第 2章 机械密封的基本参数 流体润滑5密封基琐 2.1 几何参数 2.1.2 密封摩擦副密封面间隙ho 2.密封面动间隙hyn 当考虑两个环之间相对运动所产生的流体动压效应时,密 封面有动间隙。动间隙的大小与表面粗糙度、介质的动力粘 度、密封环的平均周速、密封端面比压等因素有关。 hdyn =k R(H-v/peR )n (3一4) 式中k为无因次系数,对润滑油,k=0.07~0.15;R2为微 观不平度十点平均高度,m;μ为介质的运动粘度,Nsm2; v为密封环的平均线速度,m/s;pe为密封面比压,NWm2;n 为指数,n=23
第 2章 2.1 几何参数 2.密封面动间隙hdyn 当考虑两个环之间相对运动所产生的流体动压效应时,密 封面有动间隙。动间隙的大小与表面粗糙度、介质的动力粘 度、密封环的平均周速、密封端面比压等因素有关。 hdyn =k Rz (μ·ν/ pc·Rz ) n (3-4) 式中k为无因次系数,对润滑油,k=0.07~0.15; Rz为微 观不平度十点平均高度,μm;μ为介质的运动粘度,N·s/m2; ν为密封环的平均线速度,m/s;pc为密封面比压,N/m2;n 为指数,n=2/3。 2.1.2 密封摩擦副密封面间隙h0 机械密封的基本参数
第2 机械密封的基本参数 流体润滑与密封基删 2.1 几何参数 2.1.3 机械密封接触面积 广义的接触面积有三种。 名义接触面积A如 1、名义接触面积An 武3= 轮廓接触面积A 两接触物体宏观边界所 5 实际接触面积A: 决定的几何面积,即具有 理想光滑平面的两物体接 触的面积。An=a×b An=Tl4(d22-d12) 式中d1、d2为密封界面 内、外直径,m;
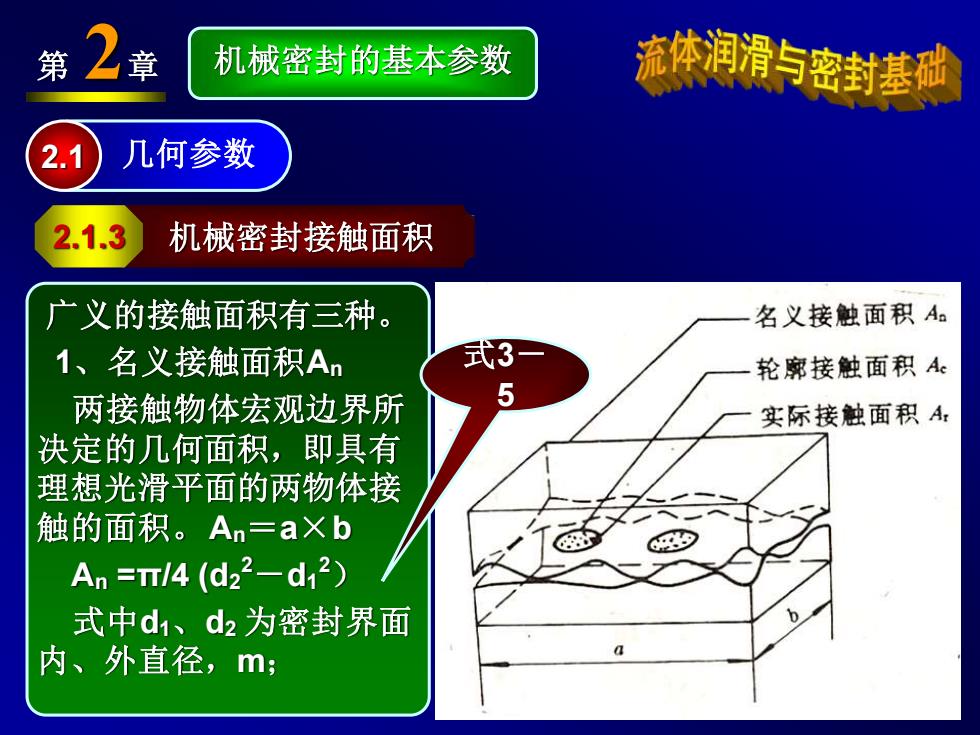
第 2章 2.1 几何参数 2.1.3 机械密封接触面积 机械密封的基本参数 广义的接触面积有三种。 1、名义接触面积An 两接触物体宏观边界所 决定的几何面积,即具有 理想光滑平面的两物体接 触的面积。An=a×b An =π/4 (d2 2-d1 2) 式中d1、d2 为密封界面 内、外直径,m; 式3- 5

