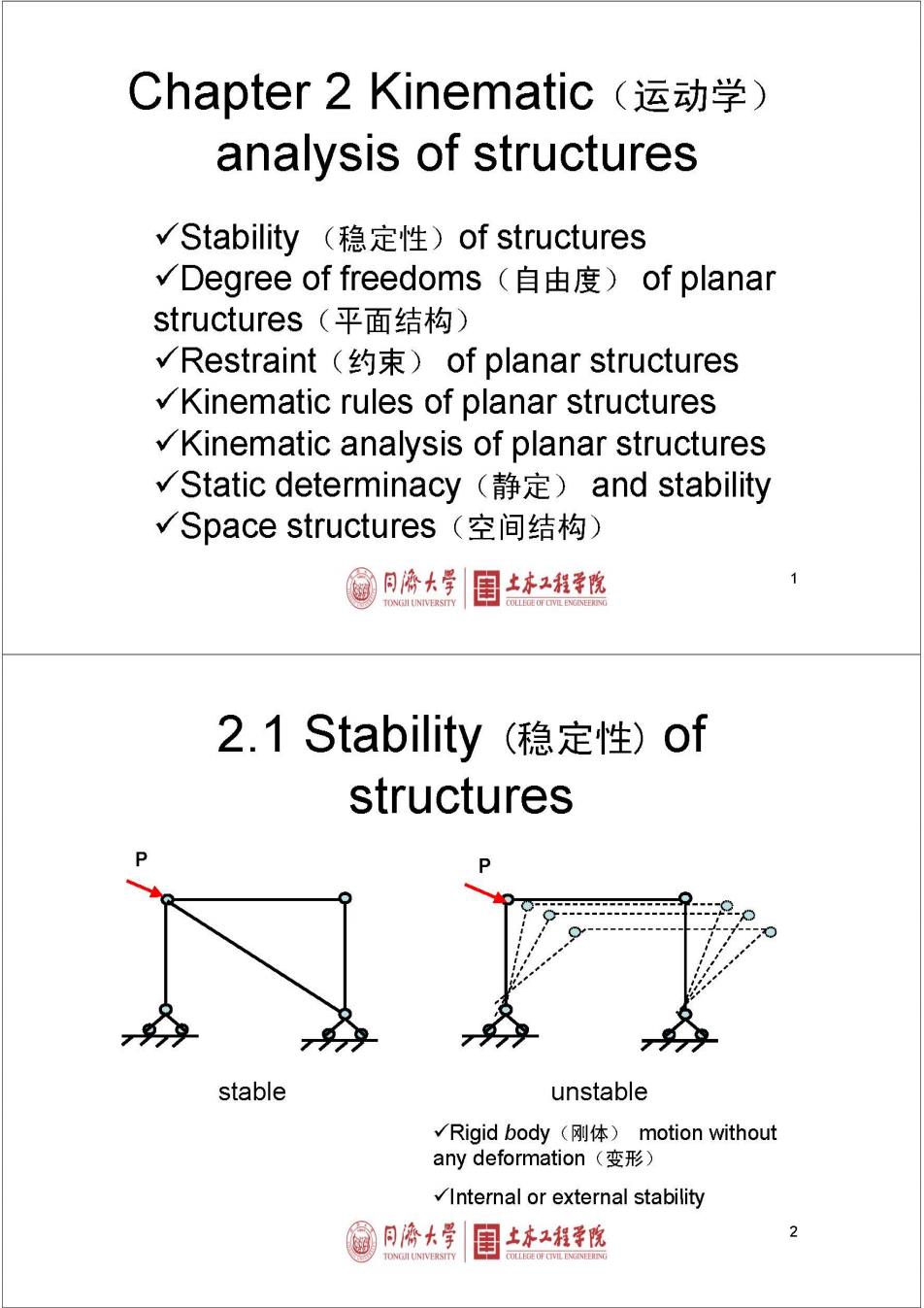
Chapter2 Kinematic(运动学) analysis of structures √Stability(稳定性)of structures √Degree of freedoms(自由度)of planar structures(平面结构) √Restraint(约束)of planar structures Kinematic rules of planar structures Kinematic analysis of planar structures √Static determinacy(静定)and stability √Space structures(空间结构) 同僑大学 土本2程学院 2.1 Stability(稳定性)of structures stable unstable √Rigid body(刚体)motion without any deformation(变形) Internal or external stability 同语大学 土亦1程学院 2
