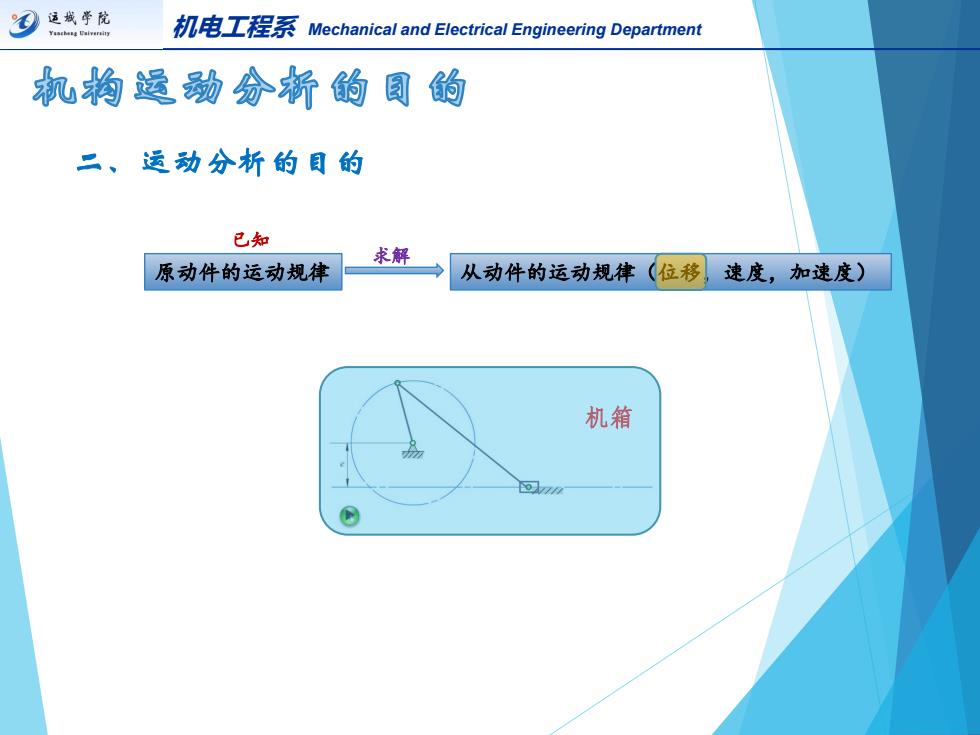
习送我华龙 机电T程系Mechanical and Electrical Engineering Department 机钩运动分析的圆的 二、运动分析的目的 已知 求解 原动件的运动规律 从动件的运动规律(位移,速度,加速度) 机箱 ozn
机电工程系 Mechanical and Electrical Engineering Department 二、运动分析的目的 原动件的运动规律 求解 从动件的运动规律(位移,速度,加速度) 已知 机箱
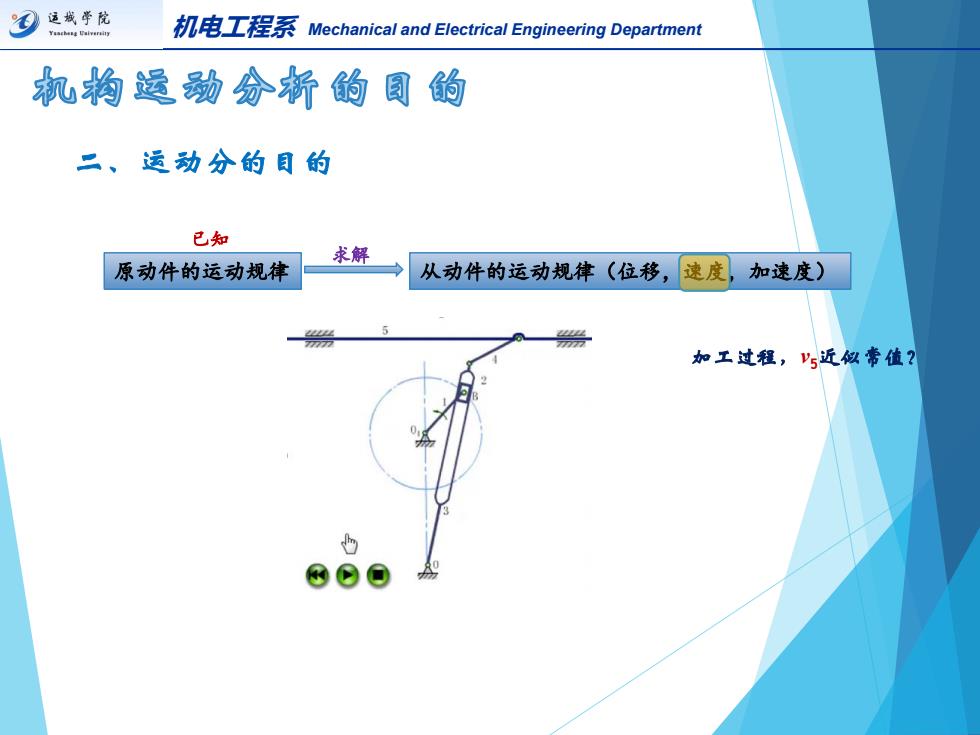
习送线年院 了achang Laiver4 机电工程系 Mechanical and Electrical Engineering Department 机构运动分析的圆的 二、运动分的目的 已知 求解 原动件的运动规律 从动件的运动规律(位移,速度,加速度) 加工过程,V5近似常值? 山 @⊙0
机电工程系 Mechanical and Electrical Engineering Department 二、运动分的目的 原动件的运动规律 求解 从动件的运动规律(位移,速度,加速度) 已知 加工过程,v5近似常值?
