
德仓创机器人 Dechuang Robot 4.羽毛球机器人运动控制系统设计 羽毛球机器人运动控制系统:驱动系统电气驱动 驱动电机比较 电机类型 优点 应用 步进电机 控制简单、成本低 精度、速度要求不高的开环系统 直流伺服电机 高启动转矩、大转矩、低惯量 高精度、高速度的位置闭环控制系统 交流伺服电机 高启动转矩、大转矩、低惯量、防爆 高精度、高速度的位置闭环控制系统 直接驱动电机 高启动转矩、大转矩、低惯量、功率密度高 高精度、高速度、功率密度高的位置闭环控制系统 12
4.羽毛球机器人运动控制系统设计 12 羽毛球机器人运动控制系统:驱动系统---电气驱动 电机类型 优点 应用 步进电机 控制简单、成本低 精度、速度要求不高的开环系统 直流伺服电机 高启动转矩、大转矩、低惯量 高精度、高速度的位置闭环控制系统 交流伺服电机 高启动转矩、大转矩、低惯量、防爆 高精度、高速度的位置闭环控制系统 直接驱动电机 高启动转矩、大转矩、低惯量、功率密度高 高精度、高速度、功率密度高的位置闭环控制系统 驱动电机比较
德仓创机器人 Dechuang Robot 4.羽毛球机器人运动控制系统设计 羽毛球机器人运动控制系统:驱动系统电气驱动 步进电机驱动 步进电机将电脉冲信号变换为相应的角位移或直线位移,与脉冲数成正比,经常用于构建开环数字控制系统,但存在 过载能力差、调速范围相对较小、低速运动有脉动、功率密度低和不平衡等缺点。其包括脉冲发生器、环形分配器 和功率放大等几部分。 Rotor Laminations Rotor Lamination 5t or Pole Half Pitch Off Set a) b) c) 转子 定子 单相通电 换相通电 两相通电 13
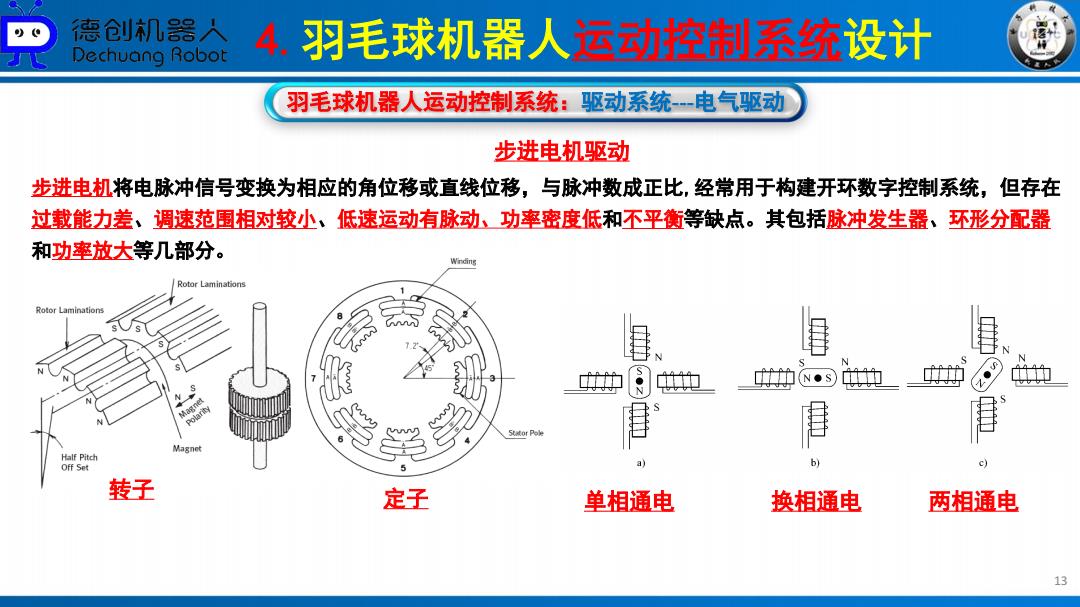
4.羽毛球机器人运动控制系统设计 13 羽毛球机器人运动控制系统:驱动系统---电气驱动 步进电机驱动 步进电机将电脉冲信号变换为相应的角位移或直线位移,与脉冲数成正比,经常用于构建开环数字控制系统,但存在 过载能力差、调速范围相对较小、低速运动有脉动、功率密度低和不平衡等缺点。其包括脉冲发生器、环形分配器 和功率放大等几部分。 单相通电 换相通电 两相通电 转子 定子
