第二节传动机构设计 机 (三)滚珠丝杠副轴向间隙的调整和施加预紧力的方法 滚珠丝杠副的轴向间隙是承载时在滚珠与滚道型面接触点的弹性变形 所引起的螺母位移量和螺母原有间隙的总和。通常采用双螺母预紧的 体化技术基础第 方法,把弹性变形控制在最小限度内,以减小或消除轴向间隙,并可 以提高滚珠丝杠副的刚度。 单螺母式滚珠丝杠副的轴向间隙达0.05mm。 双螺母预紧消除轴向间隙时应注意以下两点: 1)预紧力大小必须合适,预紧力应不超过最大轴向负载的1/3。 章机械系统设计 2)要特别注意减小丝杠安装部分和驱动部分的间隙
(三)滚珠丝杠副轴向间隙的调整和施加预紧力的方法 ✓ 滚珠丝杠副的轴向间隙是承载时在滚珠与滚道型面接触点的弹性变形 所引起的螺母位移量和螺母原有间隙的总和。通常采用双螺母预紧的 方法,把弹性变形控制在最小限度内,以减小或消除轴向间隙,并可 以提高滚珠丝杠副的刚度。 ✓ 单螺母式滚珠丝杠副的轴向间隙达0.05mm。 ✓ 双螺母预紧消除轴向间隙时应注意以下两点: 1)预紧力大小必须合适,预紧力应不超过最大轴向负载的1/3。 2)要特别注意减小丝杠安装部分和驱动部分的间隙。 第二节 传动机构设计

第二节传动机构设计 常用的双螺母消除轴向间隙的结构形式有三种(1) (1)垫片调隙式(图29) 机电一体化技术基础第二章机械系统设计 图2-9垫片调隙式滚珠丝杠副 1、2-单螺母3-螺母座4-调整垫片 该形式结构紧凑,工作可靠,调整方便,应用广,但不很准 确,并且当滚道磨损时不能随意调整,除非更换垫圈。故适 用于一般精度的传动机构
常用的双螺母消除轴向间隙的结构形式有三种(1) ❖ (1)垫片调隙式(图2-9) ❖ 该形式结构紧凑,工作可靠,调整方便,应用广,但不很准 确,并且当滚道磨损时不能随意调整,除非更换垫圈。故适 用于一般精度的传动机构 第二节 传动机构设计 1 2 3 4 图2-9双螺母垫片调隙式结构 1、2-单螺母 3-螺母座 4-调整垫片 图2-9垫片调隙式滚珠丝杠副 1、2-单螺母 3-螺母座 4-调整垫片