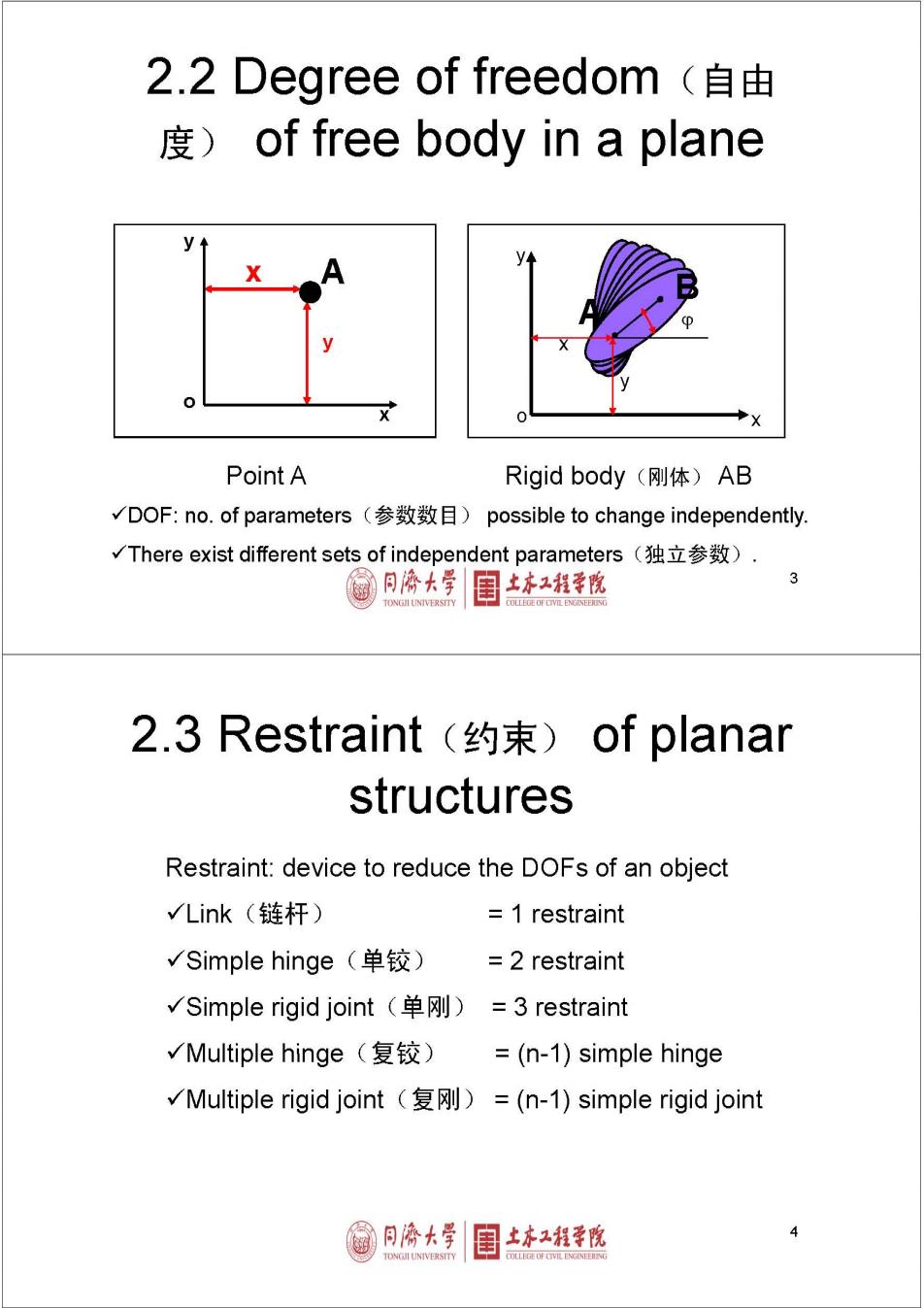
2.2 Degree of freedom(自由 of free body in a plane 0 Point A Rigid body(刚体)AB √DOF:no.of parameters(参数数目)possible to change independently. √There exist different sets of independent parameters(独立参数), 同榜大学 土水2程学院 TONGII UNIVERSIT 2.3 Restraint(约束)of planar structures Restraint:device to reduce the DOFs of an object √Link(链杆) =1 restraint √Simple hinge(单铰) =2 restraint √Simple rigid joint(单刚)=3 restraint √Multiple hinge(复铰) =(n-1)simple hinge √Multiple rigid joint(复刚)=(n-1)simple rigid joint 同榜大学 土本工程学院 g TONGJI UNIVERSITY
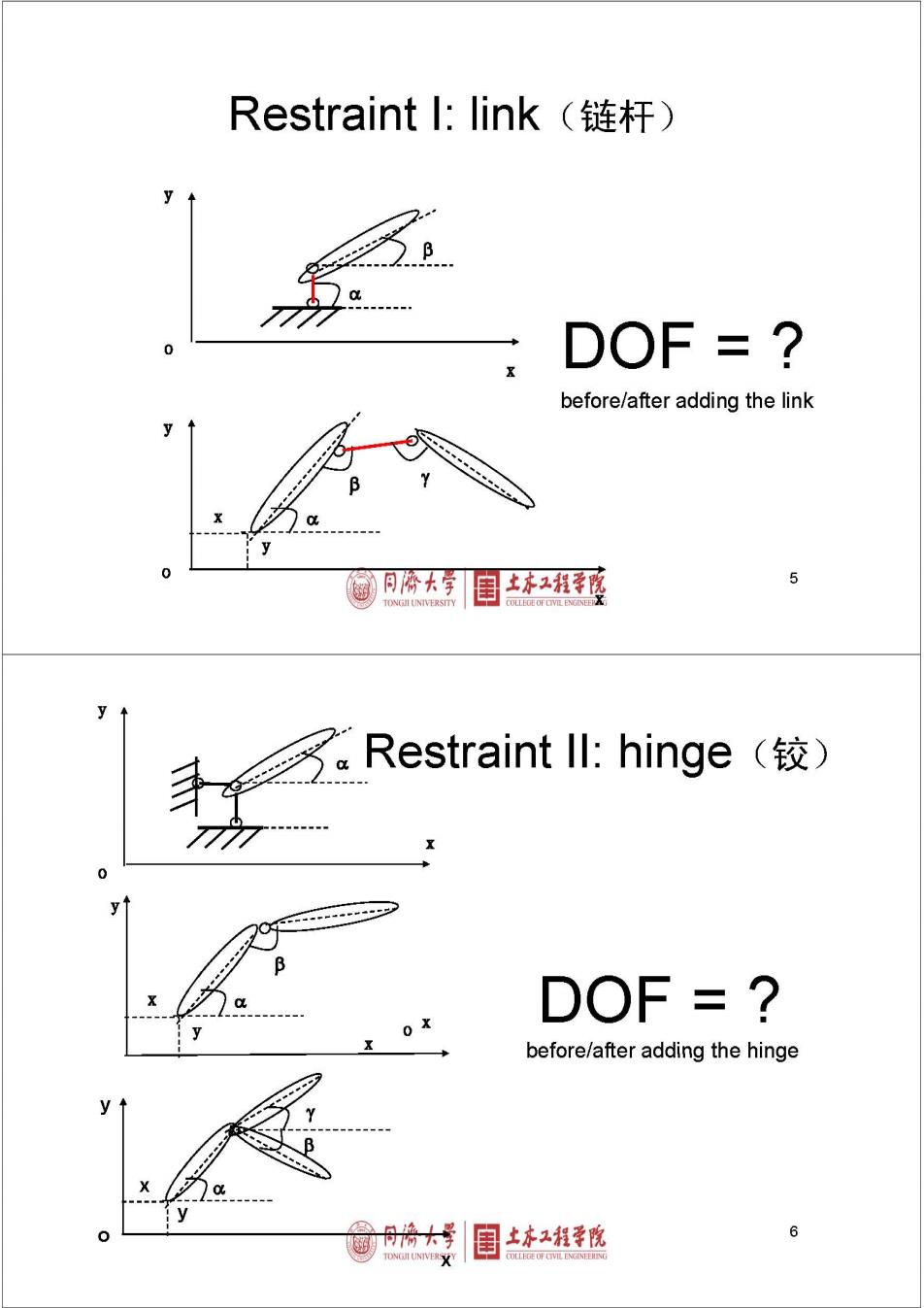
Restraint l:link(链杆) y 0 DOF = before/after adding the link 0 细)同份大学 土本2程孕魔 6 TONGII UNIVERSITY COLLEGE OF CIVIL ENGINEEP a Restraint ll:hinge 0 y B DOF = ox before/after adding the hinge 0 土亦1程学院 6 TONGI UNIVER
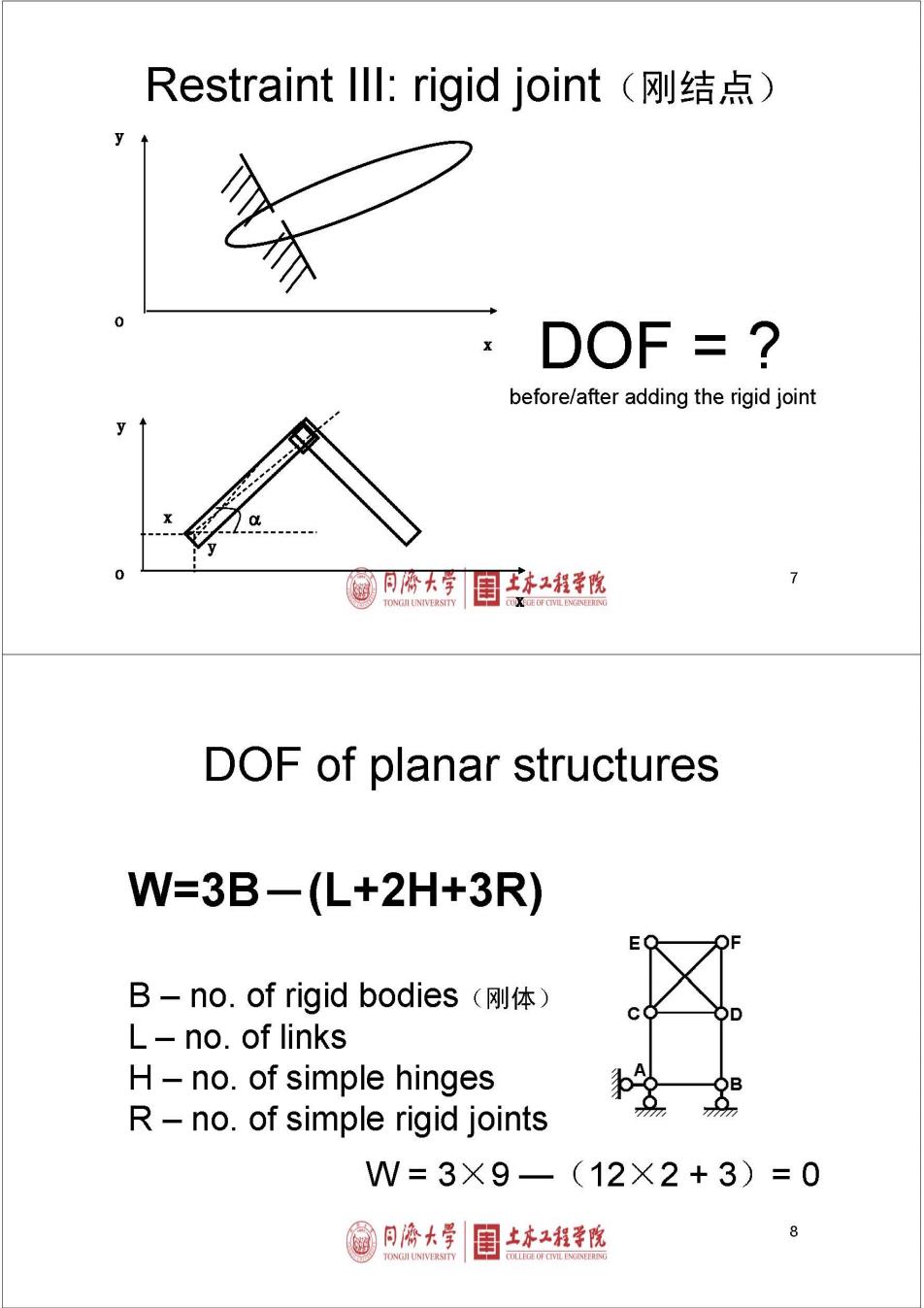
Restraint Ill::rigid joint(刚结点) DOF = before/after adding the rigid joint 同陈大学 王水2程学院 DOF of planar structures W=3B-(L+2H+3R) B-no.of rigid bodies(刚体) L-no.of links H-no.of simple hinges R-no.of simple rigid joints W=3×9一(12X2+3)=0 同©大学 土亦1程学院 8 TONGJI UNIVERSIT

DOF of planar hinged structures (平面铰接结构) W=2J-L J-no.of joints L-no.of links W=2X6-12=0 同榜大学 土本2程学院 9 TONGJI UNIVERSIT DOF vs.stability W>0:insufficient restraints,unstable. W=0 or W<0,necessary but not sufficient for stability. 同濟大学 目土本红程学院 10 TONGJI UNIVERSIT