
A.自动控制系统的分类 (一)按反馈情况,可分为:开环控制系统、闭环控制系统。 1.开环控制系统 输入、输出间不存在反馈,输出量对系统的控制作用无影响,精度 取决于系统各部分的标准精度以及工作中元件和参数的稳定程度。 特点:若不存在内外干扰,且元件参数稳定,系统简单,可保证足 够精度。如:导弹发射架控制系统。 恒温箱 例1.人工控制的恒温箱 →温度计 加热电阻丝 220V 调压器 图1.3人工控制的恒温箱 测量:温度计 被控对象:恒温箱 被控量:温度 控制器:调压器,改变加热电阻丝的电流 观察的温度与要求的温度进行比较一偏差,当低于所要求的T时,向 右移动触头,I↑、T↑。反之,左移
A.自动控制系统的分类 (一)按反馈情况,可分为:开环控制系统、闭环控制系统。 1.开环控制系统 输入、输出间不存在反馈,输出量对系统的控制作用无影响,精度 取决于系统各部分的标准精度以及工作中元件和参数的稳定程度。 特点:若不存在内外干扰,且元件参数稳定,系统简单,可保证足 够精度。 如:导弹发射架控制系统。 恒温箱 例 1.人工控制的恒温箱 温度计 加热电阻丝 220V 调压器 图 1.3 人工控制的恒温箱 测量:温度计 被控对象:恒温箱 被控量:温度 控制器:调压器,改变加热电阻丝的电流 观察的温度与要求的温度进行比较—偏差,当低于所要求的T时,向 右移动触头,I↑、T↑。反之,左移
