈控制系统 5.1前控制系统的特点 教学内容 5.2前馈控制系统的几种主要结构形式 52.1单纯的前馈控制系统 通过本节内容的学习,使同学掌握前馈控制系统的特点,了解单纯前 教学目的 馈控制系统的结构形式。 前馈控制系统的特点: 教学重点 单纯的前馈控制系统 难点:前馈控制系统的特点 教学难点 策略 及相应的 通过举例说明来分别阐述前馈控制系统的几个特点。 教学策略 探究式讲授法、互动法(提问)、演示法(多媒体)、课堂讨论法 教学方法 (教师启发、引导学生发言、教师评价并总结包括自问自答) 教学手段 板书及多媒体有机结合
课程名称 过程控制工程 课 型 讲新课 (前馈控制系统的特点 及单纯的前馈控制系统 结构) 教师姓名 授课学时 1 学时(50 分钟) 教学内容 5.前馈控制系统 5.1 前馈控制系统的特点 5.2 前馈控制系统的几种主要结构形式 5.2.1 单纯的前馈控制系统 教学目的 通过本节内容的学习,使同学掌握前馈控制系统的特点,了解单纯前 馈控制系统的结构形式。 教学重点 前馈控制系统的特点; 单纯的前馈控制系统。 教学难点 及相应的 教学策略 难点: 前馈控制系统的特点 策略: 通过举例说明来分别阐述前馈控制系统的几个特点。 教学方法 探究式讲授法、互动法(提问)、演示法(多媒体)、课堂讨论法 (教师启发、引导学生发言、教师评价并总结包括自问自答) 教学手段 板书及多媒体有机结合

时间 教学过程 教学方法、 分配 手段 -1
- 1 - 时间 分配 教学过程 教学方法、 手段
