
电子神越女学 智能机器人原理与实践 运动控制系统设计 骆德渊博士、教投 电子科技大学机械与电气工程学院副院长 电子科技大学机器人队总教练
运动控制系统设计

德仓创机器人 Dechuang Robot 4.羽毛球机器人运动控制系统设计 机器人运动控制系统就是控制执行部件按照既定任务、流程沿着一定的路径或目标运动,完成预期的任务。主要包 括执行器及其驱动系统、运动控制模型、运动控制算法。 多自由度 点到点 加减速 运动复杂 智能控制 连续轨迹 控制 特点 控制 方式 运算量大 重复精度 力及力矩 高 控制 速度控制
4.羽毛球机器人运动控制系统设计 3 机器人运动控制系统就是控制执行部件按照既定任务、流程沿着一定的路径或目标运动,完成预期的任务。主要包 括执行器及其驱动系统、运动控制模型、运动控制算法。 特点 多自由度 运动复杂 重复精度 高 运算量大 加减速 控制 控制 方式 点到点 连续轨迹 速度控制 力及力矩 控制 智能控制

德仓创机器人 Dechuang Robot 4.羽毛球机器人运动控制系统设计 机器人结问部分 松制阳计算视 什开机门 蠹 集中 操作位制 拉 存销装宣 控制 秋处年 驱动 系统 控制系 示教盒 统结构 集中控制方式的构成框图 分布式 主从 运动控 运动控 嵌入式 控制 控制 制算法 制系统 运动控 制器 马的图图国国回 运动控 制模型 产路 CRT 家行 漫2 型单 主从控制方式的构成框图 分散控制方式的控制框图
4.羽毛球机器人运动控制系统设计 4 运动控 制系统 驱动 系统 嵌入式 运动控 制器 运动控 制模型 运动控 制算法 控制系 统结构 集中 控制 主从 控制 分布式 控制 集中控制方式的构成框图 主从控制方式的构成框图 分散控制方式的控制框图

”0 德仓创机器人 Dechuang Robot 4.羽毛球机器人运动控制系统设计 羽毛球机器人运动控制系统:驱动系统 刚度 直线驱动包括直角坐标机构的X、Y、Z向驱动,圆柱坐 柔性 直线 标结构的径向驱动和垂直升降驱动,球坐标结构的径 驱动 向伸缩驱动。 ·直线运动可直接由气缸或液压缸和活塞产生,也可以 驱动系 驱动 由齿轮齿条、丝杠、螺母等传动方式把旋转运动转换 统性能 成直线运动。 功率 方式 密度 旋转运动由普通电机和伺服电机直接产生,因输出 旋转 力矩小,转速高,需各种传动装置把较高的转速转 步进机比伺服电机重,其功率一重量比低 驱动 换成较低的转速,并获得较大的力矩。齿轮链、同 步皮带和谐波齿轮可实现运动的传递和转换。 电机的电压越高,功率-重量比越高 直线液压缸或气缸需要用转换机构把直线运动转换 气动功率-重量比最低 成旋转运动。 而液压系统具有最高的功率-重量比 5
4.羽毛球机器人运动控制系统设计 5 驱动系 统性能 刚度 柔性 重量 功率 密度 羽毛球机器人运动控制系统:驱动系统 驱动 方式 直线 驱动 旋转 • 步进机比伺服电机重,其功率-重量比低 驱动 • 电机的电压越高,功率-重量比越高 • 气动功率-重量比最低 • 而液压系统具有最高的功率-重量比 • 直线驱动包括直角坐标机构的X、Y、Z向驱动,圆柱坐 标结构的径向驱动和垂直升降驱动,球坐标结构的径 向伸缩驱动。 • 直线运动可直接由气缸或液压缸和活塞产生,也可以 由齿轮齿条、丝杠、螺母等传动方式把旋转运动转换 成直线运动。 • 旋转运动由普通电机和伺服电机直接产生,因输出 力矩小,转速高,需各种传动装置把较高的转速转 换成较低的转速,并获得较大的力矩。齿轮链、同 步皮带和谐波齿轮可实现运动的传递和转换。 • 直线液压缸或气缸需要用转换机构把直线运动转换 成旋转运动
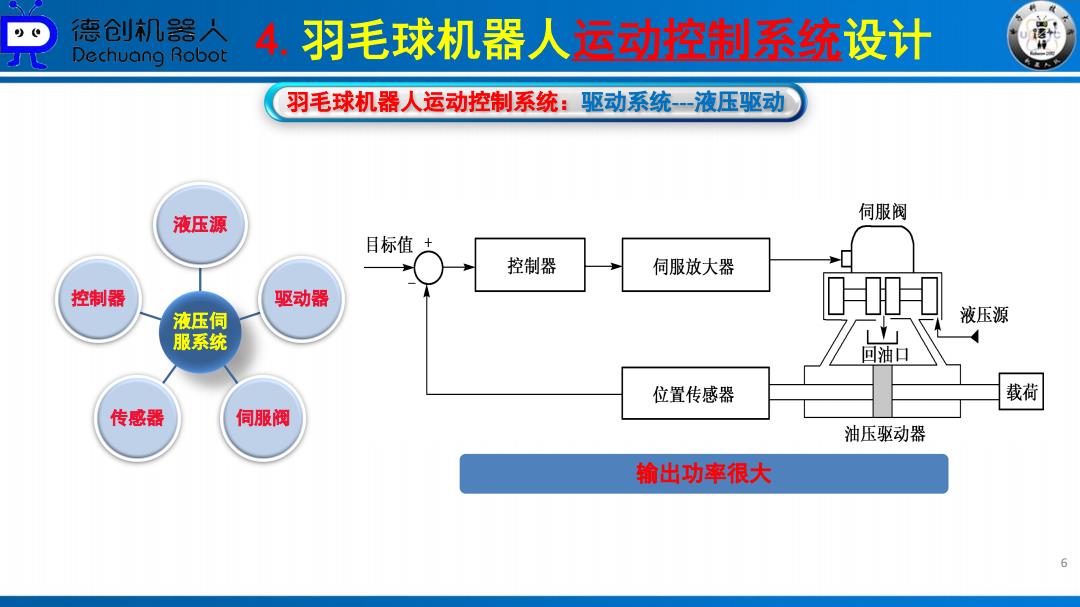
90 德仓创机器人 Dechuang Robot 4.羽毛球机器人运动控制系统设计 羽毛球机器人运动控制系统:驱动系统一液压驱动 液压源 伺服阀 目标值 控制器 伺服放大器 控制器 驱动器 H 液压伺 液压源 服系统 回油口 位置传感器 载荷 传感器 伺服阀 油压驱动器 输出功率很大 6
4.羽毛球机器人运动控制系统设计 6 液压伺 服系统 液压源 驱动器 传感器 伺服阀 控制器 羽毛球机器人运动控制系统:驱动系统---液压驱动 输出功率很大