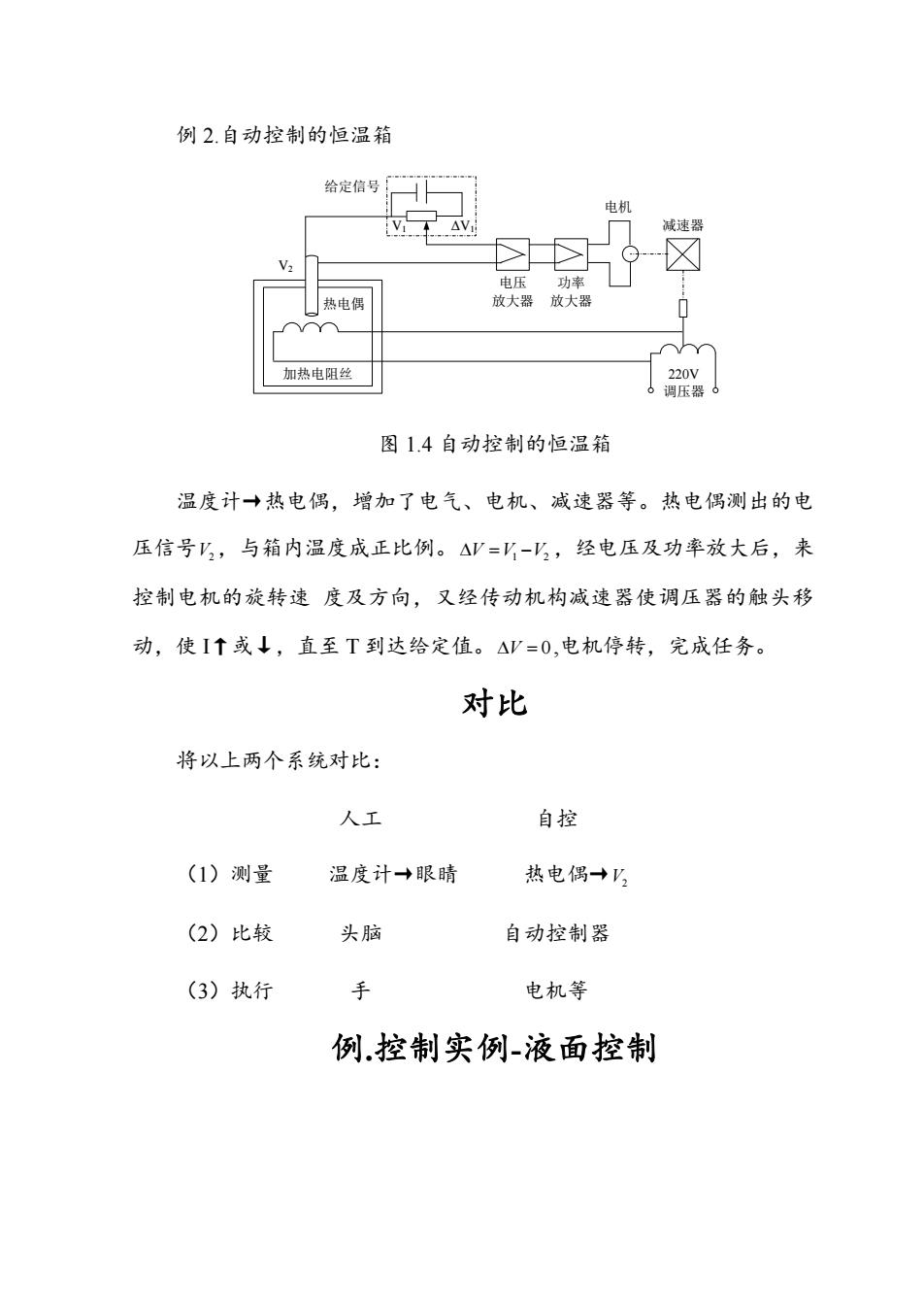
例2.自动控制的恒温箱 给定信号 电机 由 热电偶 放大器放大器 0 加热电阻丝 图1.4自动控制的恒温箱 温度计→热电偶,增加了电气、电机、减速器等。热电偶测出的电 压信号,与箱内温度成正比例。△V=-上,经电压及功率放大后,来 控制电机的旋转速度及方向,又经传动机构减速器使调压器的触头移 动,使I↑或↓,直至T到达给定值。△V=0,电机停转,完成任务。 对比 将以上两个系统对比: 人工 自控 (1)测量 温度计→眼睛 热电偶→V2 (2)比较 头脑 自动控制器 (3)执行 电机等 例控制实例-液面控制
例 2.自动控制的恒温箱 热电偶 加热电阻丝 220V 调压器 给定信号 V2 V1 ΔV1 电压 放大器 功率 放大器 电机 减速器 图 1.4 自动控制的恒温箱 温度计→热电偶,增加了电气、电机、减速器等。热电偶测出的电 压信号 V2 ,与箱内温度成正比例。 V V V 1 2 ,经电压及功率放大后,来 控制电机的旋转速 度及方向,又经传动机构减速器使调压器的触头移 动,使 I↑或↓,直至 T 到达给定值。 V 0 ,电机停转,完成任务。 对比 将以上两个系统对比: 人工 自控 (1)测量 温度计→眼睛 热电偶→ V2 (2)比较 头脑 自动控制器 (3)执行 手 电机等 例.控制实例-液面控制