5。前墙控制系绕 5.1前馈控制系统的特点 。亡羊补牢】 防患于未然 反馈 前馈 0 0 偏差 干扰 当对象呈现大延迟和多干扰特性时,反馈控制难于控制,原因如下 必然存在”差”,控制不及时: 换 (2) 不能事先规定它的输出量,尝试法是一种原始的控制方法。 热 不变性原理在这个发展中得到充分利用。 不变性原理是指控制系统的被控量与扰动最绝对无关,或者在一定准确度下无 关,也即被调量基本独立或者完全独立。 (1)绝对不变性:(2)误差不变性:(3)稳态不变性:(4)选择不变性 基于不变性原理组成的自动控制系统称为前馈控制系统,它实现了系统对全部干 制 扰或部分干扰的不变性,实质上是一种按扰动进行补偿的开环系统。 例子:换热器温度控制 探究式 Fs 讲授法 分 (a)反馈控制方案 用加热载体的流量控制被加热流体的温度一滞后控制 换热器进料最为出口温度的主要干扰量,可通过流最测最,通过前馈装置, 控制阀门,即用蒸汽变化补偿由于进料流量变化对出口温度的影响。 (b)前馈控制方案 Fs G 01 按干扰量的变化来提前补偿其对被控变量的影响→超前控制
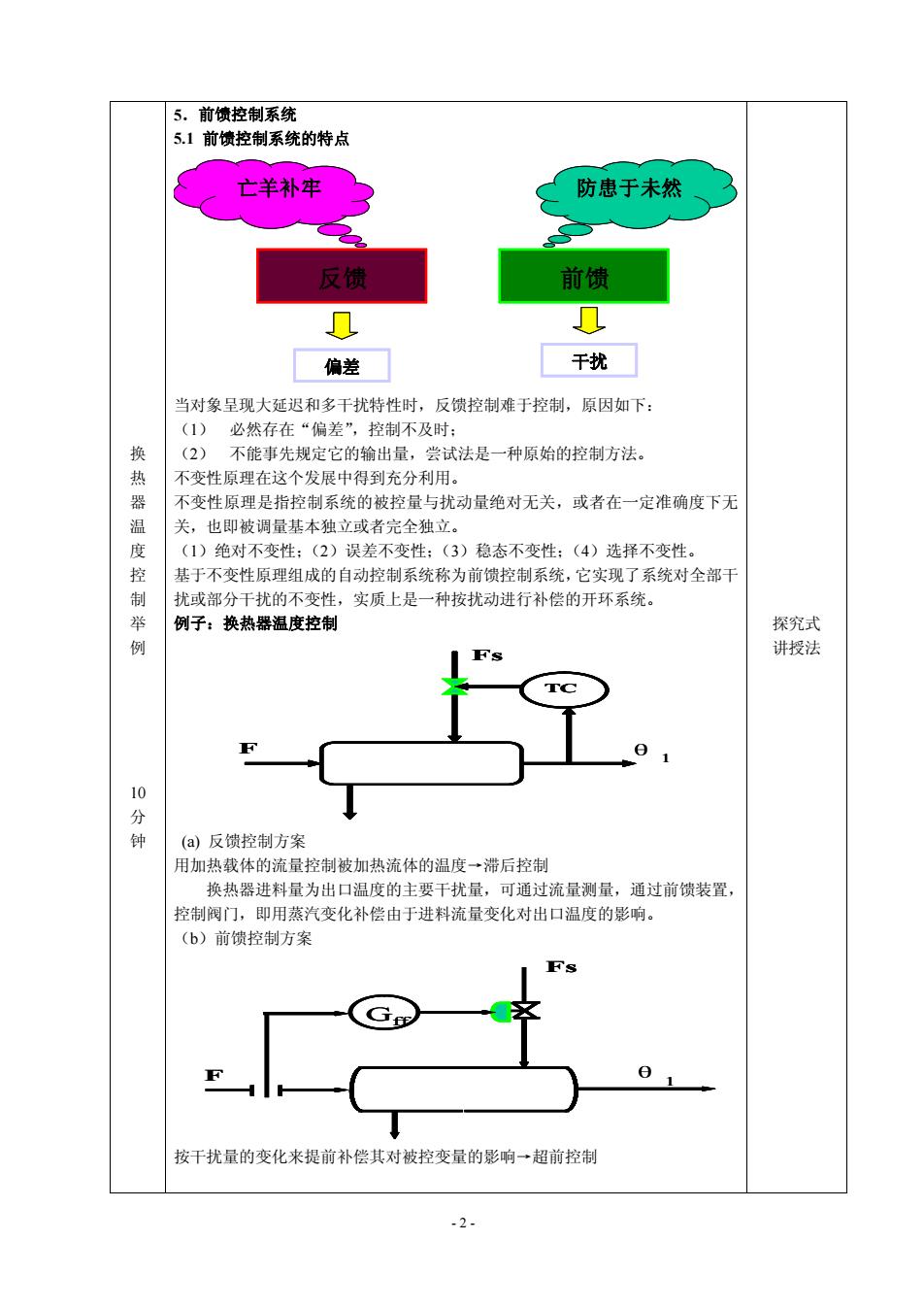
- 2 - 换 热 器 温 度 控 制 举 例 10 分 钟 5.前馈控制系统 5.1 前馈控制系统的特点 反馈 亡羊补牢 前馈 防患于未然 偏差 干扰 反馈 亡羊补牢 前馈 防患于未然 偏差 干扰 当对象呈现大延迟和多干扰特性时,反馈控制难于控制,原因如下: (1) 必然存在“偏差”,控制不及时; (2) 不能事先规定它的输出量,尝试法是一种原始的控制方法。 不变性原理在这个发展中得到充分利用。 