控制系统的基本概念和原理 ①反馈控制 把输出量的一部分检测出来,反馈到输入端,与给 定信号进行比较,产生偏差,此偏差经过控制器产生 控制作用,使输出量按照要求的规律变化; 反馈信号与给定信号极性相反为负反馈,反之为 正反馈。 ②反馈控制特点 输入控制输出,输出参与控制 检测偏差、纠正偏差 具有抗干扰能力 结构复杂 2023年7月24日4时47分 北京料技大学自动化学院控制系 15
2023年7月24日4时47分 15 控制系统的基本概念和原理 ① 反馈控制 – 把输出量的一部分检测出来,反馈到输入端,与给 定信号进行比较,产生偏差,此偏差经过控制器产生 控制作用,使输出量按照要求的规律变化; – 反馈信号与给定信号极性相反为负反馈,反之为 正反馈。 ② 反馈控制特点 – 输入控制输出,输出参与控制 – 检测偏差、纠正偏差 – 具有抗干扰能力 – 结构复杂 北京科技大学自动化学院控制系
控制系统的基本概念和原理 闭环控制系统的自动控制或者自动调节作用是基 于输出信号的负反馈作用而产生的,所以经典控制理 论的主要研究对象是负反馈的闭环控制条统,研究目 的是得到它的一般规律,从而可以设计出待合设计要 求的,满足实际需要的,性能指标优良的控制系统。 2023年7月24日4时47分 北京料技大学自动化学院控制系 ⑤返回 16
2023年7月24日4时47分 16 控制系统的基本概念和原理 闭环控制系统的自动控制或者自动调节作用是基 于输出信号的负反馈作用而产生的,所以经典控制理 论的主要研究对象是负反馈的闭环控制系统,研究目 的是得到它的一般规律,从而可以设计出符合设计要 求的,满足实际需要的,性能指标优良的控制系统。 北京科技大学自动化学院控制系
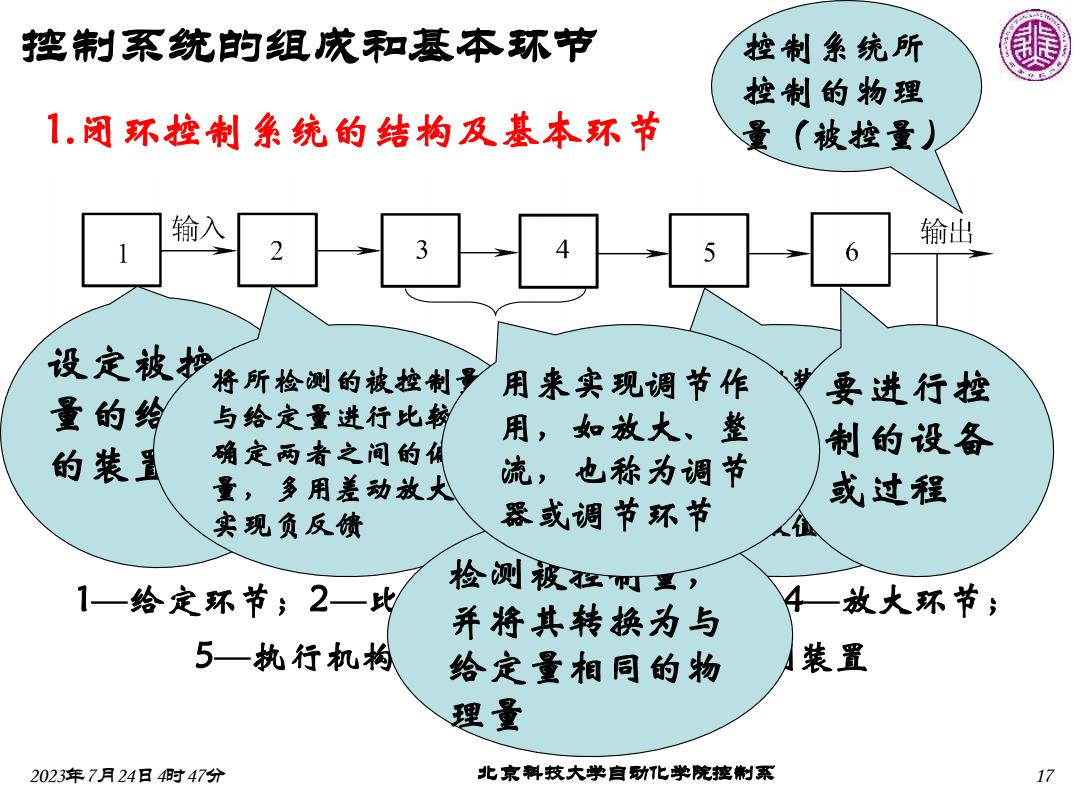
控制系统的组成和基本环节 控制系统所 控制的物理 1.闭环控制象统的结构及基本环节 量(被控量) 输入 输出 2 3 4 5 设定被 将所检测的被控制予用来实现调节作 要进行控 量的给 与给定量进行比翰 用,如放大、整 的装置 确定两者之间的 制的设备 量,多用差动放大 流,也称为调节 或过程 实现负反馈 器或调节环节 检测被在网) 1一给定环节;2一比 并将其转换为与 4一放大环节; 5一执行机构 给定量相同的物 装置 理量 2023年7月24日4时47分 北京料技大学自动化学院控制系 17