第二节传动机构设计 常用的双螺母消除轴向间隙的结构形式有三种(2) (2)螺纹调隙式(图2-10) 该形式结构紧凑、工作可靠、调整方便,缺点是不很精确。 电一体化技术基础第二章机械系统设计 2 3 图2-10双螺母螺纹调隙式结构 1、2-单螺母3-平键4-调整螺母
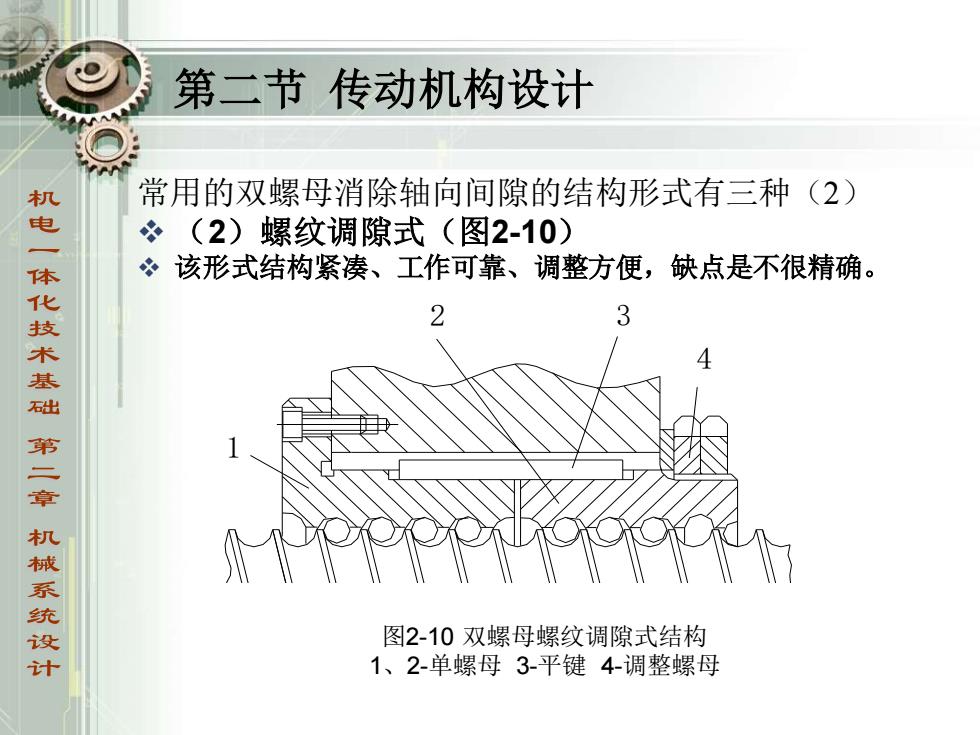
常用的双螺母消除轴向间隙的结构形式有三种(2) ❖ (2)螺纹调隙式(图2-10) ❖ 该形式结构紧凑、工作可靠、调整方便,缺点是不很精确。 第二节 传动机构设计 图7-19 双螺母螺纹调隙式结构 1、2-单螺母 3-平键 4-调整螺母 1 2 3 4 图2-10 双螺母螺纹调隙式结构 1、2-单螺母 3-平键 4-调整螺母
第二节传动机构设计 机 常用的双螺母消除轴向间隙的结构形式有三种(3) 的 (3)齿差调隙式(图2-11) 在两个螺母的凸缘上个制有圆柱外齿轮(齿数为z1, 技术基础 z2,且z2一21=1)分别与内齿圈啮合,内齿圈用螺钉 或定位销固定在套简上。当两个螺母按同方向转过一 个齿时,所产生的相对轴向位移为 第 122 机 式中,p为导程。若z1=99,z2=100,p=6mm,则 统设计 △s=0.6μm。可见,该形式的调整精度很高,工作可 靠,但结构复杂,加工和装配工艺性能较差
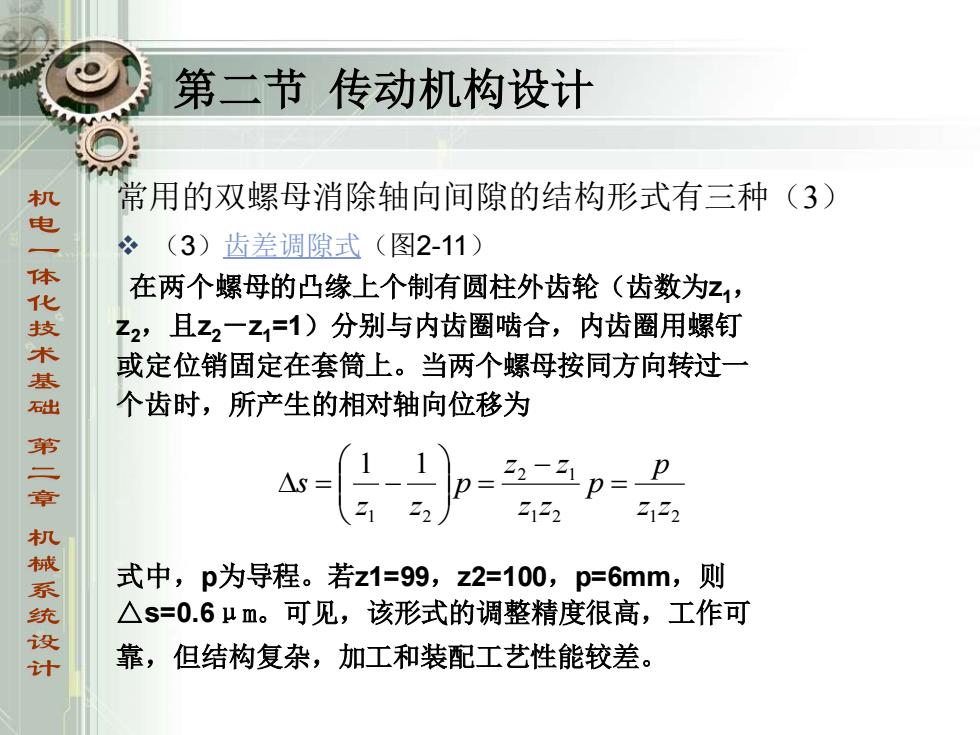
常用的双螺母消除轴向间隙的结构形式有三种(3) ❖ (3)齿差调隙式(图2-11) 在两个螺母的凸缘上个制有圆柱外齿轮(齿数为z1, z2,且z2-z1=1)分别与内齿圈啮合,内齿圈用螺钉 或定位销固定在套筒上。当两个螺母按同方向转过一 个齿时,所产生的相对轴向位移为 式中,p为导程。若z1=99,z2=100,p=6mm,则 △s=0.6μm。可见,该形式的调整精度很高,工作可 靠,但结构复杂,加工和装配工艺性能较差。 第二节 传动机构设计 1 2 1 2 2 1 1 2 1 1 z z p p z z z z p z z s = − = = −

第二节传动机构设计 1.主要尺寸 滚珠丝杠副的主要尺寸如图2-12所示,图中 电一体化技术基础第二章机械系统设计
❖1.主要尺寸 ❖ 滚珠丝杠副的主要尺寸如图2-12所示,图中 第二节 传动机构设计