不变性原理是指控制系统的被控量与扰动量绝对无关,或者在一定准确度下无 关,也即被调量基本独立或者完全独立。 (1)绝对不变性;(2)误差不变性;(3)稳态不变性;(4)选择不变性。 基于不变性原理组成的自动控制系统称为前馈控制系统,它实现了系统对全部干 扰或部分干扰的不变性,实质上是一种按扰动进行补偿的开环系统。 例子:换热器温度控制 TC F Fs θ1 (a) 反馈控制方案 用加热载体的流量控制被加热流体的温度→滞后控制 换热器进料量为出口温度的主要干扰量,可通过流量测量,通过前馈装置, 控制阀门,即用蒸汽变化补偿由于进料流量变化对出口温度的影响。 (b)前馈控制方案 Gff F Fs θ1 Gff F Fs θ1 按干扰量的变化来提前补偿其对被控变量的影响→超前控制 探究式 讲授法
前 控制 前债控制系统的补偿过程 前馈控制系统的特点: (1)按干扰作用的大小进行控制一提前,控制及时 控制的依据 检测的信号 资周的购 点 反债控制 被控变量的偏差 被控变量 偏差出现后 前债控制 干扰量的大小 干扰量 偏差出现前 15 (2)前馈控制属于开环控制 对象 GPD(s) 多媒体 F 演示法 Ga(s) Gpc(s) 图53系统方块图 开环控制,控制效果不能通过反馈验证,因此对控制器设计的要求比较严格
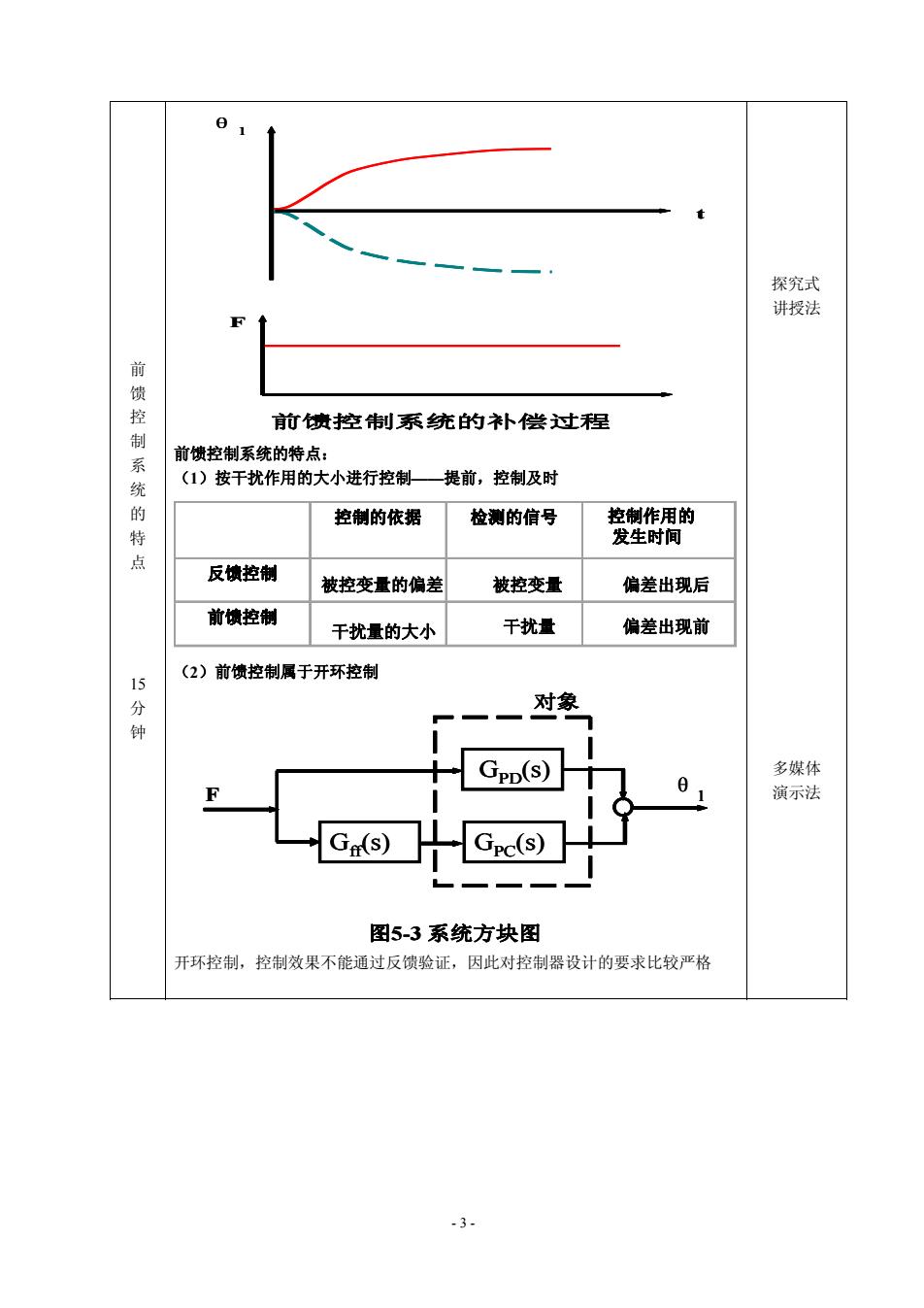