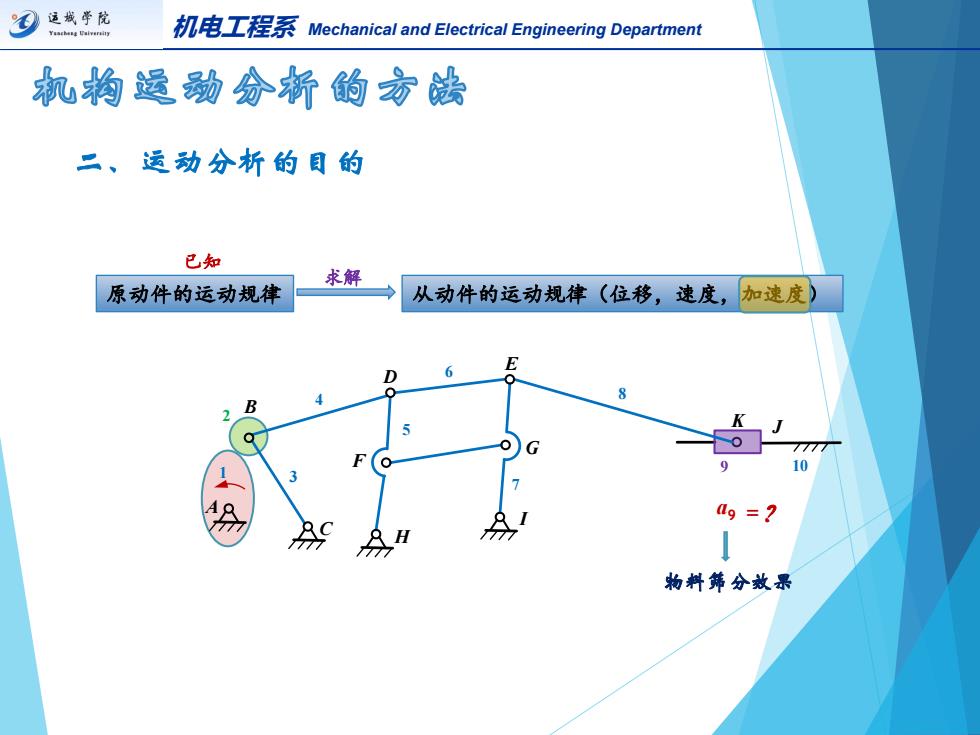
习送我华院 机电T程系Mechanical and Electrical Engineering Department 机钩运动分析的方, 二、运动分析的目的 已知 求解 原动件的运动规律 从动件的运动规律(位移,速度,加速度 D B 4g=2 物料韩分效果
机电工程系 Mechanical and Electrical Engineering Department 二、运动分析的目的 原动件的运动规律 求解 从动件的运动规律(位移,速度,加速度) 已知 E A B C D F G H I K J 8 9 10 7 5 6 4 2 1 3 物料筛分效果 a9 =?