第3章 机械密封的基本参数 流体润滑胪密封基硝 2.1 几何参数 2.1.3 机械密封接触面积 2、轮廓接触面积Ac 轮廓接触面积是指两物体接触表面波峰上接触的轮廓接触 微元面积之和。 Ac=ΣAci (3-6) 式中Ac为轮廓接触微元面积,m;
第 3章 2.1 几何参数 2.1.3 机械密封接触面积 机械密封的基本参数 2、轮廓接触面积Ac 轮廓接触面积是指两物体接触表面波峰上接触的轮廓接触 微元面积之和。 Ac =ΣAci (3-6) 式中Aci为轮廓接触微元面积 ,m2 ;
第2章 机械密封的基本参数 流体润滑齁密封基础 2.1 几何参数 机械密封的接触比压就是由实 际接触面积的承载能力转换为 2.1.3 机械密封接触面积 名义接触面积的承担能力。 3、实际接触面积A 实际接触面积是指为微凸体接触时各微凸体发生变形而产 生的微凸体接触面积的总和。 Ar=ΣAi (3-7) 式中A为各微凸体接触面积,m; 接触面积的极小一部分,实际接触面积随接触面间载荷的 增大而增加,更多新的接触点产生
第 2章 2.1 几何参数 2.1.3 机械密封接触面积 机械密封的基本参数 3、实际接触面积Ar 实际接触面积是指为微凸体接触时各微凸体发生变形而产 生的微凸体接触面积的总和。 Ar =ΣAri (3-7) 式中Ari为各微凸体接触面积 ,m2 ; 接触面积的极小一部分,实际接触面积随接触面间载荷的 增大而增加,更多新的接触点产生。 机械密封的接触比压就是由实 际接触面积的承载能力转换为 名义接触面积的承担能力
第2章 机械密封的基本参数 流体润滑与密封基础 2.1 几何参数 2.1.4 密封面的宽度和高度 机械密封常用几何尺寸及符号说明见图
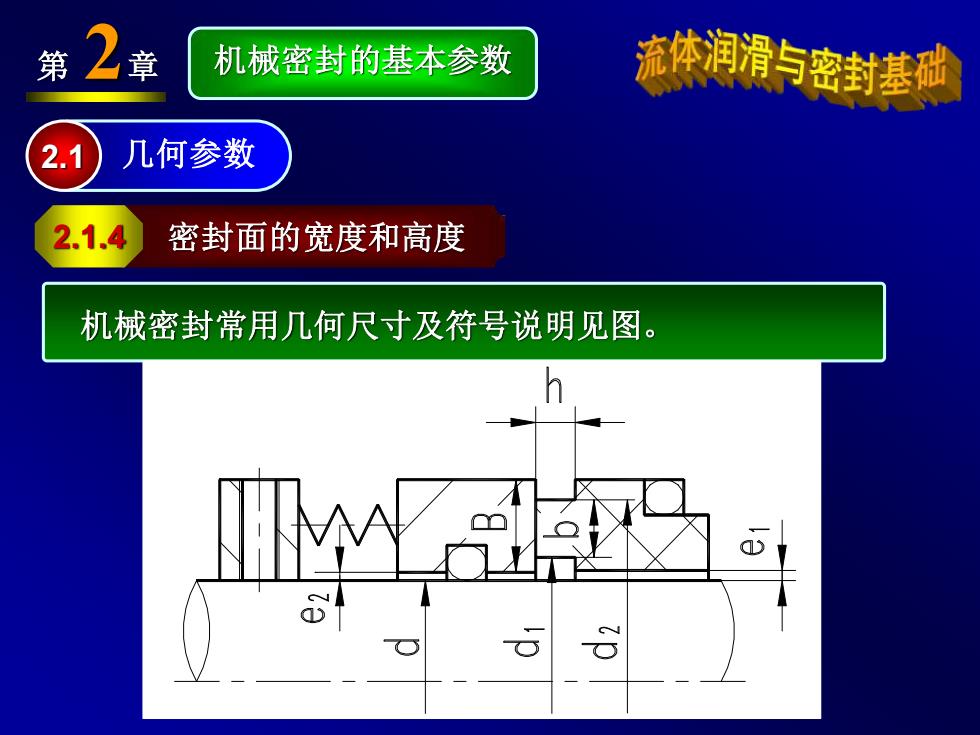
第 2章 2.1 几何参数 2.1.4 密封面的宽度和高度 机械密封的基本参数 机械密封常用几何尺寸及符号说明见图