- 3 - 前 馈 控 制 系 统 的 特 点 15 分 钟 θ1 t F 前馈控制系统的补偿过程 F 前馈控制系统的补偿过程 前馈控制系统的特点: (1)按干扰作用的大小进行控制——提前,控制及时 控制的依据 检测的信号 控制作用的 发生时间 反馈控制 前馈控制 被控变量的偏差 干扰量的大小 被控变量 干扰量 偏差出现后 偏差出现前 控制的依据 检测的信号 控制作用的 发生时间 反馈控制 前馈控制 控制的依据 检测的信号 控制作用的 发生时间 反馈控制 前馈控制 控制的依据 检测的信号 控制作用的 发生时间 反馈控制 前馈控制 被控变量的偏差 干扰量的大小 被控变量 干扰量 偏差出现后 偏差出现前 (2)前馈控制属于开环控制 GPD(s) GPC G (s) ff(s) F θ1 图5-3 系统方块图 对象 GPD(s) GPC G (s) ff(s) F θ1 图5-3 系统方块图 GPD(s) GPC G (s) ff(s) F θ1 图5-3 系统方块图 对象 开环控制,控制效果不能通过反馈验证,因此对控制器设计的要求比较严格 探究式 讲授法 多媒体 演示法
(3)是一种根据对象特性设计的“专用”控制器 GPD(s) 制系统的 Ga(s) Gpc(s) 板书、 G)= Gpp(s) 互动法 Gpd(s) 不像反馈控制通用PD算法,前馈控制算法依对象不同而不同。前馈控制器 设计依据“扰动补偿理论” 钟 (4)一种前馈作用只能克服一种干扰 (5)前馈控制不改变原来系统的稳定性 这给前馈的应用带来实际问题,反馈 可使开环不稳定的系统变得稳定。 5.2前馈控制系统的几种主要结构形式 5.2.1单纯的前愤控制系统 ·动态前馈控制 实现动态干扰补偿 Gn(s)=-Gra(s) Grc(s) 单 ●静态前馈控制 实现稳定工况下的干扰补偿(要求没有动态那么高) 前馈 Gn(s)=K 例子1: 蒸汽 蒸汽量D 液位L 给水 流量F 静态前馈控制系统 图5-4锅炉汽包三冲量控制 4