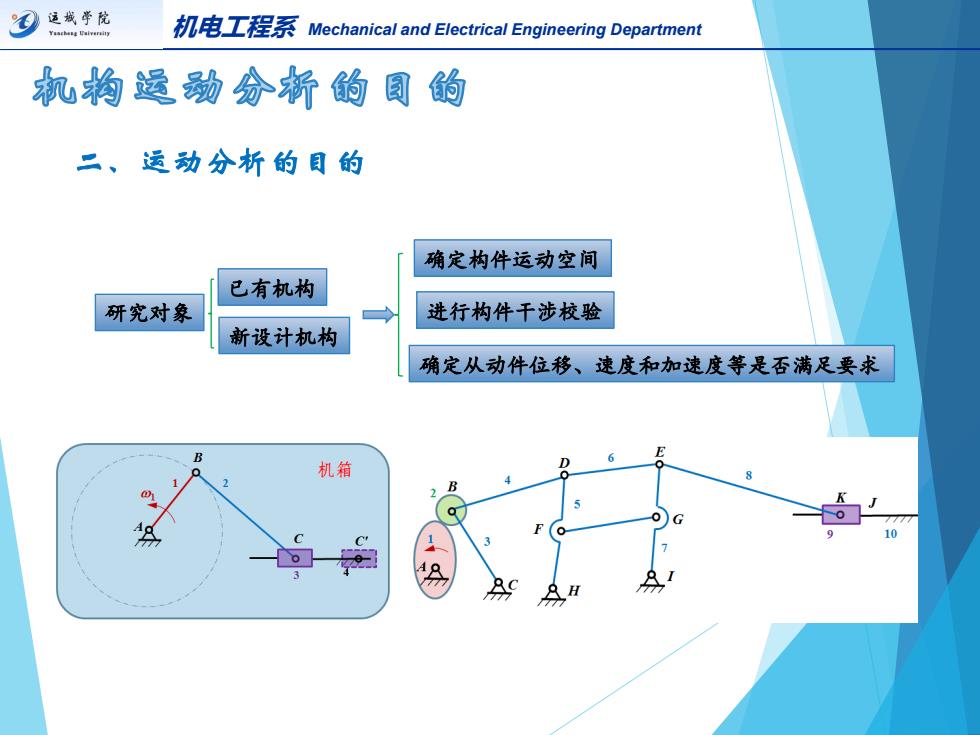
习送线乎院 了achang Laiver4 机电T程系Mechanical and Electrical Engineering Department 机构运动分析的圆的 二、运动分析的目的 确定构件运动空间 已有机构 研究对象 进行构件干涉校验 新设计机构 确定从动件位移、速度和加速度等是否满足要求 机箱
机电工程系 Mechanical and Electrical Engineering Department 二、运动分析的目的 研究对象 已有机构 新设计机构 确定构件运动空间 进行构件干涉校验 确定从动件位移、速度和加速度等是否满足要求
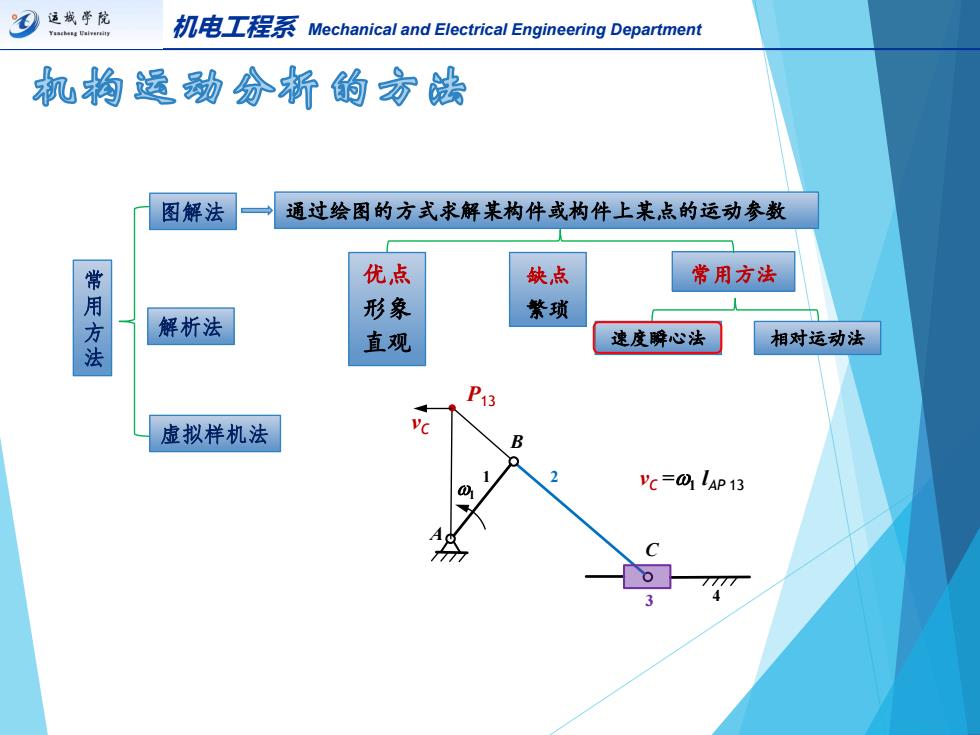
幻通线学陀 机电T程系Mechanical and Electrical Engineering Department 机钩运动分祈的方齿 图解法 通过绘图的方式求解某构件或构件上某,点的运动参数 优点 缺点 常用方法 常用方法 解析法 形象 繁琐 直观 速度瞬心法 相对运动法 ?3 虚拟样机法 B Yc=@LAP13
机电工程系 Mechanical and Electrical Engineering Department 缺点 繁琐 常 常用方法 用 方 法 图解法 解析法 虚拟样机法 通过绘图的方式求解某构件或构件上某点的运动参数 优点 形象 直观 速度瞬心法 相对运动法 A B C 1 2 3 4 w1 vC P13 vC =w1 lAP 13