德仓创机器人 Dechuang Robot 4.羽毛球机器人运动控制系统设计 羽毛球机器人运动控制系统:驱动系统电气驱动 步进电机驱动 螺钉 转子1 永久磁钢 波纹垫围一 滚珠轴承 定子铁芯 转子2 轴承 磁钢 前瑞盖 000e60802 后瑞盖 型料骨架 型料骨架 转轴 转子铁芯 定子 一转子线芯 线圈 一输承 步进电机构造 14
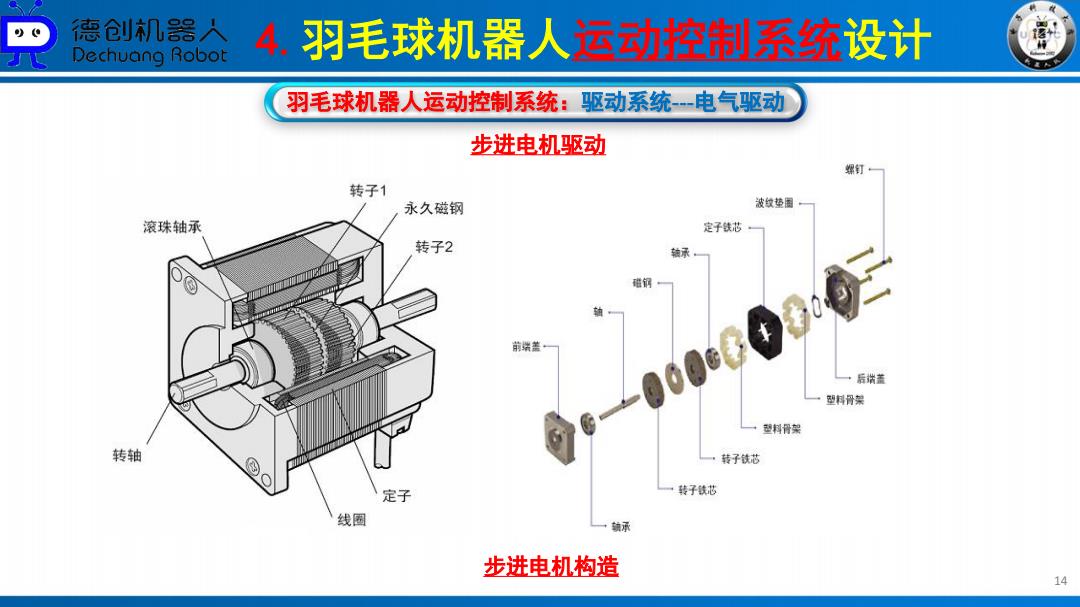
4.羽毛球机器人运动控制系统设计 14 羽毛球机器人运动控制系统:驱动系统---电气驱动 步进电机驱动 步进电机构造
德仓创机器人 Dechuang Robot 4.羽毛球机器人运动控制系统设计 羽毛球机器人运动控制系统:驱动系统电气驱动 步进电机驱动 4.5 86HS rallel MD882.48VDC.8.2A (Peak).Half step 参数名称 3.5 相数 电机内部的线圈 拍数 完成一个磁场周 或指电机转过一 2.5 保持转矩 指步进电机通电 步距角 对应一个脉冲信号 定位转矩 电机在不通电状态 .5 失步 电机运转时运转的 失调角 转子齿轴线偏移定 角产生的误差,采 0.5 运行矩频 特性 电机在某种测试条 200 400 600 800 1000 1200 1400 1600 1800 2000 2200 2400 Rotation speed (RPM) 步进电机矩频特性曲线 15
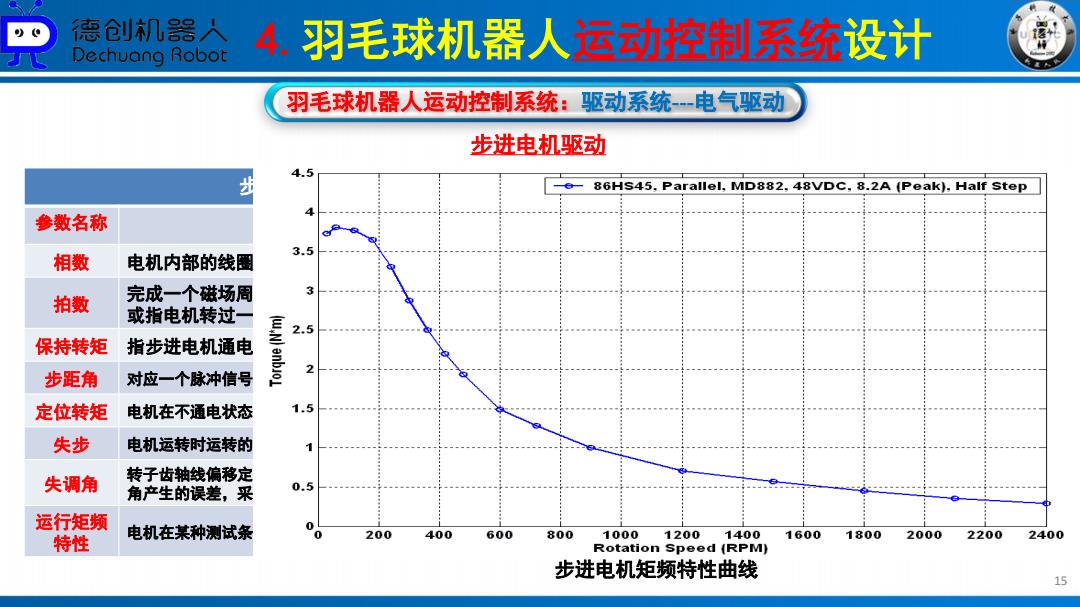
4.羽毛球机器人运动控制系统设计 15 羽毛球机器人运动控制系统:驱动系统---电气驱动 步进电机驱动 步进电机主要参数 参数名称 参数意义 相数 电机内部的线圈组数,常用的有两相、三相、五相步进电机 拍数 完成一个磁场周期性变化所需脉冲数或导电状态,用m表示, 或指电机转过一个齿距角所需脉冲数 