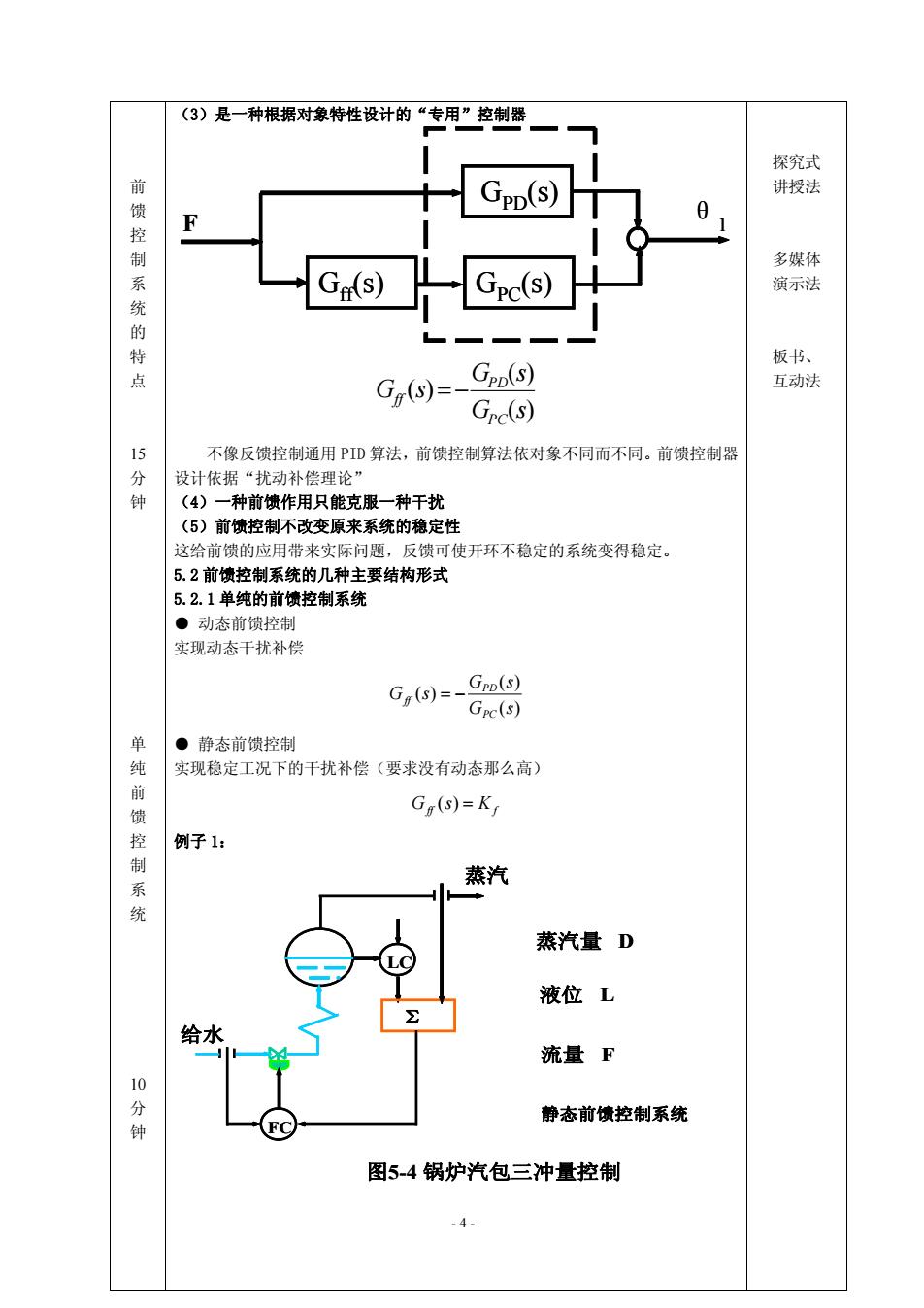
- 4 - 前 馈 控 制 系 统 的 特 点 15 分 钟 单 纯 前 馈 控 制 系 统 10 分 钟 (3)是一种根据对象特性设计的“专用”控制器 GPD(s) GPC G (s) ff(s) F θ1 GPD(s) GPC G (s) ff(s) F θ1 ( ) ( ) ( ) G s G s G s PC PD ff =− 不像反馈控制通用 PID 算法,前馈控制算法依对象不同而不同。前馈控制器 设计依据“扰动补偿理论” (4)一种前馈作用只能克服一种干扰 (5)前馈控制不改变原来系统的稳定性 这给前馈的应用带来实际问题,反馈可使开环不稳定的系统变得稳定。 5.2 前馈控制系统的几种主要结构形式 5.2.1 单纯的前馈控制系统 ● 动态前馈控制 实现动态干扰补偿 ( ) ( ) ( ) G s G s G s PC PD ff = − ● 静态前馈控制 实现稳定工况下的干扰补偿(要求没有动态那么高) ff K f G (s) = 例子 1: 图5-4 锅炉汽包三冲量控制 Σ FC LC 蒸汽量 D 液位 L 流量 F 静态前馈控制系统 给水 蒸汽 图5-4 锅炉汽包三冲量控制 Σ FC LC 蒸汽量 D 液位 L 流量 F 静态前馈控制系统 给水 蒸汽 探究式 讲授法 多媒体 演示法 板书、 互动法