2023年7月24日4时47分 17 控制系统的组成和基本环节 1—给定环节;2—比较环节;3—校正环节;4—放大环节; 5—执行机构;6—被控对象;7—检测装置 1.闭环控制系统的结构及基本环节 设定被控制 量的给定值 的装置 将所检测的被控制量 与给定量进行比较, 确定两者之间的偏差 量,多用差动放大器 实现负反馈 一般由传动装置和调 节机构组成。执行机 构直接作用于控制对 象,使被控制量达到 所要求的数值 要进行控 制的设备 或过程 控制系统所 控制的物理 量(被控量) 检测被控制量, 并将其转换为与 给定量相同的物 理量 用来实现调节作 用,如放大、整 流,也称为调节 器或调节环节 北京科技大学自动化学院控制系
控利系统的组成和基本环节 2.闭环控制象统中的基本术语 ()被控对象 (7)偏差量 (2)被控量或输出量 (⑧)前向通道或正向通道 (3)控制量 (9)反馈通道或反向通道 (4)设定量或输入量 (10)理想输出 (5)扰动量 (11)实际输出 (6)反馈量 (12)检测量 2023年7月24日4时47分 北京料技大学自动化学院控制系 ⑤返回 18
2023年7月24日4时47分 18 控制系统的组成和基本环节 (1) 被控对象 (2) 被控量或输出量 (3) 控制量 (4) 设定量或输入量 (5) 扰动量 (6) 反馈量 2.闭环控制系统中的基本术语 (7) 偏差量 (8) 前向通道或正向通道 (9) 反馈通道或反向通道 (10) 理想输出 (11) 实际输出 (12) 检测量 北京科技大学自动化学院控制系
自功控制系统的分类 1.按照主要元件的特性方程的输入输出特征划分 线性系统:由线性元件组成的条统,主要特征是满足 叠如原理和齐次定理, 当条统在输入信号u1()的作用下产生系统的输出y(), 当条统在输入信号U2()的作用下产生系统的输出y2()。 那么,当系统的输入信号为u(t)+bu2(t)时,系统的 输出满足ay1(t)+by2(t),a,b是常数或时变参数。 非线性系统:由非线性元件组成的条统,不满足叠如 原理和齐次定理。 2023年7月24日4时47分 北京料技大学自动化学院控制系 19
2023年7月24日4时47分 19 自动控制系统的分类 1.按照主要元件的特性方程的输入输出特征划分 线性系统:由线性元件组成的系统,主要特征是满足 叠加原理和齐次定理, 当系统在输入信号u1 (t)的作用下产生系统的输出y1 (t), 当系统在输入信号u2 (t)的作用下产生系统的输出y2 (t)。 那么,当系统的输入信号为au1 (t)+bu2 (t)时,系统的 输出满足ay1 (t)+by2 (t),a,b是常数或时变参数。 非线性系统:由非线性元件组成的系统,不满足叠加 原理和齐次定理。 北京科技大学自动化学院控制系