保持转矩 指步进电机通电但没有转动时,定子锁住转子的力矩 步距角 对应一个脉冲信号,电机转子转过的角位移 定位转矩 电机在不通电状态下,电机转子自身的锁定力矩 失步 电机运转时运转的步数,不等于理论上的步数 失调角 转子齿轴线偏移定子齿轴线的角度,电机运转必存在失调角,由失调 角产生的误差,采用细分驱动是不能解决的 运行矩频 特性 电机在某种测试条件下测得运行中输出力矩与频率关系的曲线 步进电机矩频特性曲线
德仓创机器人 Dechuang Robot 4.羽毛球机器人运动控制系统设计 羽毛球机器人运动控制系统:驱动系统电气驱动 步进电机驱动 步进电机主要特点 步进电机的精度为步距角的3-5%,不累积 步进电机外表允许的最高温度取决于不同电机磁性材料的退磁点 力矩会随转速的升高而下降(=E+L(didt)+郴) 步进电机在空载情况下能够正常启动的脉冲频率,如果脉冲频率高于该值,电机不能正常启动,可能发生 空载启动频率 丢步或堵转;步进电机的起步速度一般在10~100RPM,伺服电机的起步速度一般在100~300PM。根据电机大 小和负载情况而定,大电机一般对应较低的起步速度 低频振动特性 步进电动机以连续的步距状态边移动边重复运转 步进电机低速转动时振动和噪声大是其固有的缺点 16
4.羽毛球机器人运动控制系统设计 16 羽毛球机器人运动控制系统:驱动系统---电气驱动 步进电机驱动 步进电机主要特点 步进电机的精度为步距角的3-5%,不累积 步进电机外表允许的最高温度取决于不同电机磁性材料的退磁点 力矩会随转速的升高而下降(U=E+L(di/dt)+I*R) 空载启动频率 步进电机在空载情况下能够正常启动的脉冲频率,如果脉冲频率高于该值,电机不能正常启动,可能发生 丢步或堵转;步进电机的起步速度一般在10~100RPM,伺服电机的起步速度一般在100~300RPM。根据电机大 小和负载情况而定,大电机一般对应较低的起步速度 低频振动特性 步进电动机以连续的步距状态边移动边重复运转 步进电机低速转动时振动和噪声大是其固有的缺点