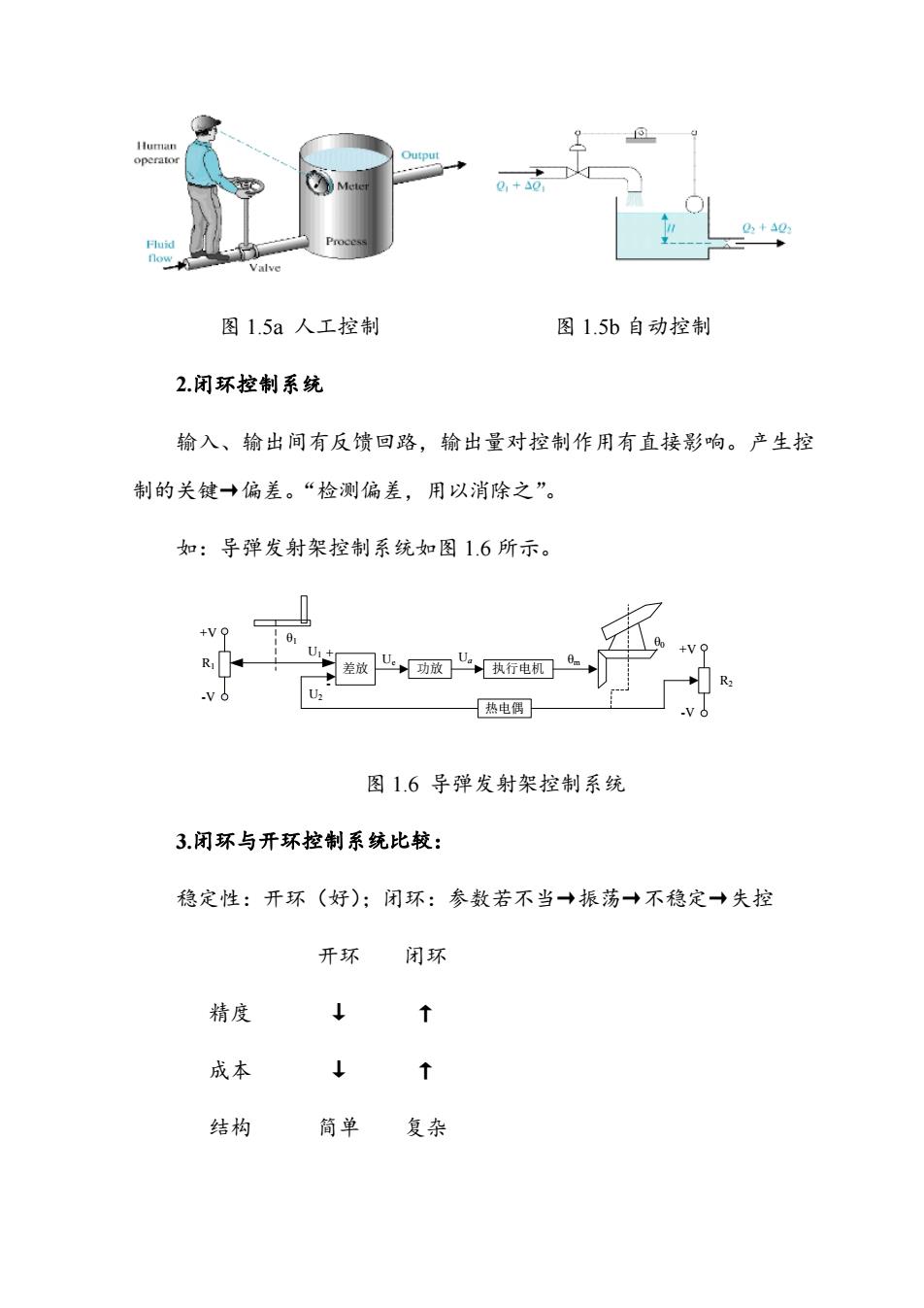
图1.5a人工控制 图1.5b自动控制 2.闭环控制系统 输入、输出间有反馈回路,输出量对控制作用有直接影响。产生控 制的关镀→偏差。“检测偏差,用以消除之”。 如:导弹发射架控制系统如图1.6所示 +V9 装收凸功,执行电 热电偶 图1.6导弹发射架控制系统 3闭环与开环控制系统比较: 稳定性:开环(好):闭环:参数若不当+振荡→不稳定→失控 开环闭环 精度 成本 y ↑ 结构 简单 复杂
图 1.5a 人工控制 图 1.5b 自动控制 2.闭环控制系统 输入、输出间有反馈回路,输出量对控制作用有直接影响。产生控 制的关键→偏差。“检测偏差,用以消除之”。 如:导弹发射架控制系统如图 1.6 所示。 差放 功放 执行电机 U1 R1 + θm 热电偶 U2 - +V -V Ue Ua R2 +V -V θ0 θ1 图 1.6 导弹发射架控制系统 3.闭环与开环控制系统比较: 稳定性:开环(好);闭环:参数若不当→振荡→不稳定→失控 开环 闭环 精度 ↓ ↑ 成本 ↓ ↑ 结构 简单 复杂